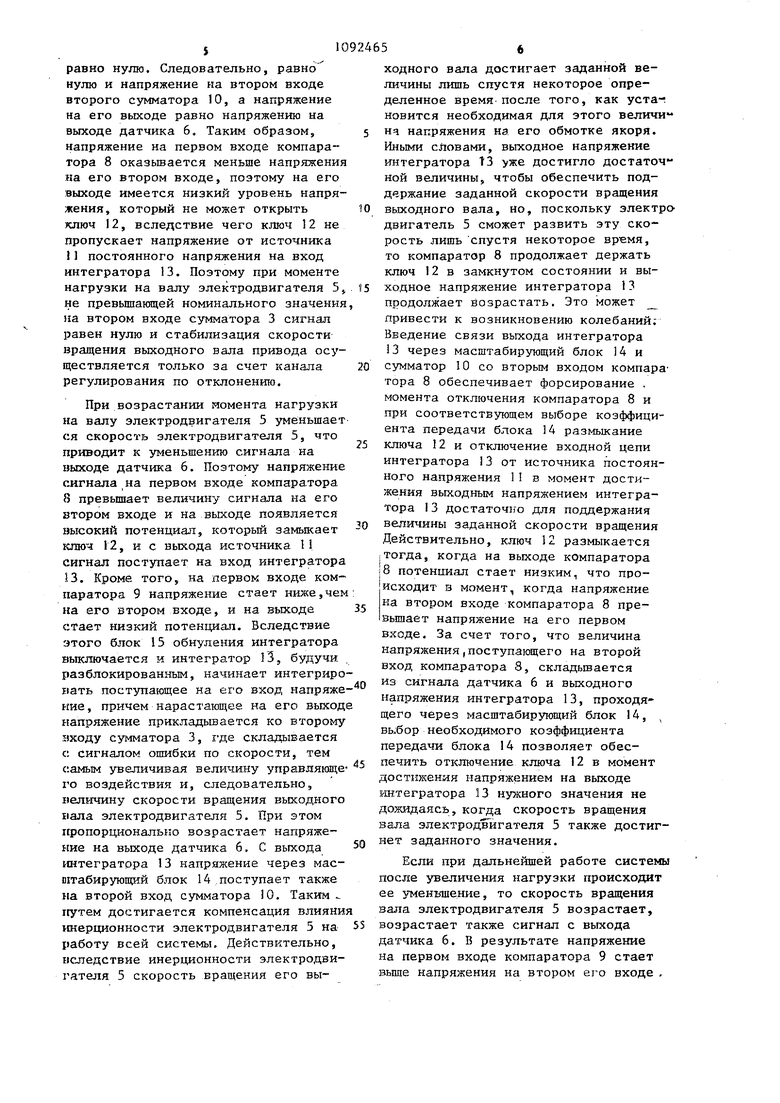
-Иаббретение относится к системам стабилизации и регулирования скорости вращения электрических двигателей и может быть использовано, например, в качестве электромеханического прИ вода медицинского прибора для исследования агрегации и вязкости крови. При работе прибора исследуемая кровь пропускается через мелкоячеистый фильтр и при этом с помощью тен-; зодатчика измеряется величина сопротивления, оказьшаемого фильтром току крови. Причем для измерения одних характеристик крови необходимо поддерживать скорость фильтрации строго постоянной, при этом величина сопротивления фильтра току крови служит характеристикой агрегатного состояни крови, а для исследования других ее параметров, в частности вязкости, необходимо скорость фильтрации менять в широких пределах. В зависимос от состояния исследуемой крови вели чина сопротивления фильтра кровотоку, а следовательно, и механическая нагрузка на привод прибора меняется в процессе фильтрации одной пробы и от одной пробы к другой в широких пределах (в 00 и более раз). Но при этом точность подаержания установлен ной скорости фильтрации для получени достоверных результатов должна оставаться высокой. Известно, что для того, чтобы получить высокую точност стабилизации, привод охватывают отри цательной обратной связью по скорости. Известна система регулирования скорости, содержащая последовательно соединенные задатчик регулируемого параметра, первый блок сравнения, усилитель, реле, интегратор, фильтр низких частот, источник постоянного напряжения, второй блок сравнения, сервомеханизм, объект регулирования и датчик регулируемой координатыj, соединенный выходом со вторым входом первого блока сравнения, выход усилителя соединен со вторым входом второго блока сравнения, третий вход которого через датчик промежуточного параметра подключен к выходу сервопривода I 3. В известной системе уменьшено . влияние фазовых погрешностей элементов структурной схемы системы и дрейфа усилителя на точность ее работы, однако узеличение механической нагрузки на валу сервомеханизма влечет за собой увеличение ошибки стабилизации и регулирования скорости системы. Таким образом, недостатком системы является ее низкая точность. Известна также система регулирования скорости, содержащая последовательно соединенные задатчик, сумматор, сервомеханизм, объект регулирования и датчик регулируемой величин), подключенный выходом ко второму входу сумматор а, к входам трех маештабирующих блоков и к первому входу сигнум-реле, выходы первого и третьего масштабирующих блоков подключены к первым входам соответственно первого и второго компараторов, вторые входы которых подключены ко второму входу сигнум-реле и к выходу второго масштабирующего блока, выходы первого и второго компараторов соединены с соответствующими управляющими входами ключа и усилителя с переменным коэффициентом усиления, сигнальный вход которого через ключ и сигнумреле подключен к выходу источника Постоянного напряжения, а выходы Р интегратор - к третьему входу сумматора С2 X Недостаток указанной системы заключается также в низкой точности при изменении механической нагрузки на валу сервомеханизма. Наиболее близкой по технической сущности к изобретению является система регулирования скорости, содержащая последовательно соединенные задатчик регулируемой величины, блок управления, усилительэ электродвигатель и датчик регулируемой величины, подключенный выходом ко второму входу блока сравнения и входам трех масштабирующих блоков, причем выходы перво.го и третьего масштабирующих блоков соединены с первь ми входами соответственно первого и второго компараторов, вторые входы которых подключены к выходу второго масштабирующего блока, а выходы которых подктаочены к первому и второму управляющим входам ключа, сигнальные входы которого соединены с выходами источника постоянного напряжения, а выход через интегратор соединен с третьим входом блока сравнения З . Однако и данная система характеризуется низкой точностью. Цель изобретения - повьшение точности сие темы. Поставленная цель достигается тем что в системе регулирования скорости содержащей первый мабтабирующий блок последовательно соединенные задатчик регулируемой величины, блок сравнени первый сумматор, усилитель, электродвигатель и датчик регулируемой вели чины, соединенный выходом со вторым входом блока сравнения и первым входом первого компаратора, и последова тельно соединенные второй масштабиру ющий блок и второй компаратор, соеди ненный выходом с управляющим входом ключа, сигнальный вход которого соединен с выходом источника постоянног напряжения, а выход через интегратор соединен со вторым входом первого , сумматора, дополнительно установлены блок обнуления интегратора и второй сумматор, первый вход которого соеди нен с выходом датчика регулируемой величины, второй вход - с выходом первого масштабирующего блока, вход которого соединен с выходом интегратора, а выход - со вторым входом вто рого компаратора, вход блока обнуления интегратора соединен с выходом первого компаратора, а выход - со вторым входом интегратора, вход второго масштабирующего блока соединен с выходом задатчика регулируемой величины, а выход - с вторым входом первого компаратора. На чертеже представлена функциональная схема предлагаемой системы. Схема включает задатчик 1 регулируемой величины, блок 2 сравнения, первый сумматор 3, усилитель 4, электродвигатель 5, датчик 6 регулируемой величины, второй масштабирующий блок 7, второй и первый компараторы 8 и 9 второй сумматор 10, источник 11 постоянного напряжения, ключ 12, интегратор 13, первый масштабирующий блок 14, блок I5 обнуления интегратора, Задатчик 1 регулируемой величины скорости представляет собой управля емь(й делитель напряжения, например, ;прецизионный потенциометр, блок Т сравнения выполнен, например, на Jсуммирующем операционном усилителе, первый сумматор 3 - например, на суммирующем операционном усилителе, усилитель 4 - например, Р виде усилителя постоянного тока, электродвигатель 5 -например, в виде электродвигателя постоянного тока, датчик 6 регулируемой величины - скорости выполнен, например, в виде тахогенератора постоянного тока, масштабирующий блок 7 - например, на реэисторном делителе напряжения, сумматор 10 аналогично сумматору 3, ключ 12 -/ например, на транзисторе, блок 15 обнуления интегратора - например, электромагнитном или электронном реле, Система работает следукнцим образом. Сигнал постоянного тока, пропорциональный величине заданной скорости, с задатчика 1 через блок 2 сравнения, сумматор 3 и усилитель 4 поступает на обмотку якоря электродвигателя 5 и приводит его во вращение, Величина скорости вращения вала электродвигателя 5 преобразуется датчиком 6 в пропорциональный скорости вращения электродвигателя 5 электрический сигнал и поступает на второй вход блока 2 сравнения. На выходе последнего образуется напряжение ошибки, равное разности между задающим сигналом и сигналом с выхода датчика 6. Это напояжение через сумматор 3 прикладывается ко входу усилителя 4, а выходное напряжение усилителя 4, воздействуя на обмотку якоря электродвигателя 5, поддерживает требуемую скорость вращения выходного вала при условии, что момент нагрузки на валу электродвигателя 5 равен или меньший номинального значения. Входной сигнал с выхода задатчика 1 поступает также и на вход масштабирующего блока 7, коэффициент передачи которого выбран такой величины, чтобы при номинальной нагрузке на валу электродвигателя 5 напряжение на выходе масштабирующего блока 7 было несколько меньше напряжения с выхода датчика 6, Поэтому на первом входе первого компаратора 9 напряжение больше, чем на втором его входе. Следовательно, на его выходе присутствует высокий уровень напряжения, которое запускает блок 15 обнуления интегратора. Таким образом, интегратор 13 находится в обнуленном cocтoя fии и на его выходе напряжг-ние 1 равно нулю. Следовательно, равно нулю и напряжение на втором входе второго сумматора 10, а напряжение на его выходе равно напряжению на выходе датчика 6, Таким образом, напряжение на первом входе компаратора 8 оказьшается меньше напряжени на его втором входе, поэтому на его выходе имеется низкий уровень напряжения, который не может открыть ключ 12, вследствие чего ключ 12 не пропускает напряжение от источника 11 постоянного напряжения на вход интегратора 13. Поэтому при моменте нагрузки на валу электродвигателя 5 не превьшающей номинального значения на втором входе сзжматора 3 сигнал равен нулю и стабилизация скорости вращения выходного вала привода осуществляется только за счет канала регулирования по отклонению. При возрастании момента нагрузки на валу электродвигателя 5 уменьшает ся скорость электродвигателя 5, что приводит к уменьшению сигнала на выходе датчика 6. Поэтому напряжение сигнала на первом входе компаратора 8 превышает величину сигнала на его втором входе и на выходе появляется 8ЫСОКИЙ потенциал, который замыкает ключ 12, и с выхода источника И сигнал поступает на вход интегратора 13. Кроме того5 на первом входе ком паратора 9 напряжение стает ниже,че на его втором входе, и на выходе стает низкий потенциал. Вследствие этого блок 15 обнуления интегратора выключается и интегратор 13, будучи разблокированньм, начинает интегриро иать поступающее на его вход напряже ние, причем нарастающее на его выход напряжение прикладывается ко второму входу сумматора 3, где складывается с сигналом ошибки по скорости, тем самым увеличивая величину управляюще го воздействия и, следовательно, величину скорости вращения выходного нала электродвигателя 5. При этом пропорционально возрастает нагфяжение на выходе датчика 6, С выхода штегратора 13 напряжение через масштабирующий блок 14 поступает также на второй вход сумматора 10. Таким тгутем достигается компенсация влияни инерционности электродвигателя 5 на работу всей системы. Действительно, вследствие инерционности электродвигателя 5 скорость вращения его вы56ходного вала достигает заданной величины лишь спустя некоторое определенное время-после того, как устаг новится необходимая для этого величи на напряжения на его обмотке якоря. Иными словами, выходное напряжение рштегратора ТЗ уже достигло достаточной величины, чтобы обеспечить поддержание заданной скорости вращения выходного вала, но, поскольку электродвигатель 5 сможет развить эту скорость лишь спустя некоторое врвмя, то компаратор 8 продолжает держать ключ 12 в замкнутом состоянии и выходное напряжение интегратора 13 продолжает возрастать. Это может привести к возникновению колебаний; Введение связи выхода интегратора 13 через масштабирующий блок 14 и сумматор IО со вторым входом компаратора 8 обеспечивает форсирование . момента отключения компаратора 8 и при соответствзпощем выборе коэффициента передачи блока 14 размыкание ключа 12 и отключение входной цепи интегратора 13 от источника постоянного напряжения 1 в момент достижения выходным напряжением интегратора 13 достаточ1го для поддержания величины заданной скорости вращения Действительно, ключ 12 размыкается тогда, когда на выходе компаратора 8 потенциал стает низким, что происходит в момент, когда напряжение на втором входе компаратора 8 превьш1ает напряжение на его первом входе. За счет того, что величина напряжения (ПОступакяце г о на второй вход компаратора 8, складьшается из сигнала датчика 6 и выходного напряжения интегратора 13, проходящего через масштабирующий блок 14, выбор необходимого коэффициента передачи блока 14 позволяет обеспечить отключение ключа 12 в момент достижения напряжением на выходе интегратора 13 нужного значения не дожидаясь, когда скорость вращения вала электродвигателя 5 также достигнет заданного значения. Если при дальнейшей работе системы после увеличения нагрузки происходит ее уменвшение, то скорость вращения вала электродвигателя 5 возрастает, возрастает также сигнал с выхода датчика 6. В результате напряжение на первом входе компаратора 9 стает вьппе напряжения на втором его входе , и на его выходе появляется высокий уровень напряжения, который включает блок обнуления интегратора 15. Этот блок 15, воздействуя на второй вход интеграторе 13, обеспечивает обнулени его выходного напряжения. Следовател но, сигнал со второго входа сумматор 3 снимается, и точность стабилизации скорости привода обеспечивается толь ко каналом регулирования по отклонению . Таким образом, в системе достигается инвариантность выходной величины от возмущаемого воздействия .(изменения момента нагрузки на валу) за счет введения астатизма в канал ; регулирования по возмущению. При это исключается возможность потери устойчивости в работе привода, возника тая при наличии положительной обрат ной связи по моменту нагрузки электродвигателя 5, а влияние инерционнос ти интегратора 13 на устойчивость системы исключается с помощью введенного формирования момента размыкания ключа 12, а также обнуления интегратора 13 при уменьшении величи ны нагрузки на валу электродвигателя 5. Кроме того,предлагаемая система по сравнению с базовым объектом позволяет обеспечить высокую точность стабилизации скорости вращения электродвигателя 5 при изменяющейся в широких пределах нагрузке без уменьшения запаса устойчивости работы системы, так как в этой системе наряду с сигналом (напряжением) управления, формируемым каналом регулирования со статизмом, формируют сигнал управления в канале регулирования с астатиз мом первого порядка, которым воздействуют на исполнительный электродвигатель системы только при превышении сигналом ошибки системы некоторой заданной величины (обусловленной в основном, возрастанием момента нагрузки электропривода), что снижает 10 8 значение величины ошибки. При исчезновении возьгущающего воздействия ошибка системы снижается и сигнал управления, формируемый каналом регулирования с астатизмом первого порядка, не воздействует на электродвигатель системы, тем самым исключается отрицательное влияние интегрирующего звена на устойчивость работы системы. Это достигается за счет дополнительного введения в известную систему второго сумматора и блока обнуления интегратора с соответствующими новыми .связями. Испытания показали, что при измег нении момента нагрузки на валу в 10 раз,ошибка системы возросла на 6%. При отключении канала управляючего сигнала с астатизмом первого порядка ошибка системы возрастает на 40%, т.е. точность системы повышается примерно Б семь раз по сравнению с прототипом. Предлагаемая система технологически проще и конструктивнее базового объекта, так как не нуждается в применении специальных датчиков тока или момента, которые должны быть связаны с силовыми цепями либо электрически, либо кинематически, что в любых случаях вызьшает определенные затруднения при конструировании и изготовлении. Указанные преимущества предлагаемой системы позволяют существенно повысить технические характеристики аппаратуры, использующей предлагаемую систему, что предопределяет широкие возможности ,ее использования в любой области техники. Экономические преимущества не ожидаются, так как достижение указанного технического эффекта приведет к относительному увеличению затрат на реализацию предлагаемого технического решения.


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГАЗОВОЙ МАГИСТРАЛИ С ТУРБОДЕТАНДЕРОМ | 2017 |
|
RU2645821C1 |
| Система регулирования скорости электропривода постоянного тока | 1980 |
|
SU920652A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Устройство для регулирования скорости намотки нитей | 1981 |
|
SU1341137A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для управления турбонагнетателем с электроприводом | 1984 |
|
SU1193299A1 |
| УСТРОЙСТВО АДАПТИВНОГО РЕГУЛИРОВАНИЯ ТУРБОДЕТАНДЕРА | 2015 |
|
RU2611120C1 |
| Электропривод переменного тока | 1988 |
|
SU1636980A2 |
СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ, содержащая первый масштабирующий блок, последовательно соединенные задатчик регулируемой величины, блок сравнения, первый сумматор, усилитель, электродвигатель и датчик регулируемой величины, соединенный выходом со вторым входом блока сравнения и первым входом первого компаратора, и последовательно соединенные второй масштабирующий блок и второй компаратор, соединенный выходом с управляющим входом ключа, сигнальный вход которого соединен с выходом источника постоянного напряжения, а выход через интегратор соединен со вторым входом первого сумматора, отличающаяся тем, что, с целью повышения точности системы, в ней дополнительно установлены блок обнуления интегратора и второй сумматор, первый вход которого соединен с выходом датчика регулируемой величины, второй вход - с выхо,дом первого масштабирующего блока, вход которого соединен с выходом интегратора, а выход - со вторым СО входом второго компаратора, вход блока обнуления интегратора соединен с выходом первого компаратора, а выход - со вторым входом интегратора, S вход второго масштабирующего блока соединен с выходом задатчика регулируемой величины, а выход - с вторым входом первого компаратора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 0 |
|
SU250257A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
