Изобретение относится к автоматике и может быть нспользовано в электрогидравлических системах автоматического регулирования.
Известна система автоматического управления, содержащая датчик выходной .координаты и входное устройство, на которое подано управляющее воздействие, а также содержащая механические упоры, ограничивающие диапазон изменения выходной координаты ГПXI
Недостаток известной системы заключается в ее малой надежности.
Наиболее близкой пд технической сущности к изобретению является система, содержащая усилитель мощности, выход которого соединен с исполнительным органом, кинематически соединенным с индукционным датчиком положения, состоящим из сигнальной обмотки и обмотки возбуждения, первый вып вод которой соединен с источником переменного напряжения, а второй вывод - с шиной нулевого потенциала и с одним из выаодов сигнальной обмотки инд.укционного датчика положения, другой вывод которой подключен через первый ограничивающий элемент к входу первого суммирующего усилителя, подсоедннекному к первому выводу первой диагонали диодного моста и через второй ограничивающий элемент - к выходу второго суммирующего усилителя, вход которого соединен через третий ограничивающий элемент с источником сигнала управления и через четвертый ограничивающий элемент - с выходом первого суммирующег усилителя, а второй вывод первой диагонали диодного моста подключен через пятый ограничивающий элемент к выходу первого суммирующего усилите, ля Г23 ,
Недостатками данной системы являются малая точность и сложность,
Цель изобретения - повышение точности и надежности системы.
Указанная Цель достигается тем, что в систему дополнительно введены управляемый источник тока и демодулятор, первый и второй входы которого соединены соответственно с источниJCOM переменного напряжения и с выхо ioм второго суммиру1ощего усилителя, а выход - с входом усилителя мощноети, вход управляемого источника тока соединен с источником переменного напряжения, а первый и второй выходы
с соответствующими выводами второй диагонали диодного моста.
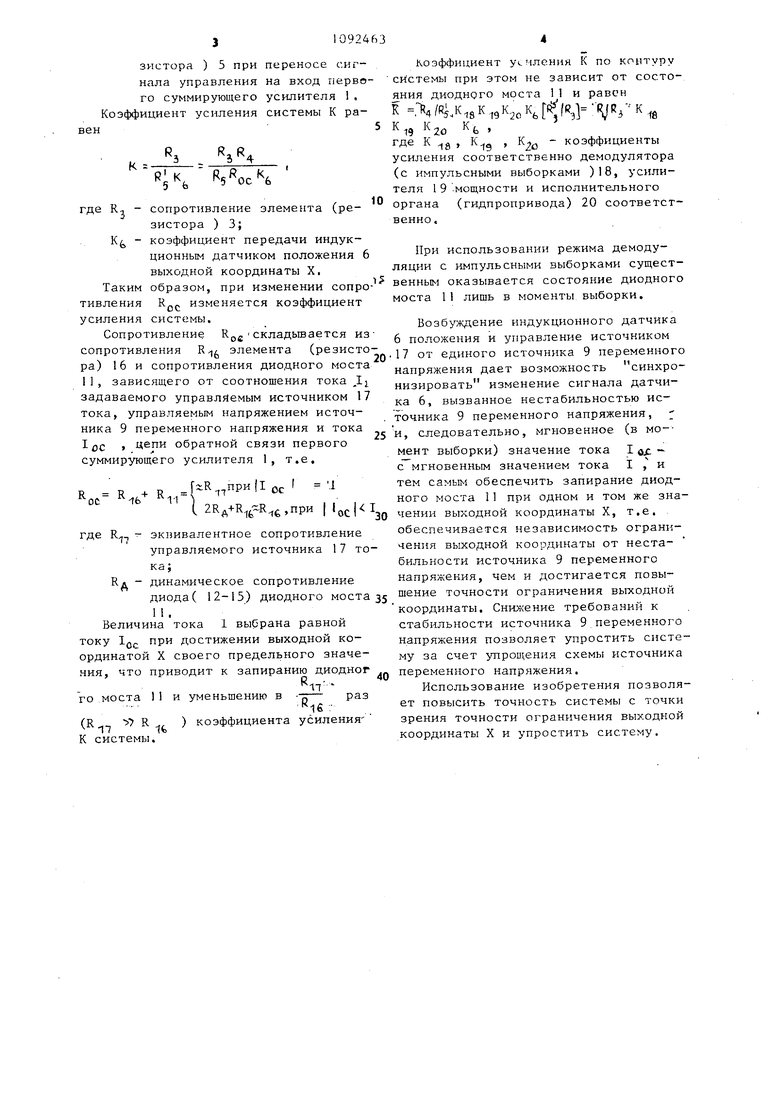
Кроме того, в качестве управляемого источника тока используются дополнительный ограничивающий элемент и одна из сигнальных обмоток индукционного датчика положения, первый вывод которой подключен через дополнительный ограничивающий элемент к первому выводу второй диагонали диодного моста, а второй вьшод - к второг му выводу второй диагонали диодного моста.
На фиг.1 представлена схема предлагаемой системы; на фиг. 2 - вариант исполнения системы (в качестве управляемого источника тока используются дополнительный ограничивающий элемент и одна из сигнальных обмоток индукционного датчика положения).
Система содержит первый и второй суммирующие усилители 1 и 2, первый второй и третий ограничивающие элементы (резисторы) 3,4 и 5, индук ционный датчик 6 положения, состоящий из обмотки 7 возбуждения и сигнальной обмотки 8, источник 9 переменного напряжения, четвертый ограничивающий элемент (резистор ) 10 0 диодный мост I1, состоящий из диодов 12-15, пятый ограничивающий элемент (резистор) 16, управляемый источник 17 тока, демодулятор ( с импульсными выборками) 18, усилитель 19 мощности, исполнительный орган (гидропривод) 20, источник 21 сигнала управления, дополнительный ограничивающий элемент 22(фиг.2) и сигнальная обмотка 23 индукционного датчика положения, образующие управляемый источник 17 выходная координата X.
Система работает следующим образом
Перенесем условно источник 21 сигнала управления на вход первого суммнрующего усилителя 1. При этом для сохранения коэффициента усиления системы необходимо изменить величину элемента 5.
ос
RUR
: 5 R.,0
Rjj,;- сопротивление цепи обратной связи первого суммирующего усилителя 1; - сопротивления соответственно
ю
элементов 5 и 10. сопротивление элемента (резистора ) 5 при переносе сигнала управления на вход перво го суммирующего усилителя 1, Коэффициент усиления системы К равенгде Rj - сопротивление элемента (резистора ) 3; К - коэффициент передачи индукционным датчиком положения выходной координаты X. Таким образом, при изменении сопр тивления , изменяется коэффициент усиления системы. Сопротивление R gскладьшается и сопротивления R,, элемента (резист ра) 16 и сопротивления диодного мост 11, зависящего от соотношения тока 1 задаваемого управляемым источником 1 тока, управляемым напряжением источника 9 переменного напряжения и тока I ос обратной связи первого суммирующего усилителя 1, т.е. с. ( 2Rд+R.R,g,пpи МосК где R - эквивалентное сопротивление управляемого источника 17 то ка ; Rд - динамическое сопротивление диода( 12-15) диодного моста 11. Величина тока 1 выбрана равной току IQ при достижении выходной координатой X своего предельного значения, что приводит к запиранию диодног го .моста 11 и уменьшению в (R R ) коэффициента усиления К системы. Коэффициент усиления К по контуру системы при этом не зависит от состоя ния диодного моста 1 1 и равен R % /R;.K,8 к ,дК2, к, -(у из к lfi к д к 20 к , где К .д , , - коэффициенты усиления соответственно демодулятора (с импульсными выборками )18, усилителя 19 .мощности и исполнительного органа (гидпроцривода) 20 соответственно , При использовании режима демодуляции с импульсными выборками существенным оказывается состояние диодного моста 11 лишь в моменты выборки. Возбуждение индукционного датчика 6 положения и управление источником l7 от единого источника 9 переменного напряжения дает возможность синхронизировать изменение сигнала датчика 6, вызванное нестабильностью источника 9 переменного напряжения, ;; и, следовательно, мгновенное (в мо-мент выборки) значение тока I о с мгновенным значением тока I , и тем самым обеспечить запирание диодного моста 11 при одном и том же значении выходной координаты X, т.е. обеспечивается независимость ограничения выходной координаты от нестабильности источника 9 переменного напряжения, чем и достигается повышение точности ограничения выходной координаты. Снижение требований к стабильности источника 9 переменного напряжения позволяет упростить систему за счет упроп ения схемы источника переменного напряжения. Использование изобретения позволяет повысить точность системы с точки зрения точности ограничения выходной координаты X и упростить систему. фуг./ CZ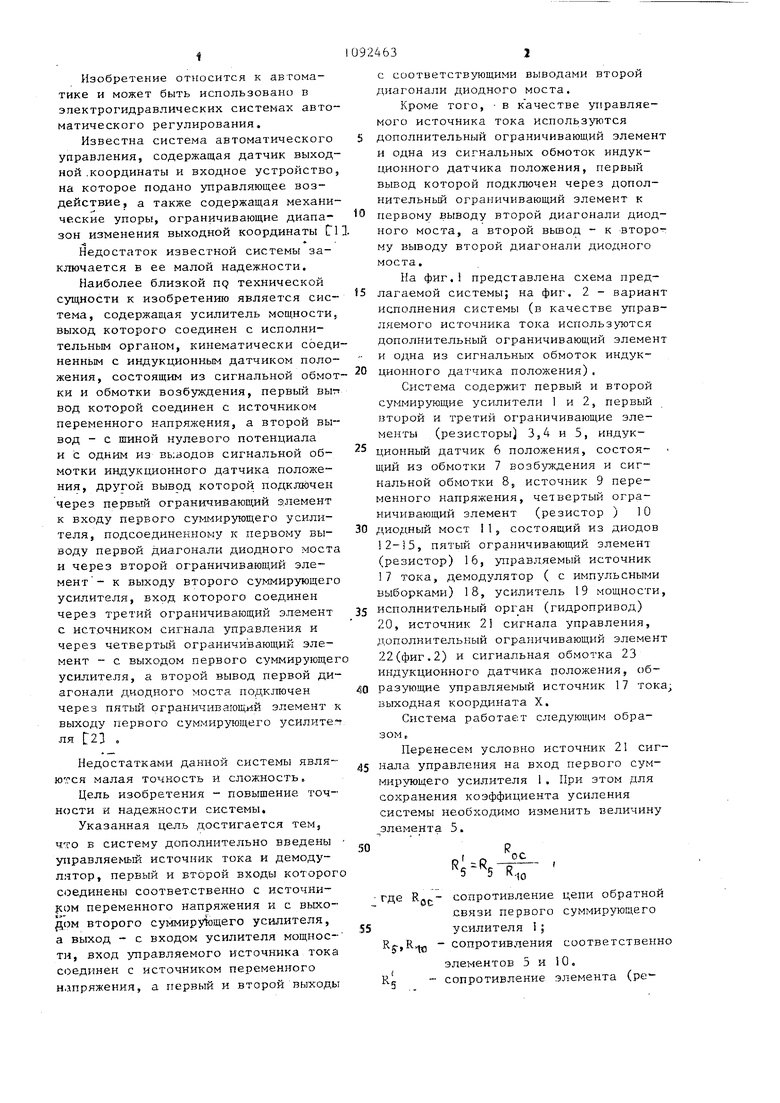
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный преобразователь с гальваническим разделением цепей | 1980 |
|
SU924588A1 |
| Преобразователь постоянного напряжения в квазисинусоидальное переменное | 1984 |
|
SU1365304A1 |
| Устройство для регулирования технологических параметров | 1980 |
|
SU959046A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Преобразователь активного сопротивления в постоянный ток | 1972 |
|
SU437981A1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| Измерительный преобразователь постоянного тока | 1984 |
|
SU1253306A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1971 |
|
SU298922A1 |
| ЭЛЕКТРОГРАВИРОВАЛЬНАЯ МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ РЕЛЬЕФНЫХ ПЕЧАТНЫХ ФОРМ | 1956 |
|
SU112764A1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2042115C1 |
1. СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ, содержащая усилитель мощности, выход которого соединен с исполнительным органом, кинематически соединенным с индукционным датчиком положения, состоящим из сигнальной обмотки и обмотки возбуждения, первый вывод которой соединен с источником переменного напряжения, а второй вывод - с шиной нулевого потенциала и с одним из; выводов сигнальной обмотки индукционного датчика положения, другой вывод которой подключен через первый ограничивающий элемент к входу первого суммирующего усилителя, подсоединенному к первому выводу первой диагонали диодного моста и через второй ограничивающий элемент - к выходу второго суммирующего усилителя, вход которого соединен через третий ограничивающий элемент с источником сигнала управления и через четвертый ограничивающий элемент - с выходом первого суммирующего усилителя, а второй вывод первой диагонали диодного моста подключен через пятый ограничивающий элемент к выходу первого суммирующего усилителя, отличающаяся тем, что, с целью повьш1ения точности и надежности системы, она содержит управляемый источник тока и демодулятор, первый и BTOpoii ,о;)ы которого соединены соответсгвенно с источником переменного напряжения и с выходом i второго суммирчтощего усилитс-ля, а выход - с входом усилителя моншости, (Л вход управляемого источника тока соединен с источником переменного напряжения, а первый и вчОрой выходы - с соответствующими выводами второй диагонали диодного моста. 2. Система по п.1, отличающая с я тем, что в качестве управляемого источника тока используются дополнительный ограничивающий элемент и одна из сигнальных обмоток индукционного датчика положения, ,первый вывод которой подключен через дополнительный ограничивающий элемент к первому выводу второй диагонали диодного моста, а второй вывод к второму выводу второй диагонали диодного моста.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Хохлова В.Л | |||
| и др | |||
| Электрогидравлические следящие системы., М., Машиностроение, 1971, с | |||
| Прибор для определения при помощи радиосигналов местоположения движущегося предмета | 1921 |
|
SU319A1 |
| Способ закалки пил | 1915 |
|
SU140A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Следящие приводы | |||
| Под ред | |||
| д.т.и | |||
| проф | |||
| Б.К.Чемоданова, М., Энергия, 1976, кн.2, с | |||
| ПЕЧНОЙ ЖЕЛЕЗНЫЙ РУКАВ (ТРУБА) | 1920 |
|
SU199A1 |
