го интегратора и выходом второго корректирующего усилителя, вход которого соединен с выходом второго сумматора, выход датчика скорости соединен с вторым входом третьего сумматора и первым входом пятого сумматора, второй вход которого .соединен с выходом второго интегратора выход пятого сумматора соединен с входом первого корректирующего усилителя, третий выход коммутатора соединен с вторым входом четвертого сумматора, выход которого соединен, с входом третьего корректирующего усилителя, выход которого соединен с третьим входом коммутатора.
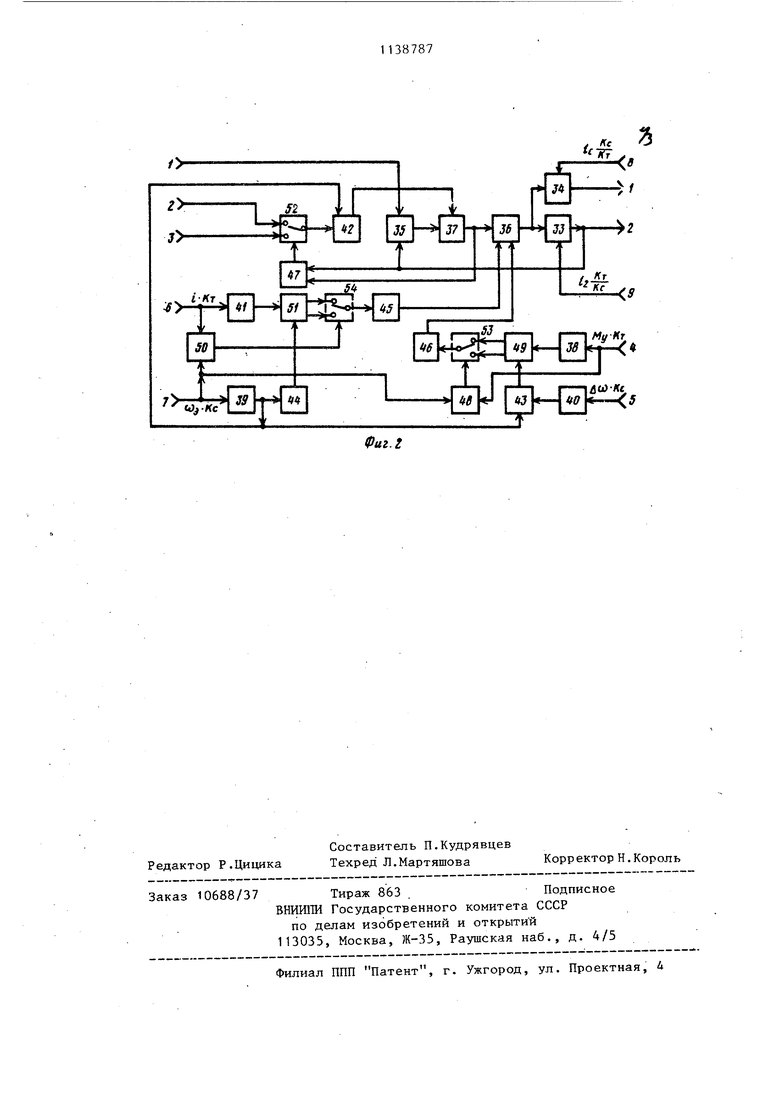
2. Система по п. 1, отличающаяся тем, что второй.регулятор содержит интегратор, блок дифференцирования, два сумматора, усилитель, четыре блока модуля, три функциональных преобразователя, два корректирующих усилителя, пять компараторов и три управляемых ключа, при этом первьй вход второго регулятора соединен с первым входом первого сумматора, последовательно с которым соединены усилитель, второй сумматор и блок дифференцирования, выход которого соединен с первым выходом второго регулятора, второй выход которого соединен с первым входом первого компаратора, вторым входом первого сумматора и выходом интегратора, первый вход которого соединен с выходом второго сумматора второй и третий входы которого соединены с выходами соответственно первого и второго корректирующих усилителей, второй и третий входы второго регулятора соединены соответственно с первым и вторым входами первого ключа, управляющий вход которого соединен с выходом первого компаратора, второй вход которого соединен с выходом усилителя, второй вход которого соединен с выходом
8787
первого функционального преобразователя, первый вход которого соединен с выходом первого ключа, четвертьй вход второго регулятора соединен с первым входом второго компаратора И входом первого блока модуля, выход которого соединен с первым входом третьего компаратора, второй вход которого соединен с выходом второго функционального преобразователя, первый вход которого соединен с входом третьего функционального преобразователя, выходом второго блока модуля и вторым входом первого функционального преобразователя, пятый вход второго регулятора соединен с входом третьего блока модуля, выход которого соединен с, вторым входом второго функционального преобразователя, шестой вход второго регулятора соединен с первым входом четвертого компаратора и входом четвертого блока модуля, выход которого соединен с первым входом пятого компаратора, второй вход которого соединен с выходом третьего функционального преобраз.ователя, седьмой вход второго регулятора соединен с входом второго блока модуля и вторыми входами второго и четвертого компараторов, выходы которых соединены ;С управляющими входами соответственно второго и третьего ключей, восьмой и девятый входы второго регулятора соединены с вторыми входами соответственно блока дифференцирования и интегратора, первый и второй выходы третьего компаратора соединены соответственно с первым и вторым входами второго ключа, выход которого соединен с входом второго корректирующего усилителя, первьш и второй выходы пятого компаратора соединены соответственно с первым и вторым входами третьего ключа, выход которого соединен с входом первого корректирующего усилителя.





| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Устройство для управления приводом робота | 1988 |
|
SU1580317A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 1991 |
|
RU2025413C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |

1 . САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно соединенные первый сумматор, первый регулятор, усилитель мощности, электродвигатель с установленными на нем датчиком тока,.датчиком скорости, датчиком ЭДС и датчиком тока возбуждения, упругую механическую передачу, соединенную с технологическим механизмом, выходом подключенным к датчику скорости механизма, блок возбуждения, датчик упругого момента, соединенный с упругой механической передачей, задатчик, три интегратора, второй, третий,, четвертый и пятый сумматоры, выход датчика тока возбуждения соединен с первым входом блока возбуждения, выход которого соединен с входом обмотки возбуждения электродвигателя, выход датчика скорости которого соединен с первыми входами первого,.второго и третьего сумматоров, выход первого интегратора соединен с вторым входом второго сумматора, отлича.ющаяся тем, что, с целью повышения качест-. ва и точности регулирования, в нее введены три корректирующих усилителя, коммутатор и второй регулятор, первый вход которого соединен с вторым входом блока возбуждения и первым выходом задатчика, второй и третий выходы которого соединены соответственно с вторым и третьим входами второго регулятора, четвертый вход которого соединен с первым входом второго интегратора, выходом датчика упругого момента, первым входом четвертого сумматора и перi вым выходом коммутатора, первый вход которого соединен с выходом третье(Л го интегратора, первый вход которого соединен с выходом третьего сумматора и пятым входом второго регулятора, шестой вход которого соединен с вторым входом первого рег-улятора, первым входом первого интегратора и выходов датчика тока электродвигаCAD теля, датчик скорости которого соесх динен с седьмым входом второго регулятора, восьмой вход которого сое сх динен с вторым входом третьего интегратора и вторым выходом коммута тора, второй вход которого соединен с четвертым выходом задатчика, выход первого корректирующего усилителя соединен с вторым входом второго интегратора и девятым входом второго регулятора, первый и второй выходы которого соединены соответственно с вторым и третьим входами первого сумматора, выход датчика ЭДе соединен с третьим входом первого регулятора, четвёртый вход которого соединен с вторым входом перво
1
Изобретение относится к автоматике и может быть использовано для управления промьшшенными электроприводами, в которых связь с объектом
осуществляется с помощью упругой механической передачи и имеют место изменения момента инерции на валу двигателя, жесткой упругой механи 31ческой передачи, моментов нагрузки и инерции объекта в роботостроении (в системах управления приводами рабочих органов манипудяционных Ро ботов), в системах управления приво дами главного движения металлорежущих станков, в металлургии (в системах управления приводами моталок и прокатных валков непрерывных прокатных станков, главными приводами обжимных и толстолистовых станов и т.д.) . Известна самонастраивающаяся система управления, содержащая посл довательно соединенные задатчик, первый сумматор, регулятор, усилитель мощности и электродвигатель с установленными на нем датчиком регу лируемой координаты и датчиком тока выход которого через последовательно соединенные второй сумматор, пер вый блок умножения, третий сумматор первый интегратор,четвертый сумматор, второй блок з ножения и второй интегратор подключен к управляющему входу регулятора и второму входу первого блока умножения, первьй вход которого подключен к второму входу второго блока умножения, выхо датчика регулируемой координаты соединен с вторым входом первого сумматора и вторым входом четвертого сумматора, выход которого соединен с вторым входом третьего сумматора, последовательно соединенные третий интегратор, пятый сумматор и блок деления, второй вход которог соединен с выходом второго интегратора, а выход - с вторым входом вто рого сумматора, выход первого блока умножения подключен к входу третьег интегратора, выход датчика регулируемой координаты подключен к второму входу пятого сумматора l . Недостатком такой системы является отсутствие самонастройки от вариаций момента нагрузки. Наиболее близким техническим решением к изобретению является систе ма управления объектом-с упругими связями, содержащая последовательно соединенные задатчик, регулятор, ис полнительный механизм, подключенный к объекту, выход которого через последовательно соединенные датчик, идентификатор состояния объекта, первый измеритель ошибки и формирователь сигнала управления, выход которого подключен к второму входу 7 4 регулятора, выход которого подключен к второму входу идентификатора состояния объекта, второй выход которого через сумматор соединен с третьим входом регулятора, первый вход которого соединен с вторым входом первого измерителя ошибки, последовательно соединенные второй измеритель ошибки, формирователь сигнала коррекции и блок масштабных коэффициентов, выход которого подключен к третьему входу идентификатора состояния объекта, третий выход которого соединен с первым входом второго измерителя ошибки, второй вход которого соединен с выходом датчика, а второй вход формирователя сигнала коррекции с выходом первого измерителя ошибки 2. В известной системе требуемая динамика обеспечивается за счет корректирующего сигнала, формируемого сумматором и поступающего на вход регулятора основного контура, т.е. без перестройки регулятора основного контура. Поэтому известная система обладает ограниченными возможностями для объектов с изменяющимися параметрами, а следовательно невысокими качествам и точностью регулирования. Цель изобретения - повышение качества и точности регулирования. Поставленная цель достигается тем, что в самонастраивающуюся систему управления, содержащую последовательно соединенные первый сумматор, первый регулятор, усилитель мощности, электродвигатель с установленными на нем датчиком тока, датчиком скорости, датчиком ЭДС и датчиком тока возбуждения, и упругую механическую передачу, сое ненную с технологическим механизмом, выходом подключенным к датчику скорости механизма, блок возбуждения, датчик упругого момента, соединенный с упругой механической передачей, задатчик, три интегратора, второй, третий, четвертый и пятый сумматоры, выход датчика тока возбуждения соединен с первым входом блока возбуждения, выход которого соединён с входом обмотки возбуждения электродвигателя, выход датчика скорости которого соединен с первыми входами первого, второго и третьего сумматоров, выход первого интегратора соединен с вторым входом второго СУМ-. матора, введены три корректирующих усилителя, коммутатор и второй регул тор, первый вход которого соединен с вторым входом блока возбуждения и первым выходом задатчика, второй и третий выходы которого соединены соответственно с вторым и третьим входами второго регулятора, четвертый вход которого соединен с первым входом второго интегратора, вькодом датчика упругого момента, первым вхо дом четвертого сумматора и первым выходом коммутатора, .первый вход которого соединен с выходом третьего интегратора, первый вход которого соединен с выходом третьего сумматор и пятым входом второго регулятора, шестой вход которого соединен с вторым входом первого регулятора, первь входом первого интегратора и выходом датчика тока электродвигателя, датчи скорости которого соединен с седьмым входом второго регулятора, восьмой вход которого соединен с вторым вхо дом третьего интегратора и вторым выходом коммутатора, второй вход которого соединен с четвертым выходом задатчика, выход первого корректирующего усилителя соединен с вторым входом второго интегратора и девятым входом второго регулятора первый и второй выходы которого соединены соответственно с вторым и третьим входами первого сумматора, выход датчика ЭДС соединен с третьим входом первого регулятора, четвертый вход которого соединен с вторым входом первого интегратора и выходом второго корректирующего усилителя, вход которого соединен с выходом второго сумматора, выход датчика скорости технологического агрегата соединен с вторым входом третьего сумматора и первым входом пятого . сумматора, второй вход которого соединен с выходом второго интегратора выход пятого сумматора соединен с входом .первого корректирующего усилителя , третий выход коммутатора соединен с вторым входом четвертого сумматора, выход которого соединен с входом третьего корректирующего усилителя, выход которого соединен с третьим входом коммутатора. Кроме того, второй регулятор содержит интегратор, блок дифференциро вания, два сумматора, усилитель, четыре блока модуля, три функциональ ных преобразователя, два корректирующих- усилителя, пять компараторов и три управляемых ключа, при этом первый вход второго регулятора соединен с первым входом первого сумматора, последовательно с которым соединены усилитель, второй сумматор и блок дифференцирования, выход которого соединен с первым выходом второго регулятора, второй выход которого соединен с первым входом первого компаратора, вторым входом первого сумматора и выходом интегратора, первый вход которого соединен с выходом второго сумматора, второй и третий входы которого соединены с выходами соответственно первого и второго корректирующих усилителей, второй и третий входы второго регулятора соединены соответственно с первым и вторым входами первого ключа, управляющий вход которого соединен с выходом первого компаратора, второй вход которого соединен с выходом усилителя, второй вход которого соединен с выходом первого функционального преобразователя, первый вход которого соединен с вьпсодом первого ключа, четвертый вход второго регулятора соединен с первым входом второго компаратора и входом первого блока модуля, выход которого соединен с первым входом третьего компаратора, второй вход которого соединен с вьЕходом второго функционального преобразователя, первьш вход которого соединен с входом третьего функционального преобразователя, выходом второго блока модуля и вторым входом первого функционального преобразователя, пятый вход второго регулятора соединен с входом -третьего блока модуля, выход которого соединен с вторым входом второго функционального преобразователя, шестой вход второго регулятора соединен с первым входом четвертого компаратора и входом четвертого блока модуля,, выход которого соединен с первым входом пятого компаратора, второй вход которого соединен с выхо-. дом третьего функционального преобразователя, .седьмой вход второго регулятора соединен с входом второго блока модуля и вторыми входами второго и четвертого компараторов, выходы которых соединены с управляющими входами соответственно второго и третьего ключей, восьмой н девятый входы второго регулятора соединены с вторыми входами соответственно блока дифференцирования и интеграто ра, первый и второй выходы третьего компаратора соединены соответственн с первым и вторым входами второго ключа, выход которого соединен с вы ходом второго корректирующего усилителя, первый и второй выходы пято го компаратора соединены соответственно с первым и вторым входами третьего ключа, выход которого соединен с входом первого корректирующего усилителя. Связь между скоростью , , моментом током i ) электродвигателя, упругим моментом My механической передачи, скоростью UJд механизма (технологического агрегата) и статическим моме-нтом MQ на валу механизма описывается, уравнениями )-M(i| K(t|i(t)-/W (t| M,,(i)) U3(tl Л )(il где 3.,(t) - момент инерции электродвигателя-, Ф(1) - поток возбуждения электр двигателя; К - коэффициент пропорциональности между током и потоком возбуждения электродвигателяi момент инерции механизма (i) Д. - величина, обратно пропор циональная жесткости c(.t упругой механической пер дачи. Введем переменные Р и Е , оп Л 2, ределяемые соответственно уравнениямиг (t)-M (1 г .,,. ,,(t) UiLc.-,(4 J 1 vt I Величина ) определяемая ура нениам (4), учитывает влияние на скорость электродвигателя величин Э (t , Ф() , M(t) , а величина 1 78 f(t) , определяемая уравнением (5), учитывает влияние на скорость механизма величин 0 i.i и W(-t) , Поэтому описания объекта уравнения с помощью уравнений (t) - (3) и урав,нений ..UM... л , С8) являются адекватными. В дальнейшем будем использовать .уравнения (6) (8). Переходя к изображениям Лапласа уравнений (6.) - (8) для конкретных значений Р , f и Р|, и преобразовывая их, получим 1 VP) г, 6,7 Уравнения (9) - (11) определяют связь (передаточные функции) между координатами {р) , u)j{p), (р) и u)(p) системы для нулевых начальных условий. На фиг. 1 приведена схема самонастраивающейся системы управления-, на фиг. 2 - схема второго регулятора. Система содержит первый сумматор 1, первьгй регулятор 2, усилитель 3 мощности, электродвигатель А с установленными на нем датчиком 5 тока, датчиком 6 скорости, д тчиком 7 ЭДС и датчиком 8 тока возбуждения, упругую механическую передачу 9, технологический механизм 10, датчик 11 скорости механизма, блок 12 возбуждения, датчик 13 упругого момента, задатчик 14, первый интегратор 15, второй интегратор 16, третий интегратор 17, второй сумматор 18, третий сумматор 19, четвертый сумматор 20, пятьй сумматор 21, обмотку 22 возбуждения, первый 23, второй 24 и третий 25 корректирующие усилители, коммутатор 26 и второй регулятор 27. . Первый регулятор 2 содержит пропорциональное звено 28, блок 29 умножения, шестой сумматор 30, пропорционально-интегральное звено 31 и седьмой сумматор 32. Второй регулятор 27 содержит интегратор 33, блок 34 дифференцирования, восьмой 35 и девятый 36 суммато ры, усилитель 37, первый 38, второй 39, третий 40 и четвертый 41 бл ки модуля, первьм 42, второй 43 и третий 44 функциональные преобразователи, четвертый 45 и пятьш 46 корректирующие усилители, первьй 47, второй 48, третий 49, четвертьй 50 и пятый 51 компараторы и первый 52, второй 53, третий 54 управляемы ключи. В качестве технологического механизма 10 могут использоваться, например, рабочие валки прокатной клети. При этом роль упругой механи ческой передачи 9 играет шпиндель, соединяющий вал электродвигателя 4 с прокатньми валками. В качестве датчиков 6 и 11 скорости могут использоваться, например, тахогенераторы или импульсные датчики угла поворота. На выходе датчика 11 скорости наблюдается сигнал (. где u, - скорость меха низма (прокатного -валка) , а с коэффициент передачи датчика 11 ско рости. На вьгходе датчика 6 скорости наблюдается сигнал ( э скорость вала электродвигателя, а Кс - коэффициент передачи датчик 6 скорости. Датчик 13 упругого момента може быть выполнен, например, на тензометрических элементах. На выходе датчика 13 наблюдается сигнал М,К где М,..- упругий момент, а К коэффициент передачи датчика 13. Электродвигатель 4 представляет собой двигатель постоянного тока н завийимого возбуждения. Датчик 5 тока электродвигателя 4 обеспечивает на своем выходе сиг нал iK , где i- ток электродви 1с - коэффициент переда гателя, а датчика 5. Датчик 7 ЭДС (электродвижущей с лы) электродвигателя 4 формирует на своем выходе сигнал, пропорциональный ЭДС по сигналам датчика 6 скорости и датчика 8 тока возбужде ния. При этом коэффициент передачи датчика 7 выбирается из условия 1 авенства (1) произведения коэффииента усиления усилителя 3 мощости и коэффициента передачи датика 7 ЭДС. Датчик 8 тока возбуждения обесечивает на своем выходе сигнал, ропорциональный току возбуждения лектродвигателя 4. Усилитель 3 мощности обеспечиват усиление выходного канала в сответствии с передаточной функцией W ,(p)--J , (12) - коэффициент передачи и постоянная времени усилителя 3 мощности. Если передаточную функцию пропорционально-интегрального звена 31 принять w,(p) -T: т к. к где Р„ и Т, активное сопротивление и постоянная времени якорной цепи электродвигателя 4; коэффициенты, то передаточная функция W(pl контура регулирования тока якоря примет вид 1у(р) . .rv.; 1 Блок 29 умножения обеспечивает умножение выходного сигнала пропорционального звена 28 на величину К(КрЗ,поступающую на его второй вход с четвертого входа регулятора 2. При зтом, если коэффициент передачи пропорционального звена 28 принять , 4l5l ТО передаточная функция WC(P) контура регулирования скорости электродвигателя 4 примет вид WJP1 3 т-З 3 «2 Р Р ..01 Подставляя в .полином знаменателя передаточной функции (16) новую переменную SrcXjTp , получим нормированное значение характеристического полинома передаточной функции (16) «25 + 1 . (
Выражение (17) показывает, что требуемая динамика контура регулирования скорости Ыэ , задается с помощью соответствующего выбора коэффициентов л к ц и подставки их в передаточные функции (13) и (15).
Сумматор 1 обеспечивает суммирование сигнала поступающего на его первый (инверсньш) вход, с сигналами задания, поступающими на второй и третий входы сумматора При этом передаточная функция по скорости Шз относительно второго (или третьего) входа сумматора 1 имеет вид (16).
Интеграторы 15-17 имеют регулируемые постоянные интегрирования и обеспечивают интегрирование величин, поступающих соответственно на их первые входы. При этом величины их постоянных интегрирования определяются соответстпенно сигналами, поступающими на их вторые входы.
Корректирующие усилители 23-25 обеспечивают преобразование и усиление сигналов, поступающих соответственно на их входы. Закон преобразования зависит от требований к точности вьиисления параметров Е ,
йр и L. В ряде случаев достаточно пропорционального закона преобразования. Для высоких требований к точности вычислений закон преоб-разования корректирующих усилителей должен включать в себя интегралную составляющую.
Задатчик 14 обеспечивает на свои выходах 1-4 соответственно сигналы
U K,uJ, . , Uj ,,
i I r 3 требуемое значение скорости вала электродвигателя 4 (механизма 10), Мр и Л требуемые значения упругого момента соответственно при разгоне и торможеник механизма.
Регулятор 27 обеспечивает управление упругим моментом f при разгоне и торможении механизма 10 в соответствии с динамическими характеристиками контура регулирования скорости .электродвигателя 4, определенными .передаточной функцией (16) и осуществляет функции контроля и ограричения тока л Электродвигателя 4 и момента упругог
MVJ в случае превышения последними допустимых уровней.
В статическом режиме (отсутствуют режимы разгона или торможения механизма и величины i и /W,. не превосходят допустимых уровней) на первом выходе регулятора 27 наблюдается нулевой сигнал, а на втором - повторяется сигнал и., , поступающий на его первый вход.
Динамический режим разгона механизма наблюдается, когда сигнал U., превьшгает по модулю сигнал на втором выходе регулятора 27..В этом режиме. на первом выходе регулятора 27 обеспечивается сигнал (Jc (р) с (Р
КС%(Р
а на втором-и, (р)
СледоваhP
Щ,(9)
ая функция п,
режима разгона меi KC
KO
(.&
г «гР периоды времени. когда разность
МрК,
,, где циент усиления усилителя 37,. даточная функция регулятора t
мает вид
02 Р
w;,(pi-
рк
p-f.
2 J
Динамический режим торможения механизма наблюдается, когда сигнал
и меньше по модулю сигнала (J/ . В этом режиме на первом выходе регу лятора 27 обеспечивается сигнал
Uj( р1 , рК. М(р), а на втором -U (р). Следовательно,
Ej Р
передаточная функция регулятора 27 будет описываться вьфажением (17), в-котором вместо сигнала U2(p) нужно использовать сигнал U-{p).. В периоды времени, когда разность I и. |- ( U(, I - т передаточная функция регулятора 27 принимает вид (18).
Поскольку р) выбирается величиной весьма большой, .то составляющая переходного процесса, обусловленная корнем, быстро затухает и может 13 не рассматриваться в переходном процессе. В результате получим w;,(p) ,pW3i(p) Вид функции, реализуемой функци нальным преобразователен 42, oiipeделяется характеристиками электродвигателя k- и технологического про цесса, обуславливаемого самонастра вающейся системой управления. В большинстве случаев указанная фу ция имеет отрицательную производную. Функциональный преобразователь 43обеспечивает на своем выходе ве личину, изменяющуюся в функции сиг нала, поступающего на его второй вход, при этом масштаб функции (вы ходной величины функционального преобразователя 43) определяется сигналом, поступающим на первый вход функционального преобразователя 43. Функция, реализуемая функ циональным преобразователем 43, уменьшается с увеличением аргумент Характер уменьшения зависит от дин мических характеристик объекта и системы управления. Б первом прибл жении функция может быть реализована, как линейно уменьшающаяся с ростом аргумента. Функциональный преобразователь 44реализует зависимость (tuj) которая приводится в клиентском фо муляре для электродвигателя 4. Величина характеризует максималь но допустимый ток электродвигателя А . Корректирующие усилители 45 и 4 обеспечивают усиления и преобразования . сигналов , поступающих соотве ственно, на их входы. Законы преобразования входных сигналов усилителей 45 и 46 зависят от требований к точности ограничения величин i и М, . В большинстве случаев достаточно пропорциональных законо преобразования входных сигналов, более высокие требования к точност ограничения величин i и Mvj на заданном уровне можно обеспечить, вводя операции дифференцирования в законы преобразования входных сигналов усилителей 45 и 46. В слу чае пропорциональных законов преобразования функции корректирующих усилителей 45 и 46 могут выполнять соответственно компараторы 51 и 49. При этом схема регулятора 714 ;27 может быть упрощена за счет исключения из нее корректирующих усилителей 45 и 46. . Рассмотрим работу системы в динамическом режиме на примере разгона механизма 10 (электродвигателя 4) до новой установившейся скорости. Режим разгона в системе начинается с момента увеличения по модулю (например, скачком) сигнала U на первом входе задатчика 14, При . этом на втором выходе задатчика 14 наблюдается сигнал U2 - /Wp , содержащий информацию о требуемом значении Мр момента упругого y в процессе разгона. Передаточная функция (p) для момента упругого по второму (или третьему) входу регулятора 27 определится выражением М(р)к Му(р) ()«з.(р)(рП ) где W.,(p) , WC(P) и 3, (pi- передаточные функции, определяемые уравнениями (10), (16) и (17). Уравнение /19) показывает, что в процессе разгона механизма 10 поведение ЛЛ( будет определяться динамическими характеристиками передаточной функции WC(P) иб зависит от вариаций параметров , С и f , так как в системе управления непрерывно осуществляется определение фактических значений параметров 2 , и , и обеспечивается соответствующая перестройка параметров регуляторов 2 и 27 практически синхронно с вариациями параметров . , Это обеспечивает благодаря тому, что время определения значений 6, Чс во много раз меньше времени переходного процесса системы, определяемого передаточной функцией .. По мере разгона механизма 10 с заданным значением момента упругого сигнала U. на втором вькоде регулятора 27 возрастает, .приближаясь к значению сигнала U В момент времени, когда- |U |-|Uj|r-EL ., передаточная функция W,(p) принимает вид „{p)---pW ip), ) и система в момент наступления равенства U U/. возвращается в статическое состояни соответствующее новому, установившемуся значению скорости цс Работа системы управления в режиме тормол;еяия механизма 10 подоб работе, для режима разгона. Рассмотрим динамический режим ра боты системы, обусловленный возмущающими воздействиями, например, изменением момента нагрузки на вал механизма 10. Изменение момента , нагрузки на валу-механизма 10 прив дит к изменению Ыд ,. и соответствующими.изменениями пар метров Е, и 2 Изменение параметра К приводит к перестройке регулятора 2, вызывая изменения то ка i , стабилизирующие скорость и, в конечном итоге, скорост м/ механизма. При этом регулятор 27 непрерывно следит за текущим значением М , Если изменения момента нагрузки на-валу механизма носят плавный характер, то, как правило, стабилизирующий эффект, обусловленный перестройкой регулятора 2, является достаточным для стабилизации скорости lu . Быстрыеи значительные по амплитуд изменения момента нагрузки на валу механизма вызывают выход Mv за допустимые (контролируемые регулятором 27) значения. В данном случа в работу вступает регулятор 27, ко торый, корректируя свои.выходные сигналы, изменяет скорость так, чтобы противодействовать рост М. модуля /v , резко уменьшая колебательностьЛЛу при. переходе к новому установившемуся значению. Х рактер перехода Мч, к новому уста новившемуся значению зависит от полосы пропускания (частоты среза) передаточной функции (р) Если полоса пропускания перекрывает значение д - - , то характер переН ) . ходного процесса Д, будет определяться динамическими характеристиками передаточной функции )(/р(р) Поэтому при конструировании систем необходимо добиваться наименьшего значения параметра Т передаточно функции (P) конструктивные параметры механизма 10, определяющие значения Ij к с должны выбираться (проектироваться) так, чтобы значение частоты , , пере к{)ывалось полосой проГ1ускания передаточной функции WclplРассмотрен динамический режим работы, обусловленньш изменением момента нагрузки на валу механизма. Порядок работы системы остается анал.огичным и для других возмущаюuijtx воздействий (3 , J с и ф и т.д.), так как изменения последних распознаются системой через соответствующие изменения обобщенных параметров i 2 с и Мч,, Регулятор 27 непрерывно контролирует модуль тока i электродвигателя 4. Если модуль тока j по каким-либо причинам, как правило аварийным, начнет превосходить допустимые значения, то регулятор 27, корректируя свои выходные сигналы, противодействует выходу тока i за допустимь е пределы. Если причина, вызывающая увеличения модуля тока i , самоустраняется, то регулятор 27 автоматически возвращает систему в исходное состояние на заданный уровень скорости. Рассмотрим работу регулятора 27 . Регулятор может работать в четырех динамических режимах: разгона, торможения, ограничения момента упругого MVJ и ограничения тока ( двигателя. Динамический режим разгона наступает, когда сигнал U., , поступаюШJ й на первый вход регулятора 27, превзойдет по модулю сигнал U(, , присутствующий на его втором выходе. Допустим, что в исходном состоянии (статическом) на первом входе и втором выходе присутствовали положительные сигналы и и .В момент увеличения сигнала (J-, (например, скачком) на выходе сумматора 35 и усилителя 37 появляются положительные сигналы. На выходе компаратора 47 обеспечивается сигнал логической 1 и подключается первый вход ключа 52 к его выходу. Сигнал U2 с второго входа регулятора 27 через функциональный преобразователь 42 поступает на второй вход усилителя 37, определяя уровень ограничения выходного сигнала усилителя 37. Выходной сигнал усилителя 37, проходя сумматор 36, дифференцируется блоком 34, интегрируется интегратором 33 и поступает соответственно на первьй и второй выходы регулятора 27. На выходе интегратора 33 наблюдается линейно растущий сигнал, пока усилитель 37 находится S состоянии насыщения. Сигнал на выходе сумматора 35 линей но уменьшается, приближаясь к нулю В момент дс(2;тижения выходным сигналом сумматора 35 з нач е ни я i Ф А ; усилитель 37 выходит из насыщения и происходит согласование сигналов и и Uf, . В момент равенства i Ь регулятор 27 возвращается в статическое состояние. Динамический режим торможения в регуляторе 27 наступает в момент нарушения равенства 11 U путем уменьшения (например, скачком) моду сигнала Ui При этом на выходе ко паратора 47 обеспечивается сигнал логического О, и уровень ограниче ния выходного сигнала усилителя 37 будет определяться сигналом (Jj , поступающим на третий вход регулято ра 27. В режиме торможения модуль выходного сигнала интегратора 33 линейно уменьшается. В остальном ра бота регулятора 27 в режиме торможения подобна его работе в режиме разгона. I . Динамический режим ограничения Мч) в регуляторе 27 наступает, ког сигнал на первом входе компаратора 49 превзойдет сигнал, поступающий на его второй вход-. При этом на пе вом и втором выходах компаратора 4 появляются соответственно положительный и отрицательный сигналы, равные по модулю. Компаратор 48 и ключ 53 подключают вход корректиру щего усилителя 46 к первому или вт рому выходу компаратора 49 Соответ ственно при отрицательном и положительном значениях сигнала М К , присутствующего на четвертом входе регулятора 27. Выходной сигнал ком паратора 49, проходя корректирующи усилитель 46 и сумматор 36, диффер цируется блоком 34, интегрируется интегратором 33 и поступает соотве ственно на первый и второй выходы регулятора 27. Изменения выходных сигналов регулятора 27 приводят к уменьшению модуля сигнала МуК- , поступающего на его четвертый вход и исчезновению сигналов на выходах компаратора 49. Выходной сигнал ин тегратора 33, поступая на второй вход сумматора 35, обеспечивает согласование сигналов U и U . В момент, наступления равенства и, и регулятор 27 возвращается в статическое состояние. Динамический режим ограничения тока i двигателя в регуляторе 27 наступает, когда сигнфт на первом входе компаратора 51 превзойдет сигнал, поступающий на его второй вход. При этом на первом и втором выходах компаратора 51 появляются соответственно положительный и отрицательный сигналы, равные по модулю. Компаратор 50 -и ключ 54 подключают вход корректирующего ус илителя 45 к первому или второму выходу компаратора 51 соответственно при отрицательном и положительном значениях сигнала iky присутствующего на . шестом входе регулятора 27. Выходной сигнал компаратора 51, проходя корректирующий усилитель 45 и сумматор 36, дифференцируется блоком 34, интегрируется интегратором 33 и поступает соответственно на первый и второй выходы регулятора 27. Изменение выходных сигналов регулятора 27 приводит к уменьшению модуля сигнала ik , поступающего на его шестой вход, и исчезновению сигналов -на выходах компаратора 51. Выходной сигнал интегратора 33, поступая на второй вход сумматора 35, обеспечивает согласование сигналов (J и мент наступления равенства регулятор 27 возвращается в статическое состояние. Возможны случаи,когда указанным динамическим режимам предшествует не статический, а один из динамических режимов регулятора 27. Существенные отличительные признаки (введение регулятора, корректирующих усилителей и соответствующее изменение связей между элементами) предлагаемого устройства обеспечивают последнему положительный эффект: самонастройку от вариаций жесткости упругого элемента и момента инерции на его выходе. Следствием положительного эффекта при применении предлагаемого устройства вместо известных является технико-экономический эффект. При этом величина экономического эффекта во многом определяется особенностями технологического процесса 19 и технологических агрегатов, для управления которыми используется предлагаемое устройство. .Рассмотрим в качестве базового объекта широко используемые в металлургическом производстве для управления скоростью прокатных вал ков (главных приводов клетей) подчиненные системы управления с посл довательной коррекцией. Эксперимен тальное исследование таких систем показало, что отсутствие в последних (как и в известном устройстве) самонастройки (настройки) для пара метров упругой механической переда чи и связанных с ней моментов инер ции вызывает в кинематических пере дачах последних крутильные колебания. При этом амплитуда колебаний упругого момента может достигать 3,7 где Мц- номинальный крут щий момент прокатного валка. Установлено, что. крутильным колебаниям соответствуют- неустойчивые режимы прокатки: буксовка и незахват металла. Явления незахвата металла при прокатке приводят к увеличению некондиционной части, подлежащей обрезанию, переднего и заднего кон цов раската. Явление буксовки приводит к появлению в раскате бракованных участков, подлежащих вырезанию, или снижает качество (сортность) проката. Для обеспечения надежной работы электродвигателя в условиях крутильных колебаний пришлось усилить элементы якоря, имевшие недостаточный запас прочности. Кроме того, в ряде слу20 .. чаев крутильные колебания приводят к поломке кинематических звеньев. Для предотвращения аварийных ситуаций (поломок) в этих условиях приходится в кинематическую цепь устанавливать предохранительные муфты, что усложняет и повьшает стоимость технологического оборудования. Практически 90% разрушений деталей машин имеют усталостный ха.рактер и происходят в результате действия, переменных динамических нагрузок, ярким примером которых являются крутильные колебания, т.е. крутильные колебания снижают долговечность технологического оборудования. Таким образом, применение предлагаемого устройства вместо базового в прокатном производстве, позволяет получить экономический эффект за счет удешевления конструкций электродвигателя и технологического оборудования (отпадает необходимость усиления элементов якоря электродвигателя и кинематических передач, не требуется установка предохранительных муфт) и увеличения срока эксплуатации электродвигат.еля и технологического оборудования; снижение расхода металла в обрезь (брак) и повьш1ение качества (сортности) проката достигается ликвидацией неустойчивых режимов прокатки. Повышение производительности технологического оборудования достигается сокращением простоев (аварий, замена элементов предохранительных муфт и т..д.).
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
