Изобретение относится к области приборостроения, а именно к устройствам для определения курса подвижных объектов.
Известна курсовая система [1], содержащая гироскопический датчик направления и датчик магнитного курса.
Наиболее близкой по технической сущности является курсовая система [2], содержащая установленную в основании гироскопическую систему с гироскопом, вектор кинетического момента ротора которого расположен в горизонтальной плоскости, следящую систему стабилизации горизонта с первым усилителем и первым двигателем, следящую систему стабилизации курса с вторым усилителем и вторым двигателем, устройство горизонтальной коррекции с жидкостным маятниковым датчиком (ЖМД), задатчик широтной коррекции, задатчик компенсации дрейфа гироскопа, устройства отключения горизонтальной коррекции и магнитной коррекции курса с датчиком выключения коррекции, устройство магнитной коррекции курса с индукционным датчиком, устройством компенсации магнитной девиации и устройством компенсации инструментальных погрешностей, первый синусно-косинусный вращающийся трансформатор (СКВТ) по оси крена-тангажа, второй СКВТ по оси курса, задатчик магнитного склонения, переключатель "гиромагнитный курс - гирополукомпасный курс" (ГМК-ГПК), переключатель "гиромагнитный курс - магнитный курс" (ГМК-МК).
Недостатком такой курсовой системы является громоздкость конструкции, вызванная сложностью устройств преобразования информации.
Техническим результатом изобретения является уменьшение габаритов и массы курсовой системы, расширение функциональных возможностей, повышение быстродействия курсовой системы и упрощение эксплуатации.
Данный технический результат достигается в курсовой системе, содержащей установленную в основании гироскопическую систему с гироскопом, вектор кинетического момента ротора которого расположен в горизонтальной плоскости, следящую систему стабилизации горизонта с первым усилителем и первым двигателем, следящую систему стабилизации курса с вторым усилителем и вторым двигателем, устройство горизонтальной коррекции с жидкостным маятниковым датчиком (ЖМД), задатчик широтной коррекции, задатчик компенсации дрейфа гироскопа, устройства отключения горизонтальной коррекции и магнитной коррекции курса с датчиком выключения коррекции, устройство магнитной коррекции курса с индукционным датчиком, устройством компенсации магнитной девиации и устройством компенсации инструментальных погрешностей, первый синусно-косинусный вращающийся трансформатор (СКВТ) по оси крена-тангажа, второй СКВТ по оси курса, задатчик магнитного склонения, переключатель "гиромагнитный курс - гирополукомпасный курс" (ГМК-ГПК), переключатель "гиромагнитный курс - магнитный курс" (ГМК-МК), тем, что введен третий СКВТ, выход которого соединен с входом задатчика магнитного склонения; в гироскопической системе в качестве гироскопа применен динамически настраиваемый гироскоп (ДНГ) с первой измерительной осью, по которой выполнены первый датчик положения и первый датчик момента, и с второй измерительной осью, по которой выполнены второй датчик положения и второй датчик момента, выполнены первый уголок с первой и второй перпендикулярными друг другу гранями и второй уголок с первой и второй перпендикулярными друг другу гранями, первый и второй двигатели выполнены как первый и второй моментные двигатели постоянного тока с статором с постоянными магнитами и ротором с обмоткой управления, на первой грани первого уголка установлены ДНГ и ЖМД так, что продольная ось ЖМД параллельна вектору кинетического момента ротора ДНГ, первая измерительная ось ДНГ направлена по оси крена-тангажа, вторая измерительная ось ДНГ направлена по оси курса, первый уголок установлен на второй уголок так, что первый уголок расположен в области между первой и второй гранями второго уголка, вторая грань первого уголка расположена на первой грани второго уголка, первая грань первого уголка перпендикулярна первой грани второго уголка, вторая грань второго уголка расположена на основании, на расположенной на первой грани второго уголка стороне второй грани первого уголка установлены ротор первого СКВТ и ротор первого моментного двигателя постоянного тока, на первой грани второго уголка установлены статор первого моментного двигателя постоянного тока и статор первого СКВТ, на расположенной в основании стороне второй грани второго уголка установлены ротор второго СКВТ, ротор третьего СКВТ и ротор второго моментного двигателя постоянного тока, в основании установлены статор второго моментного двигателя постоянного тока, статор второго СКВТ и статор третьего СКВТ, диаметр внутренней цилиндрической поверхности ротора первого и второго моментных двигателей постоянного тока выполнены большими диаметра наружной цилиндрической поверхности статора первого и второго СКВТ, статоры первого и второго СКВТ установлены в пространстве, ограниченном внутренней цилиндрической поверхностью роторов соответственно первого и второго моментных двигателей постоянного тока; в устройстве магнитной коррекции курса индукционный датчик выполнен с первым выходом напряжения постоянного тока, пропорционального синусу магнитного курса, и с вторым выходом напряжения постоянного тока, пропорционального косинусу магнитного курса, введены первый и второй интегрирующие усилители, первый, второй и третий суммирующие усилители, первый и второй модуляторы, демодулятор, пороговое устройство, логическое устройство ИЛИ, первый и второй электронные ключи, фильтр высоких частот, первый и второй диоды, устройство компенсации магнитной девиации выполнено с выходами напряжений постоянного тока, для образования каждого из которых выполнен задатчик значения компенсации с потенциометром, запитываемым от стабилизатора напряжения, общего для всех выходов, устройство компенсации инструментальных погрешностей выполнено из двух частей, в каждой из которых задатчик значения компенсации выполнен с потенциометром, запитываемым от вышеуказанного стабилизатора напряжения, первый выход индукционного датчика подключен к входу первого интегрирующего усилителя, выход которого подключен к первому входу первого суммирующего усилителя, второй выход индукционного датчика подключен к входу второго интегрирующего усилителя, выход которого соединен с первым входом второго суммирующего усилителя, к трем другим входам первого суммирующего усилителя подключены два выхода устройства компенсации магнитной девиации и выход первой части устройства компенсации инструментальных погрешностей, к трем другим входам второго суммирующего усилителя подключены два других выхода устройства компенсации магнитной девиации и выход второй части устройства компенсации инструментальных погрешностей, выход первого суммирующего усилителя подключен к входу первого модулятора, выход которого соединен с синусной обмоткой статора второго СКВТ, выход второго суммирующего усилителя соединен с входом второго модулятора, выход которого подключен к косинусной обмотке статора второго СКВТ, одна из обмоток ротора второго СКВТ подключена к входу демодулятора, выход которого подключен к входу фильтра высоких частот, к выходу фильтра высоких частот подключен вход первого электронного ключа, к первому входу третьего суммирующего усилителя подключен первый вывод первого входного резистора, к второму выводу которого подключен первый вывод второго входного резистора, сопротивление второго входного резистора выполнено с отношением n1 (n1>10) к сопротивлению первого входного резистора, к второму выводу второго входного резистора подключены выход первого электронного ключа, анод первого диода и катод второго диода, катод первого диода и анод второго диода подключены к первому выводу второго входного резистора, к первому входу третьего суммирующего усилителя подключен первый вывод первого резистора обратной связи, к второму выводу которого подключен первый вывод второго резистора обратной связи, второй вывод второго резистора обратной связи подсоединен к выходу третьего суммирующего усилителя, к первому выводу первого резистора обратной связи подсоединен вход второго электронного ключа, выход которого подключен к второму выводу первого резистора обратной связи, сопротивление первого резистора обратной связи выполнено с отношением n2 (n2>2) к сопротивлению второго резистора обратной связи, к первому входу третьего суммирующего усилителя посредством третьего входного резистора подключен выход задатчика широтной коррекции, к второму входу третьего суммирующего усилителя подключен выход задатчика компенсации дрейфа ДНГ по первой измерительной оси; выход датчика выключения коррекции подсоединен к входу порогового устройства, выход которого подключен к первому входу логического устройства ИЛИ, к второму входу логического устройства ИЛИ подключен один из контактов переключателя ГМК-ГПК, выход логического устройства ИЛИ подсоединен к управляющему входу первого электронного ключа, к управляющему входу второго электронного ключа подключен один из контактов переключателя ГМК-МК, выход третьего суммирующего усилителя подключен к обмотке ротора второго датчика момента ДНГ; в следящей системе стабилизации горизонта выход первого датчика положения ДНГ подключен к входу первого усилителя, выход которого соединен с обмоткой управления ротора первого моментного двигателя постоянного тока; в следящей системе стабилизации курса выход второго датчика положения ДНГ подключен к входу второго усилителя, выход которого соединен с обмоткой управления ротора второго моментного двигателя постоянного тока; в устройстве горизонтальной коррекции введены третий электронный ключ, третий, четвертый, пятый и шестой диоды, первый и второй нагрузочные резисторы, первый выходной контакт ЖМД подключен к аноду третьего диода и катоду четвертого диода, второй выходной контакт ЖМД подключен к катоду пятого диода и аноду шестого диода, катод третьего диода и анод пятого диода подсоединены к обмотке ротора первого датчика момента ДНГ, к клемме подвода питания источника вторичного питания переменного тока подсоединен первый вывод первого нагрузочного резистора, к второму выводу которого подключены первый вывод второго нагрузочного резистора и вход третьего электронного ключа, к входному контакту ЖМД подсоединены второй вывод второго нагрузочного резистора и выход третьего электронного ключа, к управляющему входу которого подключен выход порогового устройства, сопротивление второго нагрузочного резистора выполнено с отношением n3 (n3>5) к сопротивлению первого нагрузочного резистора.
В частном случае в курсовой системе сопротивление второго входного резистора выполнено с отношением 70-90 к сопротивлению первого входного резистора, сопротивление первого резистора обратной связи выполнено с отношением 9-11 к сопротивлению второго резистора обратной связи, сопротивление второго нагрузочного резистора выполнено с отношением 8-12 к сопротивлению первого нагрузочного резистора.
Выполнение в гироскопической системе двух уголков, расположение на второй грани первого уголка ротора первого СКВТ и ротора второго моментного двигателя постоянного тока, на первой грани второго уголка статора второго моментного двигателя постоянного тока и статора первого СКВТ, расположение на второй грани второго уголка ротора второго СКВТ и ротора первого моментного двигателя постоянного тока, на основании статора первого моментного двигателя постоянного тока и статора второго СКВТ, расположение второй грани первого уголка на первой грани второй уголка обеспечивают уменьшение габаритов и массы курсовой системы вследствие устранения при выполнении гироскопической системы сложных карданных рам.
Выполнение гироскопа гироскопической системы в виде ДНГ, установка ДНГ на первой грани первого уголка, расположение первого уголка в области между первой и второй гранями второго уголка обеспечивают уменьшение габаритов и массы курсовой системы вследствие уменьшения объема гироскопической системы.
Размещением первого СКВТ и второго СКВТ в области внутренней части ротора соответственно второго и первого моментных двигателей постоянного тока обеспечивается уменьшение габаритов и массы курсовой системы.
Выполнением первого и второго двигателей в следящих системах стабилизации курса и горизонта в виде моментных двигателей постоянного тока достигается уменьшение габаритов и массы курсовой системы вследствие устранения редукторных передач.
Путем выполнения в устройстве магнитной коррекции курса первого и второго интегрирующих усилителей первого, второго и третьего суммирующих усилителей, выполнения первой и второй частей устройства компенсации инструментальных погрешностей с задатчиком величины компенсации с потенциометром и стабилизатором напряжения, выполнения устройства компенсации магнитной девиации с задатчиком величины компенсации с потенциометром и стабилизатором напряжения обеспечивается более простое выполнение устройств компенсации инструментальных погрешностей и магнитной девиации, в результате чего уменьшаются габариты и масса курсовой системы.
Посредством введения в устройство горизонтальной коррекции третьего, четвертого, пятого и шестого диодов достигается уменьшение габаритов и массы курсовой системы за счет упрощения преобразования сигналов ЖМД.
Введение первого электронного ключа, порогового устройства и логического устройства ИЛИ обеспечивают уменьшение габаритов и массы курсовой системы за счет упрощения устройства отключения магнитной коррекции курса.
Посредством введения третьего электронного ключа, включения к входному контракту ЖМД первого и второго нагрузочных резисторов обеспечивается уменьшение габаритов и массы курсовой системы вследствие более простого выполнения устройства отключения горизонтальной коррекции.
Путем введения третьего суммирующего усилителя, выполнения на его первом входе первого и второго входных резисторов, введения первого и второго диодов достигается повышение быстродействия устройства магнитной коррекции курса при больших углах рассогласования.
Введение второго электронного ключа, выполнение первого и второго резисторов обратной связи между первым входом третьего суммирующего усилителя и его выходом обеспечивают повышение быстродействия устройства магнитной коррекции курса.
Посредством введения первого и второго суммирующих усилителей, выполнения первой и второй части устройства компенсации инструментальных погрешностей с задатчиком величины компенсации с потенциометром и стабилизатором напряжения, подключения выходов первой и второй частей устройства компенсации инструментальных погрешностей к входам соответственно первого и второго суммирующих усилителей обеспечивается упрощение эксплуатации курсовой системы, так как списание инструментальных погрешностей индукционного датчика производится в производственных условиях.
Путем подключения первого датчика положения ДНГ к первому усилителю, выход которого соединен с обмоткой управления ротора первого моментного двигателя постоянного тока, посредством подключения второго датчика положения ДНГ к второму усилителю, выход которого подключен к обмотке управления ротора второго моментного двигателя постоянного тока, обеспечивается расширение функциональных возможностей курсовой системы вследствие устранения ограничений по углам курса, крена и тангажа.
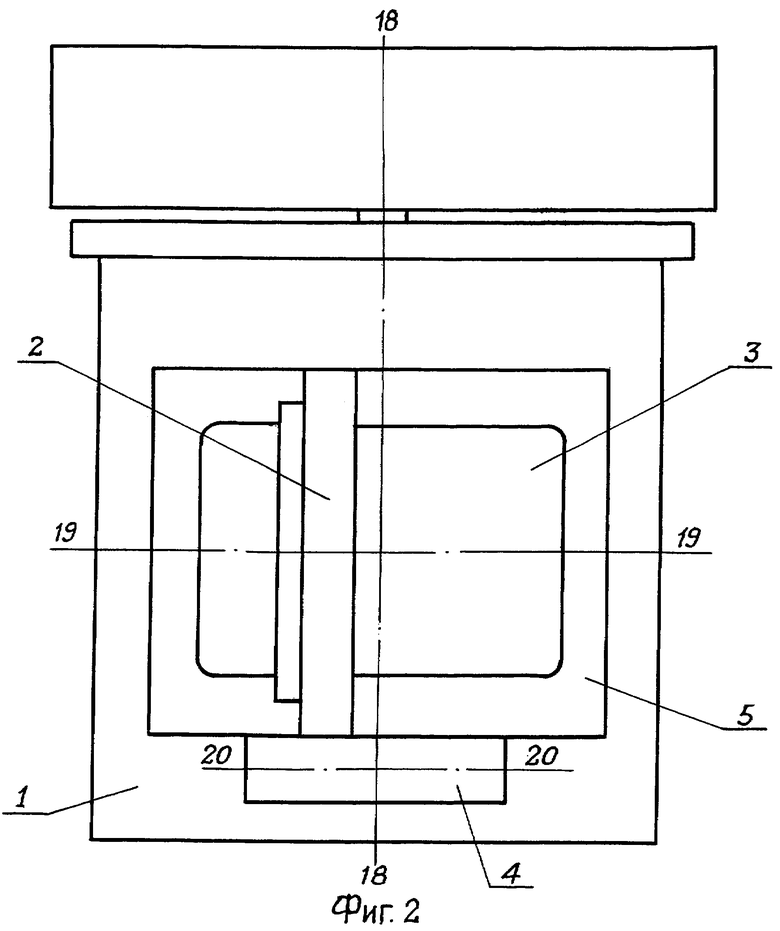
На фиг.1 представлен фронтальный вид курсовой системы; на фиг.2 - профильный вид курсовой системы; на фиг.3 - схема выполнения измерительных осей ДНГ; на фиг.4 - принципиальная электрическая схема устройства магнитной коррекции курса; на фиг.5 - принципиальная электрическая схема устройства горизонтальной коррекции; на фиг.6 - принципиальная электрическая схема следящей системы стабилизации горизонта; на фиг.7 - принципиальная электрическая схема следящей системы стабилизации курса; на фиг.8 - схема включения задатчика магнитного склонения.
В курсовой системе (фиг.1) на первой грани первого уголка 2 расположены ДНГ 3 и ЖМД 4. Перпендикулярная первой грани 1 вторая грань 5 первого уголка 2 установлена на первой грани 6 второго уголка 7, имеющего вторую грань 8, перпендикулярную первой грани 6. На второй грани 5 первого уголка 2, расположенной на первой грани 6 второго уголка 7, установлены внутреннее кольцо первого шарикового подшипника 9', ротор 10' первого СКВТ 11' и ротор 12' первого моментного двигателя 13' постоянного тока. На первой грани 6 второго уголка 7 установлены внешнее кольцо первого шарикового подшипника 9', статор 14' первого СКВТ 11' и статор 15' первого моментного двигателя 13' постоянного тока. Таким образом образована ось 16-16 крена - тангажа курсовой системы.
На установленной на основании 17 второй грани 8 второго уголка 7 расположены внутреннее кольцо второго шарикового подшипника 9'', ротор 10'' второго СКВТ 11'', ротор 10''' третьего СКВТ 11''' и ротор 12'' второго моментного двигателя 13'' постоянного тока. В основании 17 установлены внешнее кольцо второго шарикового подшипника 9'', статор 14'' второго СКВТ 11'', статор 14''' третьего СКВТ 11'' и статор 15'' второго моментного двигателя 13'' постоянного тока. Таким образом образована ось 18-18 курса. Первый уголок 2 расположен в области между первой 6 и второй 8 гранями второго уголка 7. При этом первая грань 1 первого уголка 7. При этом первая грань 1 первого уголка 2 перпендикулярна первой грани 6 второго уголка 7.
Диаметры d1 внутренней цилиндрической поверхности роторов 12', 12'' первого 13' и второго 13'' моментных двигателей постоянного тока выполнены большими диаметров d2 внешней цилиндрической поверхности статоров 14', 14'' первого 11' и второго 11'' СКВТ. Поэтому статоры 14', 14'' первого 11' и второго 11'' СКВТ установлены в пространстве, ограниченном внутренней цилиндрической поверхностью роторов 12'' соответственно первого 13' и второго 13'' моментных двигателей постоянного тока.
В каждом из роторов 12', 12'' первого 13' и второго 12', 13'' моментных двигателей постоянного тока выполнена обмотка управления. В каждом из статоров 15', 15'' первого 13' и второго 13'' моментных двигателей постоянного тока установлены намагниченные радиально постоянные магниты.
В каждом из роторов 10', 10'', 10''' первого 11', второго 11'' и третьего 1''' СКВТ выполнены синусная и косинусная обмотки. В каждом из статоров 14', 14'', 14''' первого 11', второго 11'' и третьего 11''' СКВТ выполнены синусная и косинусная обмотки.
Вектор кинетического момента ротора ДНГ 3 (фиг.2) направлен по оси 19-19, расположенной в горизонтальной плоскости.
Продольная ось 20-20 ЖМД 4 параллельна оси 19-19.
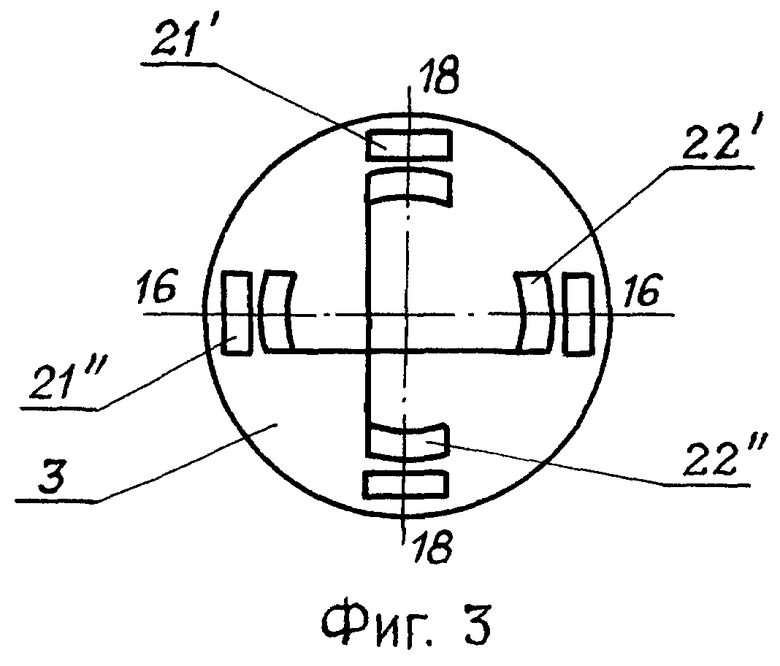
Первая измерительная ось ДНГ 3 (фиг.3) направлена по оси 16-16 крена-тангажа, по которой выполнены первый датчик положения 21' и первый датчик момента 22'. Вторая измерительная ось ДНГ 3 направлена по оси 18-18 курса, по которой выполнены второй датчик положения 21'' и второй датчик момента 22''. Первый 21' и второй 21'' датчики положения могут быть индуктивного типа. Первый 22' и второй 22'' датчики момента могут быть магнитоэлектрического типа с обмотками ротора и постоянными магнитами на статоре.
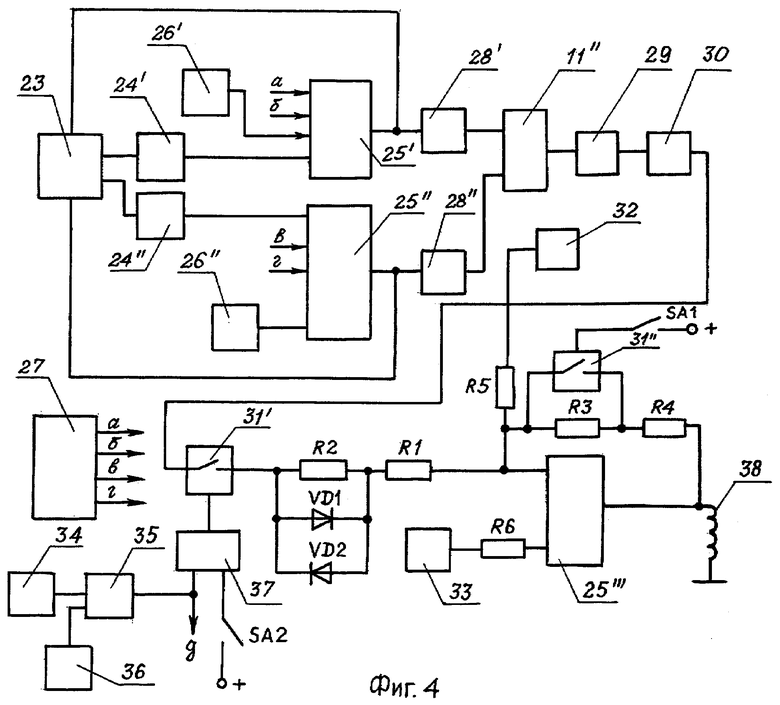
Индукционный датчик 23 (фиг.4) содержит взаимно перпендикулярные дифференциальные первый и второй феррозонды, каждый из которых представляет два сердечника с распределенными по их длине обмоткой возбуждения, сигнальной обмоткой и компенсационной обмоткой, причем выходные сигналы сигнальных обмоток преобразованы с образованием первого выхода индукционного датчика с напряжением постоянного тока, пропорциональным синусу магнитного курса, и второго выхода индукционного датчика с напряжением постоянного тока, пропорциональным косинусу магнитного курса.
Первый выход индукционного датчика 23 подсоединен к входу первого интегрирующего усилителя 24', выход которого подключен к первому входу первого суммирующего усилителя 25'. Второй выход индукционного датчика 23 подключен к входу второго интегрирующего усилителя 24'', выход которого соединен с первым входом второго суммирующего усилителя 25''.
Выход первой части 26' устройства компенсации инструментальных погрешностей подключен к второму входу первого суммирующего усилителя 25', к двум другим входам которого подключены выходы "а", "б" устройства 27 компенсации магнитной девиации. Выход второй части 26'' устройства компенсации инструментальных погрешностей соединен с вторым входом второго суммирующего усилителя 25'', к двум другим входам которого подключены выходы "в", "г" устройства 27 компенсации магнитной девиации. Выходы "а", "в" предназначены для компенсации полукруговой девиации, выходы "б", "г" - для компенсации четвертой девиации.
Первая 26' и вторая 26'' части устройства компенсации инструментальных погрешностей имеют свой задатчик величины компенсации, содержащий потенциометр, подключенный к стабилизатору напряжения, общему для всего устройства компенсации инструментальных погрешностей.
Для обеспечения выходов напряжения постоянного тока устройства 27 компенсации магнитной девиации для каждого выхода имеется задатчик величины компенсации с потенциометром, запитанным от стабилизатора напряжения, который используется в устройстве компенсации инструментальных погрешностей.
Выход первого модулятора 28' соединен с синусной обмоткой статора 14'' второго СКВТ 11'', выход второго модулятора 28'' подключен к косинусной обмотке статора 14'' второго СКВТ 11''. Одна из обмоток ротора 10'', например синусная, второго СКВТ 11'' подключена к входу демодулятора 29, выход которого подключен к входу фильтра 30 высоких частот. Выход фильтра 30 высоких частот соединен с входом первого электронного ключа 31'.
К первому входу третьего суммирующего усилителя 25''' подключен первый вывод первого входного резистора R1, к второму выводу которого подсоединен первый вывод второго входного резистора R2. Сопротивление второго входного резистора R2 выполнено с отношением n1 (n1>10) к сопротивлению первого входного резистора R1. К второму выводу второго входного резистора R2 подключены выход первого электронного ключа 31', анод первого диода VD1 и катод второго диода VD2. Катод первого диода VD1 и анод второго диода VD2 подключены к первому выводу второго входного резистора R2.
К первому входу третьего суммирующего усилителя 25''' подключен первый вывод первого резистора R3 обратной связи, к второму выходу которого подключен первый вывод второго резистора R4 обратной связи. Второй вывод второго резистора R4 обратной связи подсоединен к выходу третьего суммирующего усилителя 25'''.
К первому выводу первого резистора R3 обратной связи подсоединен вход второго электронного ключа 31'', выход которого подключен к второму выводу первого резистора R3 обратной связи. Сопротивление первого резистора R3 обратной связи выполнено с отношением п2 (п2>2) к сопротивлению второго резистора R4 обратной связи. К управляющему входу второго электронного ключа 31'' подключен один из контактов переключателя SA1 ГМК-МК.
К первому входу третьего суммирующего усилителя 25''' посредством третьего входного резистора R5 подключен выход задатчика 32 широтной коррекции, выполненного с выходом напряжения постоянного тока от потенциометра, запитанного от стабилизатора напряжения.
Через четвертый входной резистор R6 к второму входу третьего суммирующего усилителя 25''' подключен выход задатчика 33 компенсации дрейфа ДНГ 3, выполненного с выходом сигнала постоянного тока от потенциометра, запитанного от стабилизатора напряжения.
Выход датчика 34 выключения коррекции, например, выходного устройства авиагоризонта, подключен к первому входу порогового устройства 35, к второму входу которого подключен выход источника 36 опорного напряжения. Выход порогового устройства 35 подсоединен к первому входу логического устройства ИЛИ 37, к второму входу которого подключен один из контактов переключателя SA2 ГМК-ГПК. Выход логического устройства ИЛИ 37 подключен к управляющему входу первого электронного ключа 31'. К выходу третьего суммирующего усилителя 25''' подсоединена обмотка 38 ротора второго датчика момента 22'' ДНГ 3.
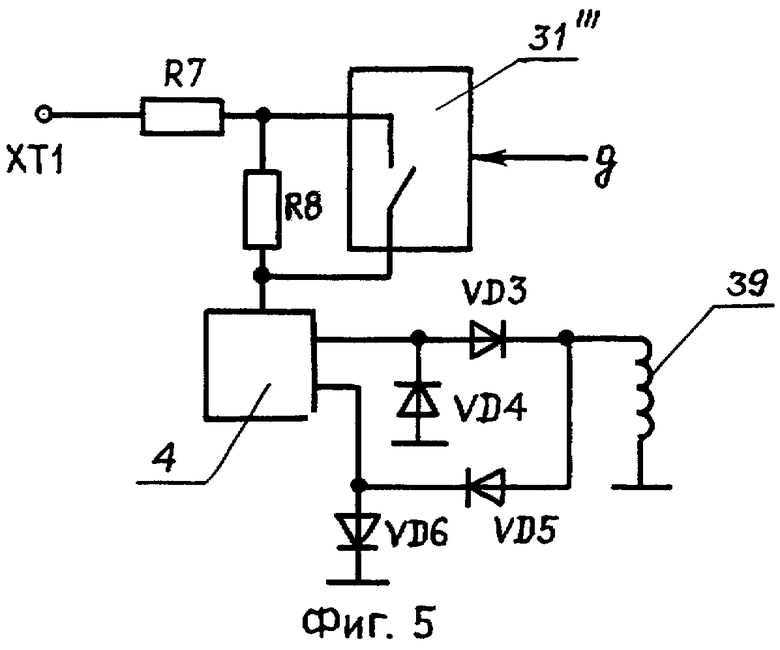
В устройстве горизонтальной коррекции (фиг.5) первый выходной контакт ЖМД 4 подключен к аноду третьего диода VD3 и катоду четвертого диода VD4, второй выходной контакт ЖМД 4 подключен к катоду пятого диода VD5 и аноду шестого диода VD6. Катод третьего диода VD3 и анод пятого диода VD5 подсоединены к обмотке 39 ротора первого датчика момента 22' ДНГ 3. К клемме ХТ1 подключения к источнику питания переменного тока подсоединен первый вывод первого нагрузочного резистора R7, к второму выводу которого подключены первый вывод второго нагрузочного резистора R8 и вход третьего электронного ключа 31'''. К входному контакту ЖМД 4 подсоединены второй вывод второго нагрузочного резистора R8 и выход третьего электронного ключа 31''', к управляющему входу которого подключен выход "д" порогового устройства 35.
Сопротивление второго нагрузочного резистора R8 выполнено с отношением n3 (n3>5) к сопротивлению первого нагрузочного резистора R7.
В следящей системе (фиг.6) стабилизации горизонта выход первого датчика положения 21' ДНГ 3 подключен к входу первого усилителя 40', к выходу которого подсоединена обмотка управления ротора 12' первого моментного двигателя 13' постоянного тока.
В следящей системе (фиг.7) стабилизации курса выход второго датчика положения 21'' ДНГ 3 подсоединен к входу второго усилителя 40'', выход которого подключен к обмотке управления ротора 12'' второго моментного двигателя 13'' постоянного тока.
Выводы "е", "ж" синусной обмотки (фиг.8) ротора 10''' третьего СКВТ 11''' подключены соответственно к клеммам ХТ2 и ХТ3 источника питания переменного тока. Выводы "з", "и" косинусной обмотки соединены вместе. Вывод "к" синусной обмотки статора 14''' третьего СКВТ 11''' соединен с выводом "л" синусной обмотки ротора 41 СКВТ 42, установленного в задатчике магнитного склонения. Выводы "н", "м" соответственно синусной и косинусной обмоток статора 14''' третьего СКВТ 11''' соединены с выводом "п" синусной обмотки ротора 41 СКВТ 42 и с выводом "р" косинусной обмотка ротора 41 СКВТ 42. Вывод "с" косинусной обмотки статора 14''' третьего СКВТ 1''' соединен с выводом "т" косинусной обмотки ротора 41 СКВТ 42. Выводы "у", "ф" синусной обмотки статора 43 СКВТ 42 соединены вместе.
В курсовой системе в режиме магнитной коррекции курса индукционный датчик 23 измеряет проекции вектора индукции горизонтальной составляющей магнитного поля Земли на две взаимно перпендикулярные оси и выдает с первого выхода напряжение постоянного тока, пропорциональное синусу магнитного курса, а с второго выхода - напряжение постоянного тока, пропорциональное косинусу магнитного курса. Сигналы с первого и второго выходов индукционного датчика 23 поступают на входы соответственно первого 24' и второго 24'' интегрирующих усилителей.
Выходные напряжения с выходов первого интегрирующего усилителя 24', первого устройства 26' компенсации инструментальных погрешностей и устройства 27 компенсации магнитной девиации суммируются в первом суммирующем усилителе 25', в результате чего откорректированное на значение инструментальной погрешности преобразования составляющей вектора магнитной индукции в канале первого феррозонда индукционного датчика 23 и значения магнитной девиации по каналу первого феррозонда напряжение с выхода первого суммирующего усилителя подается в компенсационную обмотку первого феррозонда и на вход первого модулятора 28'. Подобным же образом откорректированное напряжение по каналу второго феррозонда с выхода второго суммирующего усилителя 25'' подается в компенсационную обмотку второго феррозонда и на вход второго модулятора 28''. Подаваемое с выхода первого модулятора 28' на синусную обмотку статора 24'' второго СКВТ 11'' напряжение переменного тока пропорционально синусу магнитного курса, а подаваемое с выхода второго модулятора 28'' на косинусную обмотку статора 14'' второго СКВТ 11'' напряжение переменного тока пропорционально косинусу магнитного курса. В результате с обмотки ротора 10'' второго СКВТ 11'' на вход демодулятора 29 поступает сигнал рассогласования между гирополукомпасным и магнитным курсами. После его преобразования в сигнал постоянного тока в демодуляторе 29, фильтрации в фильтре 30 высоких частот напряжение постоянного тока поступает на первый вход третьего суммирующего усилителя 25''', с выхода которого оно подается в обмотку 38 ротора второго датчика момента 22'' ДНГ 3.
В результате прецессии ротора ДНГ 3 получаемый сигнал рассогласования с выхода второго датчика положения 21'' ДНГ 3 подается на вход второго усилителя 40'', ас его выхода - на обмотку управления ротора 12'' второго моментного двигателя 13'' постоянного тока, который разворачивает второй уголок 7 в положение согласования гирополукомпасного и магнитного курсов. При этом с вывода "к" синусной обмотки статора 14''' третьего СКВТ 11''' к потребителю поступает сигнал синуса гиромагнитного курса, а с вывода "с" косинусной обмотки статора 14''' третьего СКВТ" - сигнал косинуса гиромагнитного курса.
При больших углах рассогласования между гирополукомпасным и магнитным курсами напряжение с выхода фильтра 30 высоких частот увеличивается до такой величины, что происходит открытие одного из первого VD1 или второго VD2 диодов. При этом второй входной резистор R2 шунтируется малым сопротивлением открытого диода, коэффициент передачи третьего суммирующего усилителя 25''' увеличивается в n1 раз, и во столько же раз увеличивается скорость согласования гирополукомпасного и магнитного курсов.
В других случаях, когда нужно ускорить согласование гирополукомпасного и магнитного курсов, например, при девиационных работах, переключатель SA1 ставится в положение ВКЛ. При этом второй электронный ключ 31'' размыкается, в цепь обратной связи третьего суммирующего усилителя 25''' включается первый резистор R3 обратной связи, коэффициент передачи третьего суммирующего усилителя 25''' увеличивается в n2 раз, и во столько же раз увеличивается скорость согласования гирополукомпасного и магнитного курсов.
При задании от задатчика 32 широтной коррекции соответствующего северной или южной широте напряжения ДНГ 3 прецессирует относительно своей второй измерительной оси. В результате второй уголок 7 разворачивается относительно оси 18-18 курса со скоростью вертикальной составляющей угловой скорости Земли.
При подаче на второй вход третьего суммирующего усилителя 25''' с выхода задатчика 33 компенсации дрейфа напряжения, соответствующего дрейфу ДНГ 3 по его второй измерительной оси, ДНГ 3 прецессирует относительно своей второй измерительной оси в направлении, противоположном его скорости дрейфа, а второй уголок 7 разворачивается, компенсируя скорость дрейфа ДНГ 3 относительно оси 18-18 курса.
При превышении допустимых углов крена датчик 34 выключения коррекции выдает такое напряжение, при котором срабатывает пороговое устройство 35 в соответствии с заданным на его второй вход напряжением с выхода источника 36 опорного напряжения. Тогда по сигналу с выхода логического устройства ИЛИ 37 первый электронный ключ 31' отключает выход фильтра 30 высоких частот от второго вывода второго входного резистора R2, обеспечивая отключение магнитной коррекции курса. При включении переключателя SA2 сигналом с логического устройства ИЛИ 37 первый электронный ключ 31' отключает магнитную коррекцию курса, обеспечивая режим гирополукомпаса.
При отклонении продольной оси 20-20 ЖМД 4 от плоскости горизонта, например, первый выходной контакт ЖМД 4 замыкается, посредством третьего диода VD3 происходит выпрямление поступающего от контакта ХТ1 переменного напряжения. Через обмотку 39 ротора первого датчика момента 22' ДНГ 3 проходит постоянный ток, ротор ДНГ 3 прецессирует относительно его первой измерительной оси, первый датчик положения 21' выдает сигнал в первый усилитель 40', выходным напряжением которого приводится в действие ротор 12' первого моментного двигателя 13' постоянного тока. В результате первый уголок 2 разворачивается, приводя в плоскость горизонта продольную ось 20-20 ЖМД 4 и обеспечивая горизонтальное положение вектора кинетического момента ротора ДНГ 3. При превышении допустимых углов крена с выхода "е" порогового устройства 35 на управляющий вход третьего электронного ключа 31''' подается сигнал, которым третий электронный ключ 31''' отключает шунтирование второго нагрузочного резистора R8. В результате падение напряжения на третьем диоде VD3 оказывается недостаточным для его открытия, что приводит к отключению горизонтальной коррекции.
В следящей системе стабилизации горизонта сигнал рассогласования с первого датчика положения 21' ДНГ 3 передается на первый усилитель 40', который подает напряжение постоянного тока на ротор 12' первого моментного двигателя 13' постоянного тока, который разворачивает первый уголок 2 в положение, обеспечивающее горизонтальное положение вектора кинетического момента ротора ДНГ 3.
В следящей системе стабилизации курса сигнал рассогласования с второго датчика положения 21'' ДНГ 3 поступает в второй усилитель 40'', с выхода которого напряжение постоянного тока подается на ротор 12'' второго моментного двигателя 13'' постоянного тока. В результате второй уголок 7 разворачивается в положение, совпадающее с курсом. Путем разворота ротора 41 СКВТ 42 задатчика магнитного склонения по его шкале устанавливается величина магнитного склонения. При этом с вывода "х" синусной обмотки статора 43 СКВТ 42 потребителю выдается сигнал синуса истинного курса, а с вывода "ц" косинусной обмотки статора 43 - сигнал косинуса истинного курса.
С обмоток ротора 10' первого СКВТ 11' потребителю выдается сигнал крена или тангажа относительно оси 16-16 крена-тангажа.
Источники информации
1. Патент РФ №2077029, кл. G 01 C 23/00. Комплексная курсовая система 1997 г.
2. Ю.А.Акиндеев, В.Г.Воробьев, А.А.Карчевский и др. Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации. М.: "Машиностроение", 1979 г., с.110-158.
| название | год | авторы | номер документа |
|---|---|---|---|
| КУРСОВАЯ СИСТЕМА | 2008 |
|
RU2381452C1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| ДАТЧИК МАГНИТНОГО КУРСА | 2007 |
|
RU2350906C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| Преобразователь "угол-код" | 1975 |
|
SU515134A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| НАКЛОННО-ПОВОРОТНЫЙ СТЕНД | 2004 |
|
RU2277697C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |


Изобретение относится к области приборостроения, а именно к устройствам для определения курса подвижных объектов. Курсовая система содержит гироскопическую систему с гироскопом, следящие системы стабилизации горизонта и курса, устройства горизонтальной коррекции с жидкостным маятниковым датчиком (ЖМД), магнитной коррекции курса с индукционным датчиком, задатчики магнитного склонения, широтной коррекции, компенсации дрейфа гироскопа, первый синусно-косинусный вращающийся трансформатор (СКВТ) по оси крена-тангажа, второй СКВТ по оси курса. В нее введен соединенный с задатчиком магнитного склонения третий СКВТ по оси курса. В гироскопической системе в качестве гироскопа выполнен динамически настраиваемый гироскоп, являющийся частью систем стабилизации горизонта и курса и установленный на первом уголке, который расположен на втором уголке. В устройство магнитной коррекции курса введены интегрирующие и суммирующие усилители, модуляторы, демодулятор, пороговое устройство, логическое устройство ИЛИ, электронные ключи, два диода. В устройство горизонтальной коррекции введены подключенные к выводам ЖМД электрические цепи, содержащие четыре диода, два нагрузочных регистра, коммутируемые электронным ключом. Техническим результатом изобретения является уменьшение габаритов и массы, расширение функциональных возможностей, повышение быстродействия, упрощение эксплуатации. 1 з.п. ф-лы. 8 ил.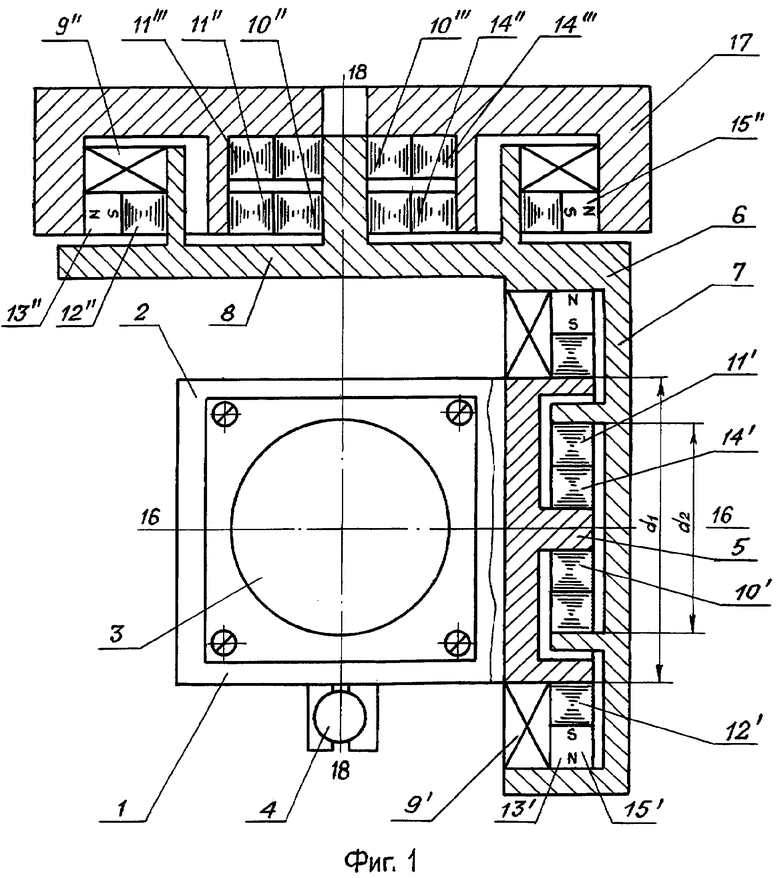
| АКИНДЕЕВ Ю.А | |||
| и др | |||
| Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации | |||
| М., "Машиностроение", 1979, стр.110-158 | |||
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1993 |
|
RU2077029C1 |
| БЛОК КОНТРОЛЯ ДВУХ КУРСОВЕРТИКАЛЕЙ | 2002 |
|
RU2227934C2 |
| US 4200925 A1, 29.04.1980 | |||
| US 4343035 А, 03.08.1982. | |||

