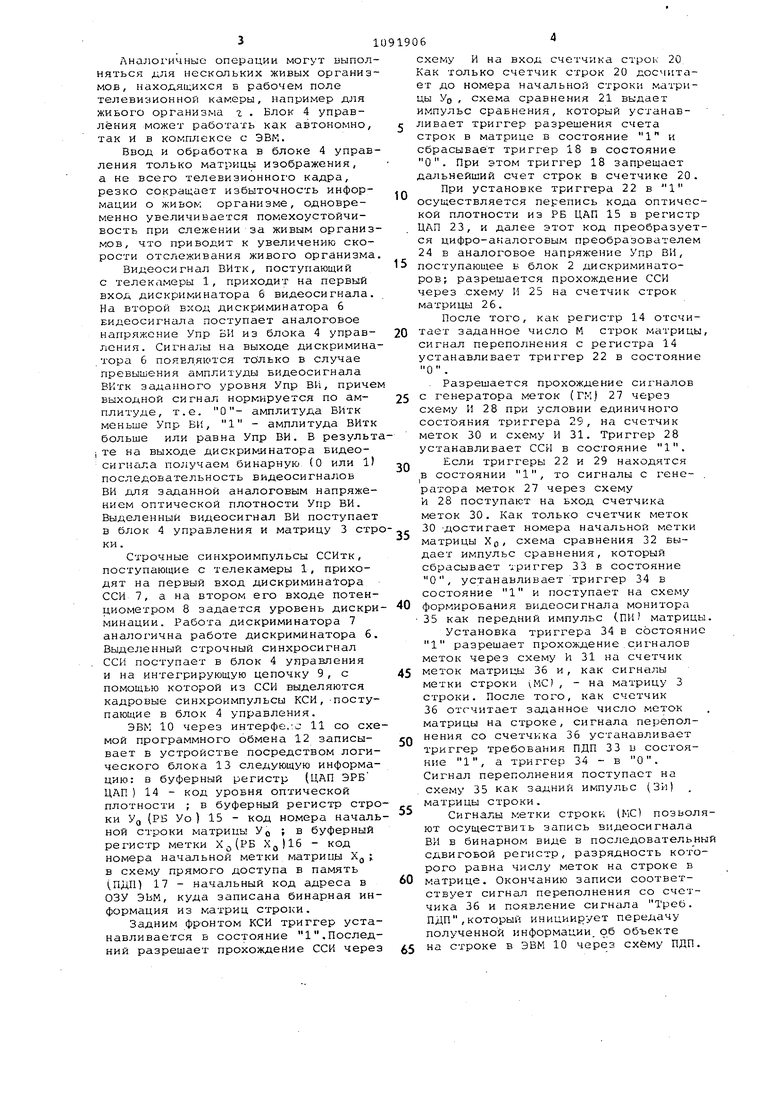
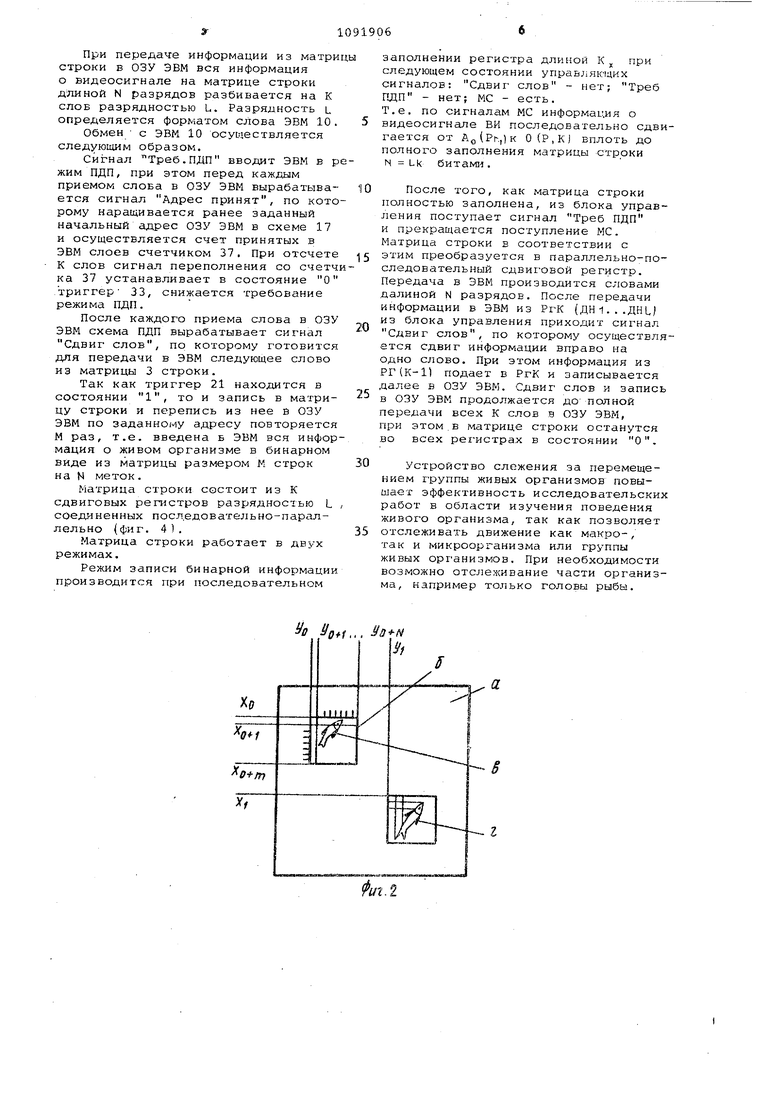
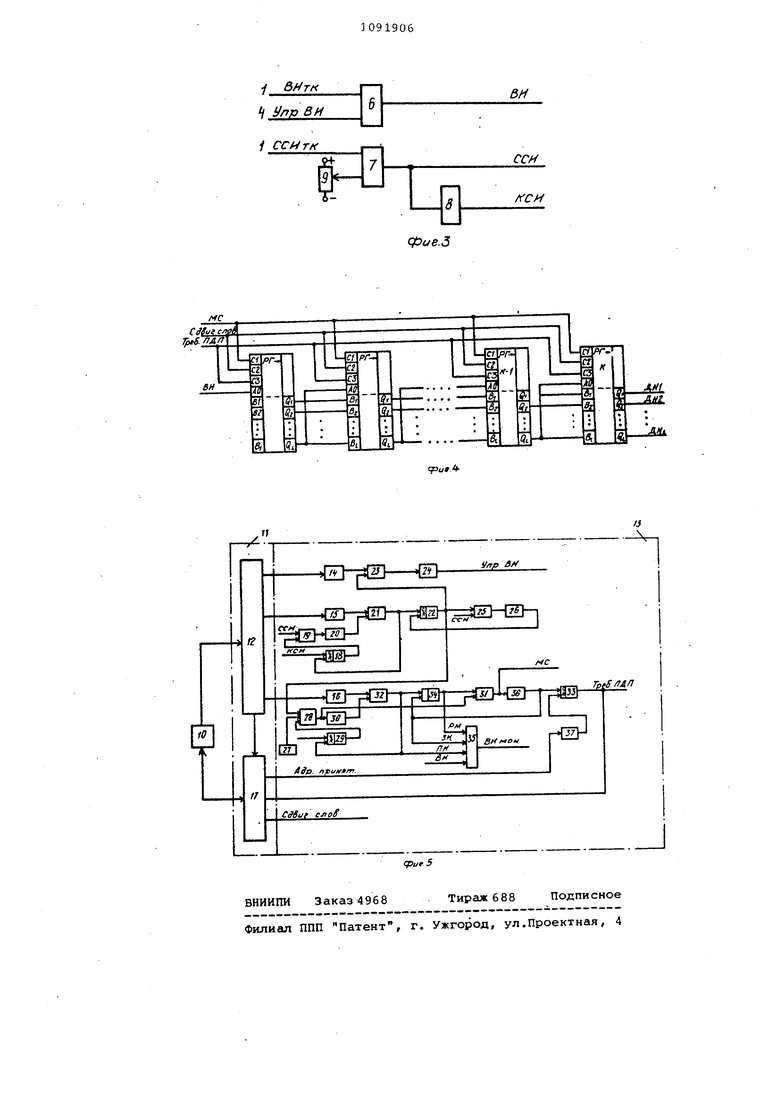
Изобретение относится к технике измерения координат движущихся жив организмов и может быть применено при изучении двигательной активнос одного или группы живых организмов например рыб, Известно устройство слежения за перемещением животных, в котором применяются ионные датчики и электронная пластика, заряженная отриц тельно. При приближении к ионному датчику животного на его поверхнос индуцируется- положительный заряд. При этом, в результате электрическ индукции, вызывается лавинная иони зация 1аза датчика и происходит тл щий разряд, импульс которого после усиления поступает в блок вычислен ,и после обработки в нем - на регис ратор 1 . Однако данное устройство позволяет отслеживать перемещение только одного животного и характеризуется низкой точностью из-за невысокой помехозащищенности. Наиболее близким к предлагаемому по технической сущности является видеосканнер для регистрации локомо торной активности мелких животных, состоящий из телевизионной камеры и блока слежения, который перемещается над специальной ареной с помощью электромоторов, управляемых электронной схемой, регистрирующей место на сождения одного животного в каждый данный момент 21. Недостатками данного устройства являются низкая скорость слежения за перемещением одного животного, невозможность одновременного отслеж вания группы животных, пониженная помехозащищенность, т.е. невысокая точность отслеживания. Цель изобретения - повьЕьение точности отслеживания группы органи мов . Поставленная цель достигается тем, что в устройстве для слежения за движением живых организмов, содержащем телевизионную камеру и блок слежения, блок слежения выполнен в виде последовательно соединен ных блока дискриминаторов, матрицы строки блока управления и монитора причем второй выход блока управления соединен с вторым входом блока дискриминаторов. При этом блок дискриминаторов .содержит дискриминатор видеосигнала и последовательно соединенные блок задания пороговогО напряжения, дискриминатор строчных синхроимпуль сов и интегрирующую цепь. Матрица строки содержит К сдвиг Еых регистров, соединенных последовательно-параллельно . Блок управления содержит последо вательно соединенные ЭВМ, интерфейс и логический блок, причем интерфейс содержит блок программно1о обмена и блок прямого доступа в память. На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - схематическое изображение анализируемого кадра; на фиг. 3 функциональная схема блока дискриминаторов; на фиг. 4 - функциональная схема матрицы строки; на фиг.5 функциональная схема блока управления . Полный телевизионный сигнал, поступающий из телекамеры 1, обрабатывается блоком 2 дискриминаторов с целью вьзделения кадровых и строчных синхроимпульсов, необходимых дляработы матрицы 3 строки и блока 4 управления. Б блоке 2 дискриминаторов по заданным из блока 4 управления уровням оптической плотности происходит выделение видеосигнала в бинарном виде по строке. Возмож1юсть автоматической установки уровня оптической плотности в блоке 2 дис-кримйна1оров позво.пяет резко увеличить помехозащищенность выделения исследуемого живого организма эа счет автоматического выбора наиболее оптимального в этом смысле уровня дискриминации исследуемого живого органиэма. Визуализация бинарной матрицы изображения живого организма осуществляется при помощи стандартного монитора 5, Заданный блоком 4 управления интервал части бинс.рной информации по меткам на строке Уо...Уо+h заносится со скоростью поступления из телевизионной камеры в последовательный СДВИГОВОЙ регистр матрицы 3 строки. По окончании заполнения бинарная информация из матрицы 3 строки преобразуется из последовательного в последовательнопаралле льный код и передается для предварительной обработки Е блок 4 управления. Аналогично производится ввод всей матрицы изображения q размером NM в блок управления со всего телевизионного кадра 6 по заданным строкам Хо...Хо+м. Блок 4 управления обрабатывает бинарную матрицу изображения с целью определения характерных точек живого организма, например для рыбы центр тяжести, голову, хвост, по которым в дальнейиюм отслеживается движение живого организма в. При определении характерных точек живого организма в следующем кадре блок управ;1ения по ним прогнозирует направ;1ение перемещения живого организма и, соответственно, устанавливает для следующего кадра координав рабочем поле телевизионты Х i ной к; 3 Лнало1ичные операции могут выпол няться АЛЯ нескольких живых организ мов, находя11;ихся Б рабочем поле телевизионной камеры, например для живого организма г . Блок 4 управления может работать как автономно, так и в комплексе с ЭВМ. Ввод и обработка в блоке 4 управ ления только матрицы изображения, а не всего телевизионного кадра, резко сокращает избыточность информации о живом организме, одновременно увеличивается помехоустойчивость при слежении за живым организ мов, что приводит к увеличению скорости отслеживания живого организма Видеосигнал ВИтк, поступающий с телекамеры 1, приходит на первый вход дискриминатора 6 видеосигнала На второй вход дискриминатора 6 видеосигнала поступает аналоговое напряжение Упр БИ из блока 4 управления. Сигналы на выходе дискримина тора 6 появдяются только в случае превышения амплитуды видеосигнала ВКтк заданного уровня Упр ВИ, приче выходной сигнал нормируется по амплитуде, т.е. амплитуда ВИтк меньше Упр ВИ, 1 - амплитуда ВИтк больше или равна Упр ВИ. В результ 1 те на выходе дискриминатора видеосигнала получаем бинарную (О или 1 последовательность видеосигналов ВИ для заданной аналоговым напряжением оптической плотности Упр ВИ. Выделенный видеосигнал ВИ поступает в блок 4 управления и матрицу 3 стр ки . Строчные синхроимпульсы ССИтк, поступающие с телекамеры 1, приходят на первый вход дискриминатора ССИ 7, а на втором его входе потен циометром 8 задается уровень дискри минации. Работа дискриминатора 7 аналогична работе дискриминатора 6 Выделенный строчный синхросигнал ССИ поступает в блок 4 управления и на интегрирующую цепочку 9, с помощью которой из ССИ выделяются кадровые синхроимпульсы КСИ,-посту пающие в блок 4 управления. ЭВК 10 через интерфе. 11 со сх мой программного обмена 12 записывает в устройстве посредством логи ческого блока 13 следующую информа цию: в буферный регистр (ЦАП ЭРЕ ЦАП ) 14 - код уровня оптической плотности ; в буферный регистр стр ки УО (РБ Уо ) 15 - код номера начал ной строки матрицы У ; в буферный регистр метки X(PB XgjlS - код номера начальной метки матрииь XQ ; в схему прямого доступа в память (.ПДП) 17 - начальный код адреса в ОЗУ ЭВМ, куда записана бинарная ин формация из матриц строки. Задним фронтом КСИ триггер уста навливается в состояние 1.Послед ний разрешает прохождение ССИ чере 6 схему И на вход счетчика строк 20 Как только счетчик строк 20 досчитает до номера начальной строки матрицы УО , схема сравнения 21 выдает импульс сравнения, который устанавливает триггер разрешения счета строк в матрице в состояние 1 и сбрасывает триггер 18 в состояние О. При этом триггер 18 запрещает дальнейший счет строк в счетчике 20. При установке триггера 22 в 1 осуществляется перепись кода оптической плотности из РБ ЦАП 15 в регистр ЦАП 23, и далее этот код преобразуется цифро-аналоговым преобразователем 24 в аналоговое напряжение Упр ВИ, поступающее Б блок 2 дискриминаторов; разрешается прохождение ССИ через .схему И 25 на счетчик строк матрицы 26. После того, как регистр 14 отсчитает заданное число М строк матрицы, сигнал переполнения с регистра 14 устанавливает триггер 22 в состояние О. Разрешается прохождение сигналов с генератора меток (ГМ) 27 через схему И 28 при условии единичного состояния триггера 29, на счетчик меток 30 и схему И 31. Триггер 28 устанавливает ССИ в состояние 1. Если триггеры 22 и 29 находятся в состоянии 1, то сигналы с генератора меток 27 через схему И 28 поступают на вход счетчика меток 30. Как только счетчик меток 30 -достигает номера начальной метки матрицы Хд, схема сравнения 32 выдает импульс сравнения , который сбрасывает триггер 33 в состояние О, устанавливает триггер 34 в состояние 1 и поступает на схему формирования видеосигнала монитора 35как передний импульс (ПИ матрицы. Установка триггера 34 в состояние 1 разрешает прохождение.сигналов меток через схему И 31 на счетчик меток матрицы 36 и, как сигналы метки строки иМС), - на матрицу 3 строки. После того, как счетчик 36отсчитает заданное число меток матрицы на строке, сигнала переполнения со счетчика 36 устанавливает триггер требования ПДП 33 Б состояние 1, а триггер 34 - в О. Сигнал переполнения поступает на схему 35 как задний импульс (ЗИ) , матрицы строки. Сигналы метки строки (МС) позволяют осуществить запись видеосигнала ВИ в бинарном виде в последовательный сдвиговой регистр, разрядность которого равна числу меток на строке в матрице. Окончанию записи соответствует сигнал переполнения со счетчика 36 и появление сигнала Треб. ПДП,который инициирует передачу полученной информации, об объекте на строке в ЭВМ 10 через схему ПДП.
При передаче информации из матри строки в ОЗУ ЭВМ вся информация о видеосигнале на матрице строки длиной N разрядов разбивается на К слов разрядностью L. Разрядность и определяется форматом слова ЭВМ 10.
Обмен/ с ЭВМ 10 осуществляется следующим образом.
Сигнал Треб.ПДП вводит ЭВМ в ржим ПДП, при этом перед каждым приемом слова в ОЗУ ЭВМ вырабатывается сигнал Адрес принят, по которому наращивается ранее заданный начальный адрес ОЗУ ЭВМ в схеме 17 и осуществляется счет принятых в ЭВМ слоев счетчиком 37. При отсчете К слов сигнал переполнения со счетчка 37 устанавливает в состояние О /триггер 33, снижается требование режи ма ПДП.
После каждого приема слова в ОЗУ ЭВМ схема ПДП вырабатывает сигнал Сдвиг слов, по которому готовится для передачи в ЭВМ следующее слово из матрицы 3 строки.
Так как триггер 21 находится в состоянии 1, то и запись в матрицу строки и перепись из нее в ОЗУ ЭВМ по заданному адресу повторяется М раз, т.е. введена в ЭВМ вся информация о живом организме в бинарном виде из м.атрицы размером М строк на N меток.
Матрица строки состоит из К сдвиговых регистров разрядностью L соеди н е и ных последо в ател ь но-п араллельно (фиг. 4).
Матрица строки работает в двух режимах.
Режим записи бинарной информации производится при последовательном
ff ,.. У)
)(о
заполнении регистра длиной К при следующем состоянии управляющих сигналов: Сдвиг слов - нет; Треб ПДП - нет; МС - есть. Т.е. по сигналам МС информация о видеосигнале ВИ последовательно сдвигается от АО(РГ.,)К 0{Р,К) вплоть до полного заполнения матрицы строки N Lk битами.
После того, как матрица строки полностью заполнена, из блока управления поступает сигнал Треб ПДП и прекращается поступление МС. Матрица строки в соответствии с этим преобразуется в параллельно-последовательный сдвиговой регистр. Передача в ЭВМ производится словами далиной N разрядов. После передачи информации в ЭВМ из РгК (ДН1...ДН1| из блока управления приходит сигнал Сдвиг слов, по которому осуществляется сдвиг информации вправо на одно слово. При этом информация из РГ(к-1) подает в РгК и записывается далее в ОЗУ ЭВМ. Сдвиг слов и запись в ОЗУ ЭВМ продолжается до полной передачи всех К слов в ОЗУ ЭВМ, при этом, в матрице строки останутся во всех регистрах в состоянии О.
Устройство слежения за перемещением группы живых организмов повышает эффективность исследовательски работ в области изучения поведения живого организма, так как позволяет отслеживать движение как макро-, так и микроорганизма или группы живых организмов. При необходимости возможно отслеживание части организма, например только головы рыбы.
фие.З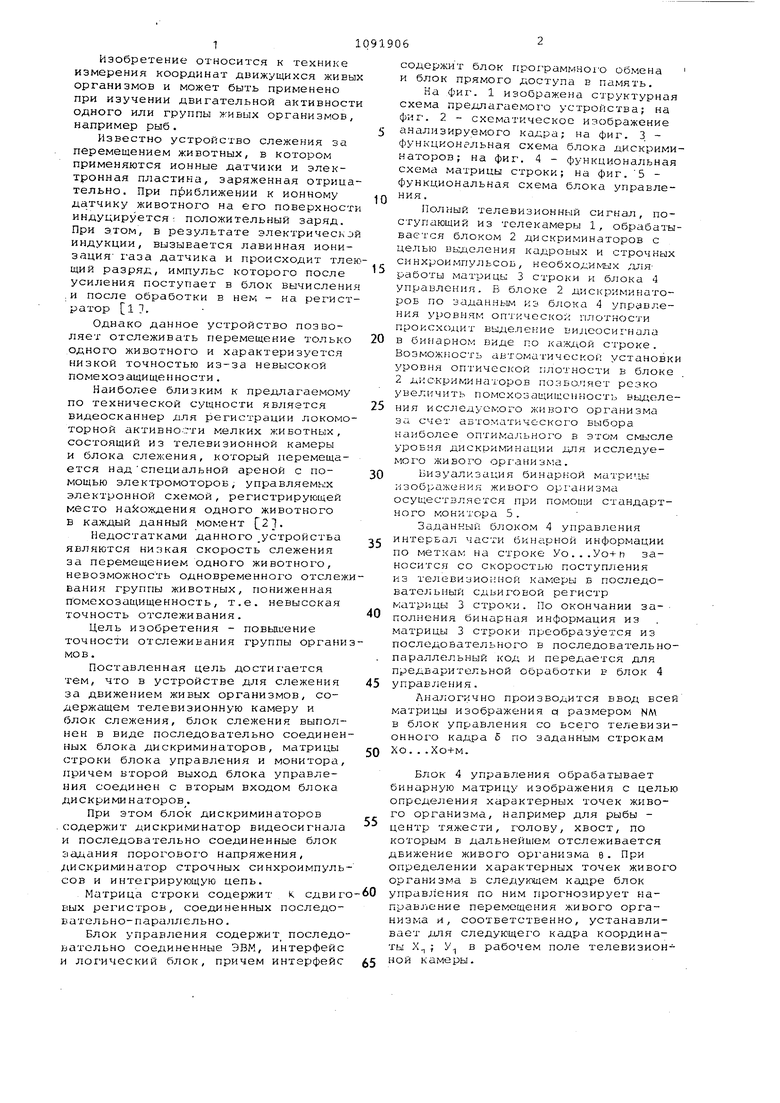
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| ТЕЛЕВИЗИОННАЯ ЦИФРОВАЯ СИСТЕМА ДЛЯ ДИАГНОСТИКИ ПАРАМЕТРОВ ПУЧКОВ | 1989 |
|
SU1732781A1 |
| Устройство для считывания изображений | 1985 |
|
SU1251135A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1992 |
|
RU2045781C1 |
| Устройство для селекции изображений объектов | 1986 |
|
SU1464183A1 |
| Устройство для ввода информации | 1988 |
|
SU1536368A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ | 1992 |
|
RU2051416C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162248C2 |
| Устройство для отображения информации | 1991 |
|
SU1809460A1 |
1. УСТРОЙСТВО ДЛЯ СЛЕЖЕНИЯ ЗА ДВИЖЕНИЕМ ЖИВЫХ ОРГАНИЗМОВ, содержащее телевизионную камеру и блок слежения, отлич-ающееся тем, что, с целью повышения точности отслеживания группы организмов, блок слежения выполнен в виде последовательно соединенных блока дискриминаторов, матрицы строки блока управления и монитора, причем второй выход блока управления соединен с вторым входом блока дискрикмнаторов. 2.Устройство по п. 1, отличающееся тем, что блок дискриминаторов содержит дискриминатор видеосигнала и последовательно соединенные блок задания порогового напряжения, дискриминатор строчных синхроимпульсов и интегрирующую цепь. 3.Устройство по п. 1, отличающееся тем, что матрица строки содержит К-сдвиговых регистров , соединенных последовательнопараллельно. 4.Устройство по п. 1, отли(Л чающееся тем, что блок управления содержит последовательно сос: единенные ЭВМ, интерфейс и логический блок, причем интерфейс содержит блок программного обмена и блок прямого доступа в память.. .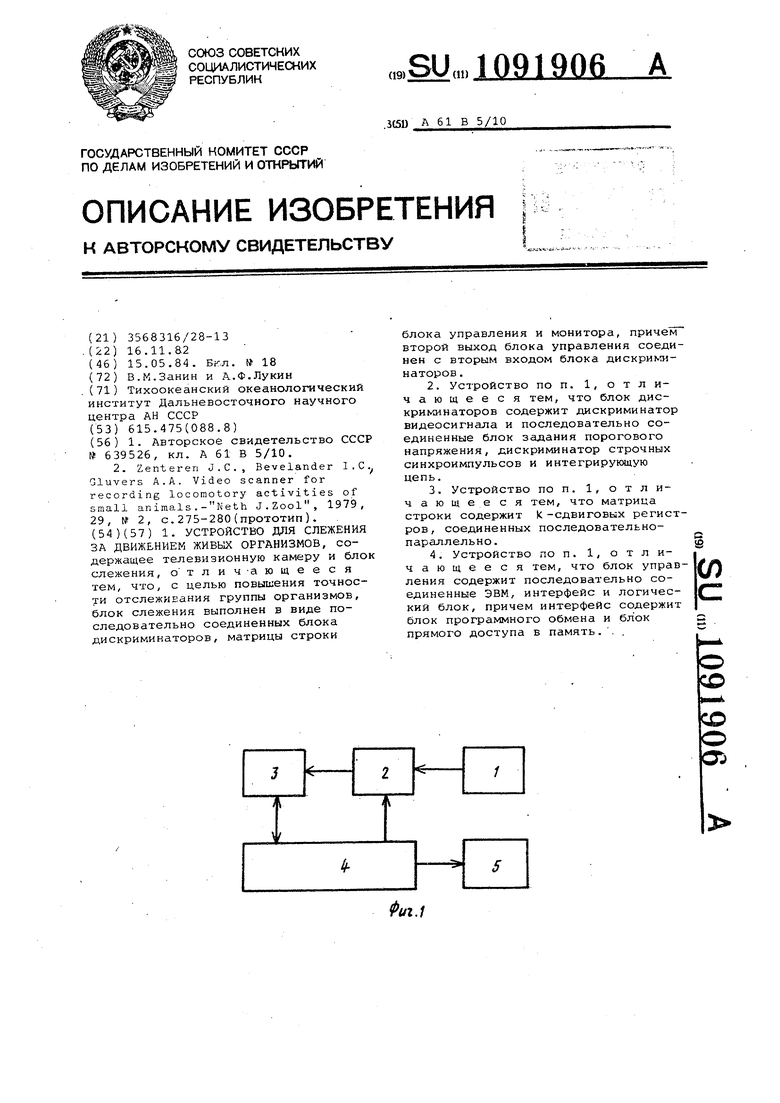
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство слежения за перемещением животных | 1977 |
|
SU639526A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Zenteren J.C., Bevelander I.С | |||
| Gluvers А.А | |||
| Video scanner for recording locomotory activities of small animals | |||
| J.Zool, 1979, 29, № 2, c.275-280(прототип). | |||
