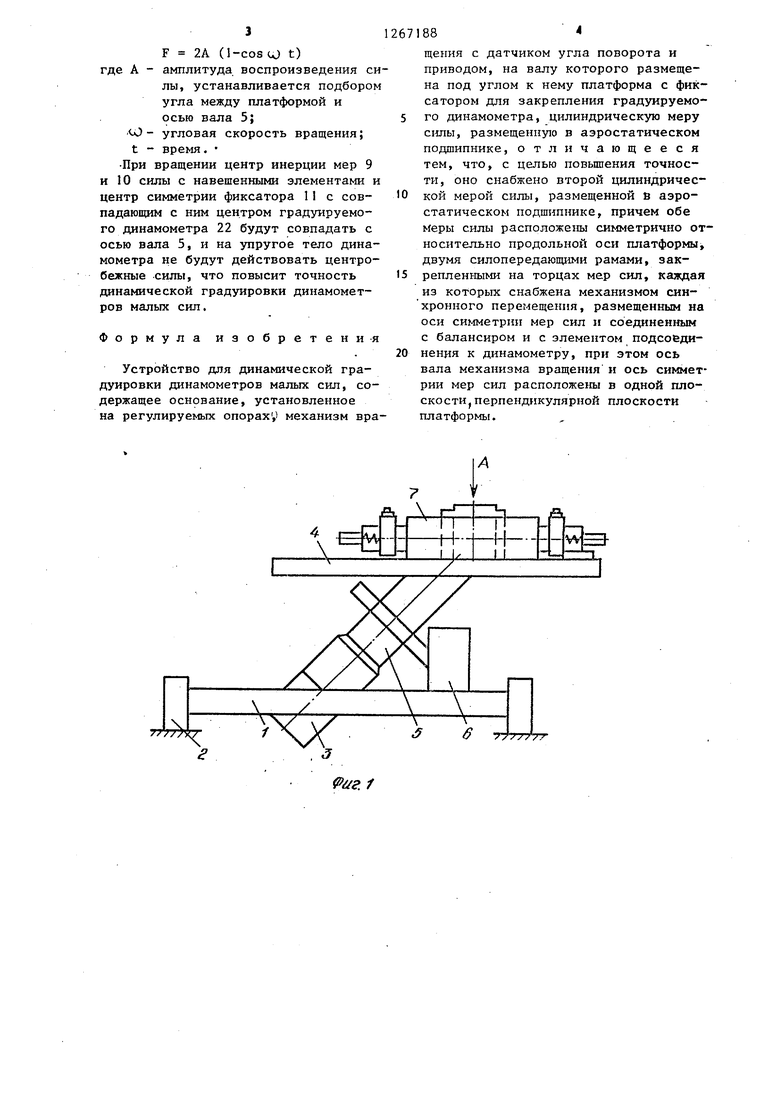
Изобретение относится к силоизмё рительной технике и может быть использовано для динамической градуировки динамометров малых сил. Целью изобретения является повышение точности динамической градуировки динамометров. Па фиг.1 схематически изображено устройство, обвдлй вид; на фиг.2 вид А на фиг.1; на фиг.З - сечение Б-Б на фиг.2. Устройство для динамической градуировки динамометров малых сил содержит основание 1, расноложенное на регулируемых опорах 2, механизм 3 вращения с приводом, платформу 4, установленную на валу 5 механизма 3 Вращения, датчик угла поворота 6 ва ла механизма вращения. Платформа 4 установлена под углом к оси вала 5, равным . .V 1 . 2А « - arcsin 5- где А - амплитуда воспроизводимой силы; Р,, - вес мер силы с присоединенными к ним элементами. На платформе 4 установлены аэростатические подигапники 7 и 8, меры и 10 силы и фиксатор П для закрепления градуируемого динамометра, с осью, параллельной платформе. Меры 9 и 10 силы выполнены цилиндрически ми и охватываются подшипниками 7 и 8, оси которых параллельны платформе 4. Плоскость, проходящая через оси мер 9 и 10 силы, параллельна платформе 4, а плоскость, проведенная через ось симметрии мер 9 и 10 силы и ось вала, механизма вращев;ия перпендикулярна платформе 4. Фиксатор 11 динамометра установлен таким образом, чтобы центр его симметрии совпал с осью вала 5 механизма вращ ния. Па фиксаторе 11 нанесены метк координат центра симметрии. Па торцах мер 9 и 10 силы симметрично им закреплены силопередающие рамы 12. В центрах симметрии силопередающих 12 установлены механизмы 13 син хронного перемещения, к которым под соединены балансиры 14 и элемент. 1 подсоединения (захваты) динамометра Балансиры 14 и захваты 15 параллель ны мерам) 9 и 10 силы, а их ось нересекается с осью вала 5 механизма вращения. 88 Механизмы 13 синхронного перемещения могут быть выполнены, например, клиновыми, и представлять из себя винтовой упор 16, клин 17, прямо-угольную направляющую 18 с пружиной 19 и пружины 20.,возврата, закрепленные на силопередающих рамах 12, балансирах 14 и захватах 15. Па платформе 4 установлен фиксатор 21 мер силы, обеспечивающий расноложение центра симметрии, а следовательно, и центр инерции систёмьг, состоящей из мер 9 и 10 силы, силопередающих рам 12, механизмов 13 синхронного перемещения , балапсиров 14 и захватов 15 дпя присоединения динамометра 22 на оси вала 5. Устройство работает следующим образом. При помощи регулировки опор 2 и вращением вала 5 платформа 4 устанавливается в горизонтальное положение. Фиксатором 2 меры 9 и 10 силы фиксируются относительно платфор1.1Ы, при этом центр инерции мер 9 и 10 силы с подсоединенными к ним элементами совпадает с осью вала 5 механизма вращения. В фиксатор П устанавливается градуируемый динамометр 22, при этом, ориентируясь на метки координат центра симметрии фиксатора 11 , градуируемьй динамометр 22 устанавливается тг1К, чтобы центр его инерции coBnajt с центром симметрии фиксатора 11. Вращением упора 1 б механизма. 13 синхронного перемещения захват. 15 перемещается по общей оси симметрии мер силы и вводится в зацепление с градуируе -а|1м динамометром 22, Одновременно соответствутощий этому же механизму 13 перемещения балансир 14 перемещается на такое же расстояние, в результате чего суммарный момент инерции относительно центра симметрии силопередающей рамы 12 остается неизменным, а следовательно, и центр инерции мер 9 и .10 силы с навешенн1з м на них эле- ментами при подсоединенном к ним динамометре .22 остается на оси вала 5р Далее фиксатор 21 выводится из зацепления с мерами 9 и 10 силы, запускается привод механима 3 вращения и платформа 4 совершает вращательное движение в пространстве. По оси симметрии мер сил, на которой расположены элементы 15 нодсоединепия, будет действовать гармоническая си.ла 3 F 2А (1-cos (jj t) где A - амплитуда воспроизведения си лы, устанавливается подбором угла между платформой и осью вала 5; л) - угловая скорость вращения; t - время. При вращении центр инерции мер 9 и 10 силы с навешенными элементами и центр симметрии фиксатора 11 с совпадающим с ним центром градуируемого динамометра 22 будут совпадать с осью вала 5, и на упругое тело динамометра не будут действовать центробежные силы, что повысит точность динамической градуировки динамометров малых сил. Формула изобретения Устройство для динамической градуировки динамометров малых сил, содержащее основание, установленное на регулируемых опорах, механизм вра 88 щения с датчиком угла поворота и приводом, на валу которого размещена под углом к нему платформа с фиксатором для закрепления градуируемого динамометра, цилиндрическую меру силы, размещенную в аэростатическом подшипнике, отличающееся тем, что, с целью повьппения точности, оно снабжено второй цилиндрической мерой силы, размещенной в аэростатическом подшипнике, причем обе меры силы расположены симметрично относительно продольной оси платформы, двумя силопередающими рамами, закрепленными на торцах мер сил, калсдая из которых снабжена механизмом синхронного перемещения, размещенным на оси симметрии мер сил и соединенным с балансиром и с элементом подсоБдинения к динамометру, при этом ось вала механизма вращения и ось симметрии мер сил расположены в одной плоско сти перпендикулярной плоскости платформы.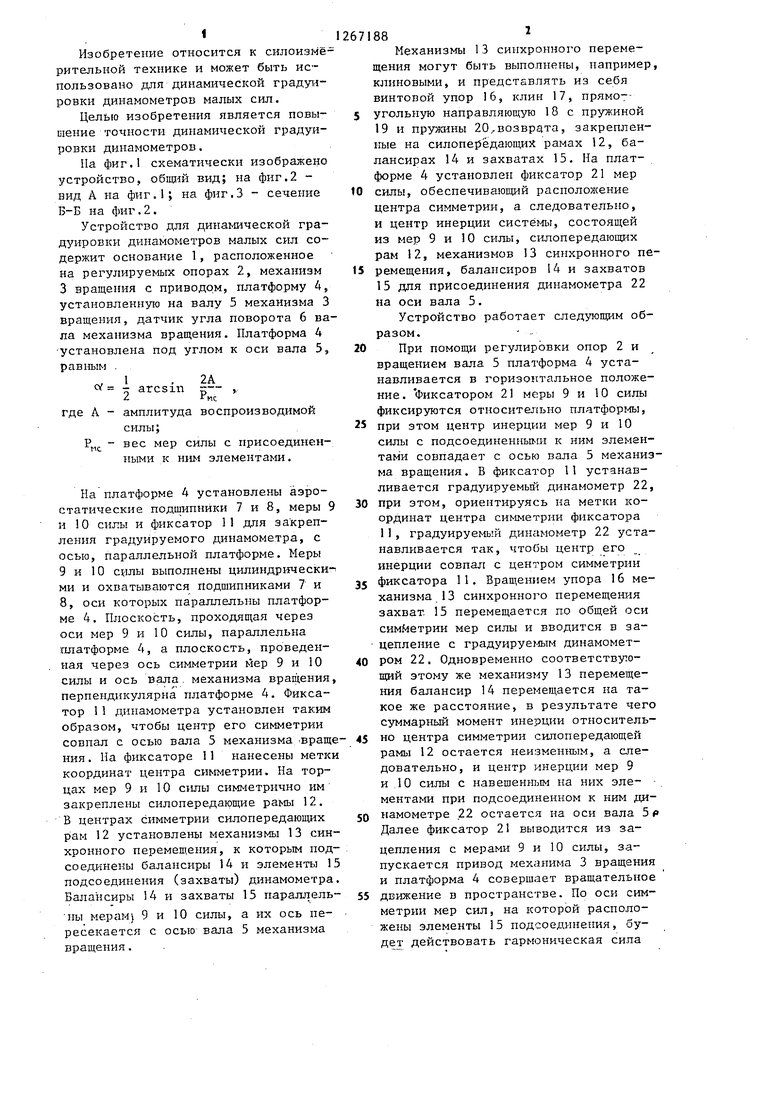
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для градуировки динамометров | 1982 |
|
SU1027552A1 |
| Устройство для градуировки универсальных динамометров | 1983 |
|
SU1112246A1 |
| Устройство для градуировки динамометров | 1981 |
|
SU970155A1 |
| Устройство для градуировки динамометров | 1983 |
|
SU1149131A1 |
| Устройство для градуировки динамометров | 1982 |
|
SU1091045A1 |
| Устройство для градуировки силовоспроизводящей машины с наклонной плоскостью | 1984 |
|
SU1312420A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИМПУЛЬСНОЙ РЕАКТИВНОЙ СИЛЫ ТЯГИ ЖРД МТ | 2011 |
|
RU2478924C1 |
| Способ градуировки динамометров и устройство для его осуществления | 1989 |
|
SU1719947A1 |
Изобретение относится к силоизмерительной технике и позволяет повысить точность динамической градуировки динамометров. На платформе 4 в аэростатических подшипниках 7 и 8 размещены цилиндрические меры 9 и 10 силы симметрично относительно продольной оси платформы. На торцах мер 9 и 10 закреплены силопередающие рамы с механизмами 13 синхронного перемещения и захватами 15 динамометра. Меры 9 и 10 фиксируются относительно платформы 4 фиксатором 2I. Градуируемый динамометр 22 устанавливается в фиксатор и вводится в зацепление с захватами 15. При вращении платформы 4 центр инерции мер 9 и 10, центр симметрии фиксатора 11 и центр градуируемого динамометра 22 совпадут с осью вала меха- нийма вращения, 4fo исключает деист- (Л вие на упругое тело динамометра центробежных сил. 3 ил.
хх
. /
w
If
18
| Стенд для тарировки силоизмерительных датчиков | 1974 |
|
SU497475A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для градуировки динамометров | 1982 |
|
SU1027552A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
