Изобретение относится к автоматическому управлению и может быть использовано в системах числового программного управления приводами, содержащими циклические датчики обратной . связи: вращающиеся трансформаторы, индуктосины и др.
Известно устройство, содержащее генератор, датчик обратной связи, детектор СИОднако данное устройство характеризуется низкой точностью и малой зоной допустимого рассогласования.
Наиболее близким к изобретению по технической сущности является устройство, содержащее генератор синусоидальных колебаний, выход которого соединен с входом цифроаналогового преобразователя, датчик обратной связи - вращающийся трансформатор, соединенный с приводом, вход которого соединен с выходом расширителя зоны допустимого рассогласования, детектор первый вход которого соединен с выходом датчика обратной связи, а вТорой - с выходом генератора. Расширитель зоны допустимого рассогласования включает в себя два триггера Шмидта, блок логики направления, реверсивный счетчик, дещифратор, блок согласования отсчетов и сумматор Г21.
Недостаток этого устройства - низкая точность, обусловленная тем, что устройство содержит датчик обратной связи с двумя выходами, например вращающийся трансформатор. Такие датчики обладают пониженной точностью.
Известны циклические датчики линейных и угловых перемещений, например линейные и круговые индуктосины, которые обладают большей точностью С 32.
Однако указанные датчики не могут быть использованы с известным устройством.
Целью изобретения является повышение точности путем расширения зоны допустимого рассогласования у датчиков, имеющих одну выходную об- мотку.
Поставленная цель достигается тем, что в устройство, содержащее генератор, выход которого соединен с входом цифроаналогового преобразователя, датчик обратной связи, соединенный с приводом, вход которого соединен с выходом расширитапя зоны допустимого рассогласования, детектор, первый вход которого соединен с выходом датчика обратной связи, а второй вход - с выходом генератора, введены шесть ключей, два инвертора, два запоминающих блока, счетчик и дешифратор, а датчик обратной связи выполнен в виде циклического датчика линейньгх или угловых перемещений типа индуктосин, причем синусный выход цифроаналогового преобразователя соединен с входами первого и второго ключей, а косинусный - с входами третьего ключа и первого инвертора, выход которого соединен с входом четвертого ключа, выходы первого и четвертого ключей соединены с синусным входом, а выходы второго и третьего ключей - с косинусным входом датчика обратной связи, выход детекTQpa соединен с входами пятого и шестого ключей, выходы которых соединены с входами первого и второго запоминающих блоков, выходы которых соединены с первым и вторым входами расширителя зоны допустимого рассогласования соответственно, выход генератора соединен с входом счетчика, выход которого соединен с дешифратором, выход которого соединен с управляющими входами первого, третьего и пятого ключей и с входом второго инвертора, вьогод которого соединен с управляющими входами второго, четвертого и шестого ключей.
. Л
Использование новых блоков и связей позволило в режиме разделения во времени при наличии одной выходной обмотки датчика обратной связи получить два сигнала рассогласования, сдвинуть1х один относительно дргого на угол 90 . Например, при амплитудном режиме питания на статорные обмотки датчика подаются напряжения
и и, sin sin чй t.
(1)
U- U cosf sin caJ t, где U(, Vf напряжения на статорных
обмотках,
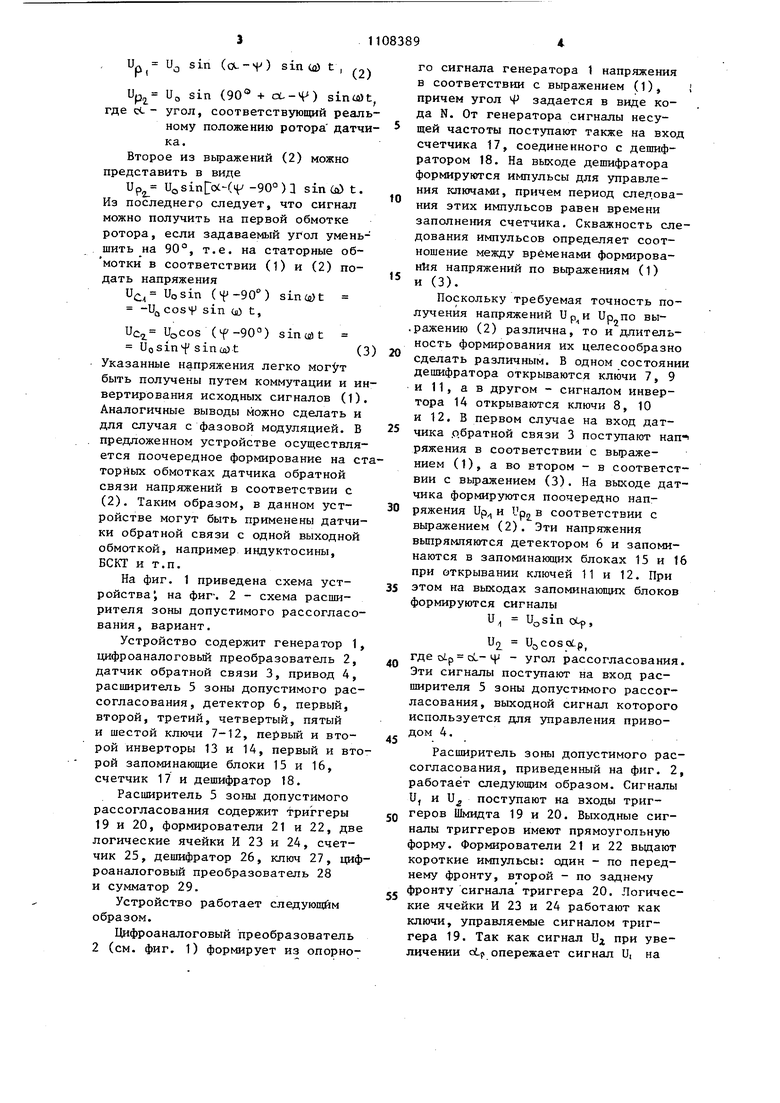
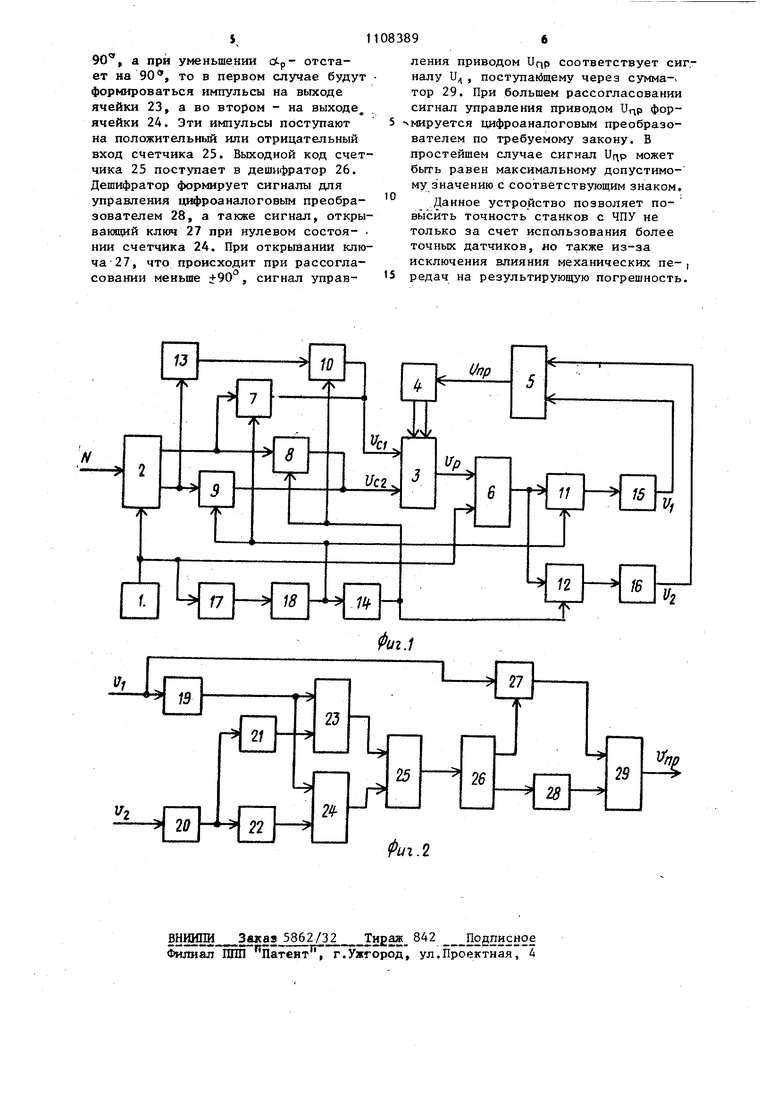
U-j vjO - амплитуда и частота несущего напряжения, V - задаваемый угол поворота ротора датчика. При зтом с выходных обмоток, сдвинутых в пространстве на 90, снимаются напряжения и, sin ((X-S) sin (a) t Up2 Uo sin (90° + ct-4) sintt)t где c. - угол, соответствующий реаль ному положению ротора датчи ка. Второе из выражений (2) можно представить в виде Up Uosin ;oc-(v -90°) Л sinCu) t. Из последнего следует, что сигнал можно получить на первой обмотке ротора, если задаваемый угол уменьшить на 90°, т.е. на статорные обмотки в соответствии (1) и (2) подать напряжения и Uosin (f-90°) sin( -UjjCosS sin oi) t, Uc2. Uocos (f-90°) sintdt Uosin f sincfljt( Указанные напряжения легко могУт быть получены путем коммутации и и вертирования исходных сигналов (1) Аналогичные выводы можно сделать и для случая с фазовой модуляцией. В предложенном устройстве осуществля ется поочередное формирование на с торйых обмотках датчика обратной связи напряжений в соответствии с (2). Таким образом, в данном устройстве могут быть применены датчи ки обратной связи с одной выходной обмоткой, например индуктосины, БСКТ и т.п. На фиг. 1 приведена схема устройства i на фиг-. 2 - схема расширителя зоны допустимого рассогласо вания, вариант. Устройство содержит генератор 1 цифроаналоговьй преобразователь 2, датчик обратной связи 3, привод 4, расширитель 5 зоны допустимого рас согласования, детектор 6, первый, второй, третий, четвертый, пятый и шестой ключи 7-12, первый и второй инверторы 13 и 14, первый и вт рой запоминающие блоки 15 и 16, счетчик 17 и дешифратор 18. Расширитель 5 зоны допустимого рассогласования содержит триггеры 19 и 20, формирователи 21 и 22, дв логические ячейки И 23 и 24, счетчик 25, дешифратор 26, ключ 27, ци роаналоговый преобразователь 28 и сумматор 29. Устройство работает следующим образом. Цифроаналоговый преобразователь 2 (см. фиг. 1) формирует из опорно го сигнала генератора 1 напряжения в соответствии с выражением (1), I причем угол ф задается в виде кода N. От генератора сигналы несущей частоты поступают также на вход счетчика 17, соединенного с дешифратором 18. На выходе дешифратора формируются импульсы для управления ключами, причем период следования этих импульсов равен времени заполнения счетчика. Скважность следования импульсов определяет соотношение между временами формирования напряжений по выражениям (1) и (3). Поскольку требуемая точность получения напряжений Up по выражению (2) различна, то и длительность формирования их целесообразно сделать различным. В одном состоянии дешифратора открываются ключи 7, 9 и 11, а в другом - сигналом инвертора 14 открываются ключи 8, 10 и 12. В первом случае на вход датчика р.братной связи 3 поступают нап ряжения в соответствии с выражением (1), а во втором - в соответствии с выражением (3). На выходе датчика формируются поочередно напряжения Up и Upj, в соответствии с выражением (2). Эти напряжения выпрямляются детектором 6 и запоминаются в запоминающих блоках 15 и 16 при открывании ключей 11 и 12. При этом на выходах запоминающих блоков формируются сигналы и оСр, И UoCosoLp где Ыр сз1-tp - угол рассогласования. Эти сигналы поступают на вход расширителя 5 зоны допустимого рассогласования, выходной сигнал которого используется для управления приводом 4. Расширитель зоны допустимого рассогласования, приведенный на фиг. 2, работает следующим образом. Сигналы и, и и поступают на входы триггеров Шмидта 19 и 20. Выходные сигналы триггеров имеют прямоугольную форму. Формирователи 21 и 22 вьщают короткие импульсы: один - по переднему фронту, второй - по заднему фронту сигнала триггера 20. Логические ячейки И 23 и 24 работают как ключи, управляемые сигналом триггера 19. Так как сигнал Uj при увеличении oLf опережает сигнал U, на
90, а при уменьшении oi-p- отстает на 90, то в первом случае будут формироваться импульсы на выходе ячейки 23, а во втором - на выходе, ячейки 24. Эти импульсы поступают на положительный или отрицательный вход счетчика 25. Выходной код счетчика 25 поступает в дешифратор 26. Дешифратор формирует сигналы для управления цифроаналоговым преобразователем 28, а также сигнал, открывакндий ключ 27 при нулевом состоя- НИИ счетчика 24. При открывании ключа 27, что происходит при рассогласовании меньше ±90, сигнал управения приводом Uqp соответствует сигналу Од, поступающему через сумма- тор 29. При большем рассогласовании сигнал управления приводом Unp формируется цифроаналоговым преобразователем по требуемому закону. В простейшем случае сигнал может быть равен максимальному допустимому значению с соответствующим знаком. Данное устройство позволяет повысить Точность станков с ЧПУ не только за счет использования более точных датчиков, но также из-за исключения влияния механических пе- , редач на результирующую погрешность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления следящим приводом | 1984 |
|
SU1187151A1 |
| Устройство для управления следящим приводом | 1982 |
|
SU1091120A1 |
| Устройство для управления следящим приводом | 1984 |
|
SU1182490A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2007027C1 |
| Устройство для управления следящим приводом | 1976 |
|
SU703781A1 |
| Многоканальное измерительное электролокационное устройство | 1988 |
|
SU1571528A1 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |
| Многоканальный преобразователь перемещения в код | 1985 |
|
SU1275751A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЛЕДЯЩИМ ПРИВОДОМ, содержащее генератор , выход которого соединен с входом цифроанапогового преобразователя, датчик обратной связи, соединенный- с приводом, вход которого соединен с выходом расширителя зоны допустимого рассогласования, детектор, первый вход которого соединен с выходом датчика обратной связи, а второй вход - с выходом генеотличающееся ратора. тем, что, с целью повышения точности путем расширения зоны допустимого рассогласования, в него введены шесть ключей, два инвертора, два запоминающих блока, счетчик и дешифратор, а датчик обратной связи. вьшолнен в виде циклического датчика перемещений, например индуктосина, причем синусный выход цифроаналогового преобразователя соединен с входами первого и второго ключей, а косинусный - с входами третьего ключа и первого инвертора, выход которого соединен с входом четвертого ключа, выходы первого и четвертого ключей соединены с синусным входом, а выходы второго и третьего ключей - с косинусным входом датчика обратной связи, выход детектора соединен с входами пятого и шестого ключей, выходы которых сое(Л динены с входами первого и второго запоминакнцих блоков, выходы котос рых соединены с первым и вторым вхо§ дами расширителя -зоны допустимого рассогласования соответственно, выход генератора соединен с входом счетчика, выходы которого соедине 1ы с дешифратором, выход которого соединен с управляющими входами перво- . го, третьего и пятого ключей и с 00 выходом второго инвертора, выход со которого соединен с управляющими 00 входами второго, четвертого и шесqp того ключей.
Vf
г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фазовая следящая система | 1979 |
|
SU796787A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Индукционные преобразователи информации | |||
| Л., 1981, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
