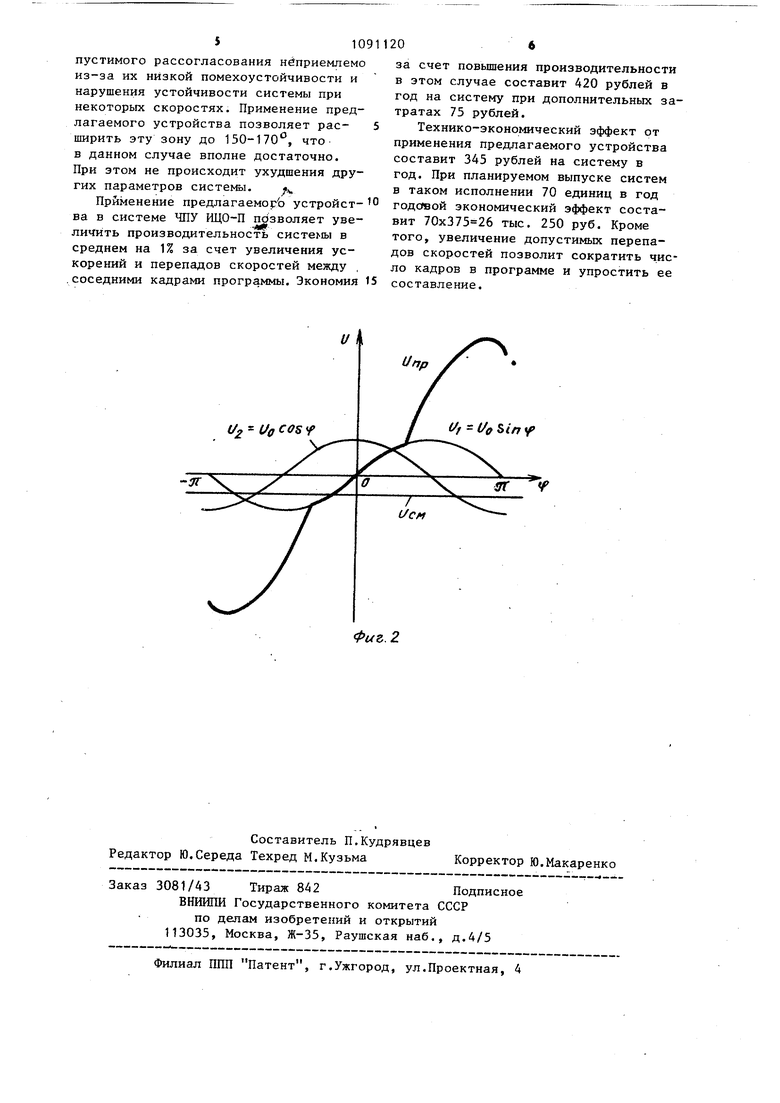
Фи. 1 Изобретение относится к автоматическому управлению и может быть использовано в следящих системах, например, в системах числового программного управления станками, датчик Гобратной связи в которых имеет синусный и косинусный выходы, например синусно-косинусный вращающийся трансформатор . Наиболее близким по технической сущности к предлагаемому является устройство, содержащее формирователь сигналов задания в виде синусно-косинусного цифроаналогового преобразователя, вход ксРгорого соединен с гене ратором синусоидальных колебаний, а выходы - с входами датчика обратной связи, в качестве которого использован вращающийся трансформатор, связан ный с приводом, вход которого соединен с выходом сумматора, выходы вращающегося трансформатора соединены с первым и вторым детекторами, вторые входы которых соединены с выходами генератора, а выход первого детектора соединен с триггером Шмидта Cl3. Недостатком известного устройства является низкая помехоустойчивость к импульсным помехам. Цель изобретения - повьшение помехоустойчивости. Поставленная цель достигается Тем, что в устройство, для управления следящим приводом, содержащее генератор, соединенный с входом формирователя сигналов задания, выходы которого соединены с входами датчика обратной связи, например вращаняцегося трансформатора, связанного с приводом вход которого соединен с выходом первого сумматора, первьш и второй выходы датчика обратной связи соединень соответственно с первым и вторым детекторами, вторые входы которых соединены с выходом генератора, а вькод первого детектора соединен с триггером Шмидта, введены последовательно соединенные источник напряжения смещения, второй сумматор, усилитель, диод и первый ключ, последовательно соединенные первый инвертор и второй ключ и второй инвертор, выход которого подключен к выходу триггера ПЬшдта и к второму входу второго ключа, соединенного выходом с первым входом пер вого сумматора, второй вход которого соединен с выходом первого ключа, а третий вход - с выходом первого детектора, причем выход второго инвертора соединен с вторым входом первого ключа, вход первого инвертора подключен к первому входу первого ключа, а второй вход второго сумматора подключен к второго детектора. Применение аналоговых элементов исключает сбой системы от импульсных помех, длите/1ьность которых меньше пост оянной времени привода. Управляющее воздействий на входе привода ( ), формируемое устройством в этом случае, имеет вид rUgsin, npH-J( Uf,(,sini/-UoCos4, при (ji (1) (UpSinf+UflCosM, при ..Я Ч -7Г/2, где U(j - максимальное значение напряжения на выходах детекторов, - величина рассогласования между заданным значением угла и положением привода. Зона допустимого рассогласования такого устройства составляет 135°. Управляющее воздействие, как функция рассогласования, в этой зоне не имеет разрывов, что ло сравнению с разрывной функцией, как правило, соответствует . большей устойчивости замкнутой- систе-. мы. Усиление сигнала второго детектора при помощи усилителя, включенного последоват.ельно с диодом позволяет расширить зону допустимого рассогласоваНИН до величины tarcctg(-K), где 135° arectg (-К) . Кроме того, увеличение крутизны передаточной характеристики, а следовательно, и добротности системы, при больших рассогласованиях позволяет улучшить динамические свойства следящей системы. При этом добротность системы при малых рассогласованиях не изменяется. Управляющее воздействие в этом случае имеет вид UoSinV, при-5/2 Л/2 ; -np- UosinV-KUoCosV, при j (2) |Uo sinV+-KUpCosV, при -;Г tf -Jr/2 , где К - коэффициент усиления усилителя. Включение между выходом второго детектора и диодом второго сумматора, второй вход которого соединен с источником напряжения смещени;я, позволяет путем добавления постоянной составля-. ницей к сигналу детектора сместить в зону меньших рассогласований точку излома кривой управлякщего воздейстт
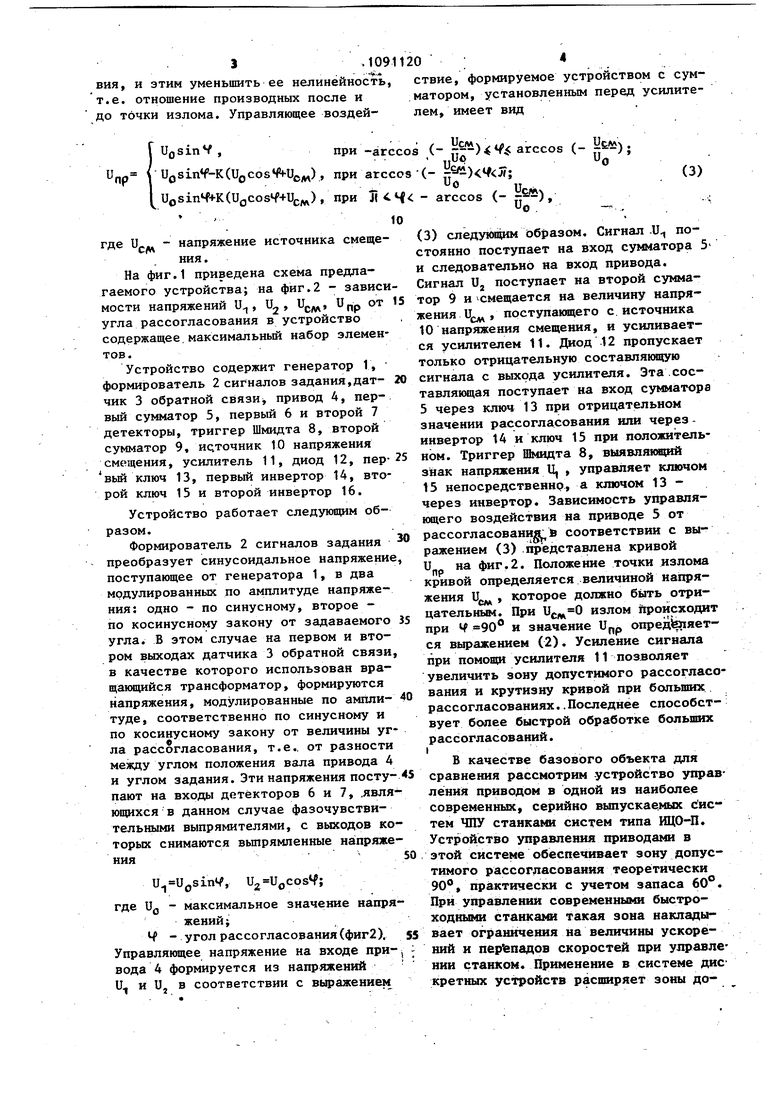
ВИЯ, и этим уменьшить ее нелинейность, т.е. отношение производных после и до точки излома. Управляющее воздей osin f ,при Uosin f-K(UoCos«ffUe), при Uosin4+K(UoCos4+Uc) , при . где U-.. - напряжение источника смещесгНа фиг.1 приведена схема предлагаемого устройства; на фиг.2 - зависи мости напряжений U, U , U, Unp от угла рассогласования в устройство содержащее максимальный набор элеменT,OB. Устройство содержит генератор 1, формирователь 2 сигналов задания,датчик 3 обратной связи привод 4, первый сумматор 5, первый 6 и второй 7 детекторы, триггер Шмидта 8, второй сумматор 9, источник 10 напряжения смещения, усилитель 11, диод 12, первый ключ 13, первый инвертор 14, второй ключ 15 и второй инвертор 16. Устройство работает следующим образом. Формирователь 2 сигналов задания преобразует синусоидальное напряжение поступающее от генератора 1, в два модулированных по амплитуде напряжения: одно - по синусному, второе по косинусному закону от задаваемого угла. В этом случае на первом и втором выходах датчика 3 обратной связи в качестве которого использован вращаю1цийся трансформатор, формируются напряжения, модулированные по амплитуде, соответственно по синусному и по косинусному закону от величины уг ла рассогласования, т.е.. от разности между углом положения вала привода 4 и углом задания. Эти напряжения поступают на входы детекторов 6 и 7, .явля ющихся в данном случае фазочувствительными выпрямителями, с выходов ко торых снимаются выпрямленные на1пряже ния. U U sin4, U.j UQCOs4; где UQ - максимальное значение напря жений; Ч - угол рассогласования {фиг2). Управляющее напряжение на входе привода 4 формируется из напряжений и и Uj в соответствии с выражением
.1091120 : 4 ствие, формируемое устройством с сумматором, установленным перед усилителем, имеет вид
(3) -arccos /- ™)4 arccos (- ); arcco9-(- )л; Ji 4 - arccos (- S.) , UQ 10 (3) следующим Ьбразом. Сигнал -U постоянно поступает на вход сумматора 5 и следовательно на вход привода. Сигнал и, поступает на второй сумматор 9 и смещается на величину напряжения U , поступакщего с источника 10 напряжения смещения, и усиливается усилителем 11. Диод 12 пропускает только отрицательную составляющую сигнала с выхода усилителя. Эта .составляющая поступает на вход сумматора 5 через ключ 13 при отрицательном значении рассогласования или через инвертор 14 и ключ 15 при положительном. Триггер Шмидта 8, выявляющий знак напряжения U, , управляет ключом 15 непосредственнр, а ключом 13 через инвертор. Зависимость управляющего воздействия на приводе 5 от . рассогласованиями соответствии с выРанением (3) представлена кривой и на фиг.2. Положение точки излома кривой определяется величиной напряжения IL.. , клторое должно быть отри f o излом йроисходит при ч 90 и значение Uf,p определяется выражением (2). Усиление сигнала при помощи усилителя 11 позволяет увеличить зону допустимого рассогласования и крутизну кривой при больших рассогласованиях. .Последнее способствует более быстрой обработке больших рассогласований. В качестве базового объекта для сравнения рассмотрим устройство управления приводом в одной из наиболее современных, серийно выпускае мых Систем ЧПУ станками систем типа ИЦО-П. Устройство управления приводами в этой системе обеспечивает зону допустимого рассогласования теоретически 90, практически с учетом запаса 60°. При управлении современными быстроходными станками такая зона накладывает ограничения на величины ускорений и перепадов скоростей при управлении станком. Применение в системе дис кретных устройств расширяет зоны до510
пустимого рассогласования неприемлемо из-за их низкой помехоустойчивости и нарушения устойчивости системы при некоторых скоростях. Применение предлагаемого устройства позволяет расширить эту зону до 150-170 , что в данном случае вполне достаточно. При этом не происходит ухудшения других параметров систе№ 1. f.
Применение предлагаеморЬ устройства в системе ЧПУ ИЦО-П позволяет увеличить производительность системы в среднем на 1% за счет увеличения ускорений и перепадов скоростей между , .соседними кадрами программы. Экономия
20«
за счет повьш1ения производительности в этом случае составит 420 рублей в год на систему при дополнительных затратах 75 рублей.
Технико-экономический эффект от применения предлагаемого устройства составит 345 рублей на систему в год. При планируемом выпуске систем в таком исполнении 70 единиц в год годовой экономический эффект составит 70x375 26 тыс. 250 руб. Кроме того, увеличение допустимьк перепадов скоростей позволит сократить число кадров в программе и упростить ее составление.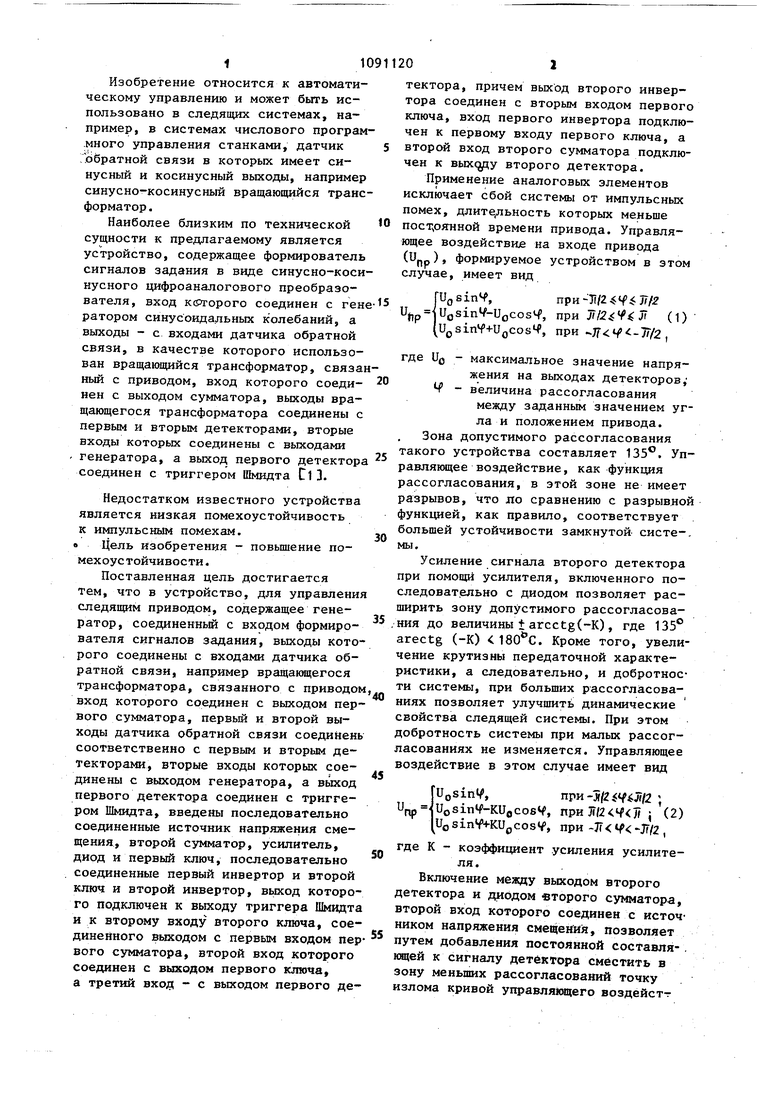
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления следящим приводом | 1982 |
|
SU1108389A1 |
| Устройство для управления следящим приводом | 1984 |
|
SU1187151A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1336241A1 |
| Устройство для формирования сигнала рассогласования | 1985 |
|
SU1317394A1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| Следящая система | 1987 |
|
SU1462236A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЛЕДЯЩИМ ПРИВОДОМ, содержащее генератор, соединенный с входом формирователя сигналов задания, выходы которого соединены с входами датчика обратной связи, например вращающегося трансформатора, связанного с приводом, вход которого соединен с выходом первого сумматора, первый и второй выходы датчика обратной связи соединены соответственно с первым и вторым детекторами, вторые входы которых о соединены с выходом генератора, а выход первого детектора соединен с триггером UbdgwTa, отличающее с я тем, что, с целью повышения помехоустойчивости, в него введены последовательно соединенные источник напряжения смещения, второй сумматор, усилитель, диод и первый ключ, последовательно соединенные первый инвертор и второй ключ и второй инвертор, выход которого подключен к выходу триггера Шмидта и к второму входу второго ключа, соединенного выходом с первым входом первого сумматора, второй вход которого соединен с выхог дом первого ключа, а третий вход - с выходом первого детектора, причем выход второго инвертора соединен с (Л вторым входом первого ключа, вход первого инвертора подключен к первому входу первого ключа, а второй вход сумматора подключен к выходу второго детектора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления следящим приводом | 1976 |
|
SU703781A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
