(54) СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Система регулирования скорости | 1983 |
|
SU1092465A1 |
| Вентильный электропривод постоянного тока | 1981 |
|
SU974535A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2015 |
|
RU2584005C1 |
| Управляемый электропривод | 1980 |
|
SU1034016A1 |
| Устройство для защиты от изменения заданной скорости вращения электропривода постоянного тока | 1985 |
|
SU1377957A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1984 |
|
SU1159139A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
Изобретение относится к системам автоматического управления, а именно к управлению электроприводом постоянного тока, и предназначено для инерционных механизмов, имеющих жесткие ограничения на весогабаритные характеристики, делающие невозможной установку тахогенератора.
Известен электропривод, содер«жащий последовательно соединенные датчик скорости, усилитель, двигатель постоянного тока с приводным механизмом и обеспечивающий получение нескольких фиксированных рабочих скоростей. В этом приводе скорость вращения двигателя регулируется изменением напряжения питания обмотки якоря. При широком диапазоне регулирования скорости вращения нижний предел скорости ограничен величиной зоны нечувствительности двигателя. При приближении к нижнему пределу скорости погрешность, вносимая зоной нечувствительности, возрастает, достигая величины 100% от текущего значения скорости и выше 1 .
Недостатками этого привода является небольшой диапазон и низкая точность регулирования рабочей скорости, обусловленные отсутствием обратной связи по скорости.
Наиболее близкой по технической сущности к изобретению является система, содержащая последовательно соединенные задатчик скорости, сум матор и усилитель, а также мостовую схему с обмоткой якоря двигателя в одном из плеч, диагональ питания коIDторой соединена с выходом усилителя, а измерительная диагональ - со вторым .ВХОДОМ сумматора. В системе с помощью мостовой схемы, в одно из плеч которой включена обмотка якоря
15 двигателя, выделяется ЭДС, индуцируемая во вращающемся якоре двигателя, пропорциональная скорости вращения. Ток якоря двигателя независимого возбуждения определяется с помо20щью следующего выражения
25 где Uq - напряжение питания якоря
двигателя; п - скорость вращения якоря
двигателя;
RQ - сопротивление обмотки яко30ря двигателя;
; с - коэффициент пропорциональ:НОСТИ.
Мостовую схему балансируют при заторможенном якоре, тогда при вращении якоря на измерительной диагона1ЛИ мостовой схемы появляется напряжение, пропорциональное скорости зращения, которсэе используется в качестве сигнала обратной связи по ско:рОСТИ,
Вследствие того, что напряжение ;Питакия якоря двигателя и ЭДС, про;порциональная скорости его вращения ;(слагаемое сп.в приведе.шом выше вы ражении), имеют разные знаки, возникает опасность, что при разбалан:сировке мостовой схемы, вызванной изменениями параметров ее элементов под действием внешних возмущений, может возникнуть положительная об;ратная связь по напряжению питания, что приведет к возникновению автоколебаний системы. Вследствие этого, во-первых глубина обратной связи по .скорости не может быть достаточно большой, а во-вторых балансировка моста не может быть сделана полной, так как должен быть обеспечен запас устойчивости с учетом изменения параметров составляющих мостовую схему элементов. Поэтому не может быть обеспечена высокая точност регулирования скорости, а также, вследствие невозможности точной балансировки моста, невозможно обеспечить введение обратной связи при . малых скоростях вращения двигателя, так как сигнал обратной связи появляется только начиная с некоторой величины скорости вращения,- после компенсации сигнала небалансаC J, Недостатком известной системы является низкая точность регулирования рабочей скорости, особенно на нижнем пределе регулируемой скорости. Кроме того, в известной системе -наличие дополнительного резистора в цепи якоря двигателя приводи к увеличению потерь и к дополнительному нагреву системы.
Целью изобретения является повышние точности системы без уменьшения диапазона скоростей.
Поставленная цель достигается тем, что в систему, содержащую дви,гатель постоянного тока, кинематически связанный с приводным механи.змом,,и последовательно соединенные задатчик скорости, первый сумматор и усилитель, введены первый ключ, несимметричный мультивибратор и последовательно соединенные второй сумматор, второй ключ, интегратор и инвертирующий усилитель, йричем выход, усилителя через первый ключ связан со входом двигателя постоянного тока и первым входом второго сумматора, выход инвертирующего усилителя соединен со вторыми входами первого и второго сумматоров, а управляющие входы первого и. второго ключей соединены соответственно с первым и вторым выходами несимметричного мультивибратора.
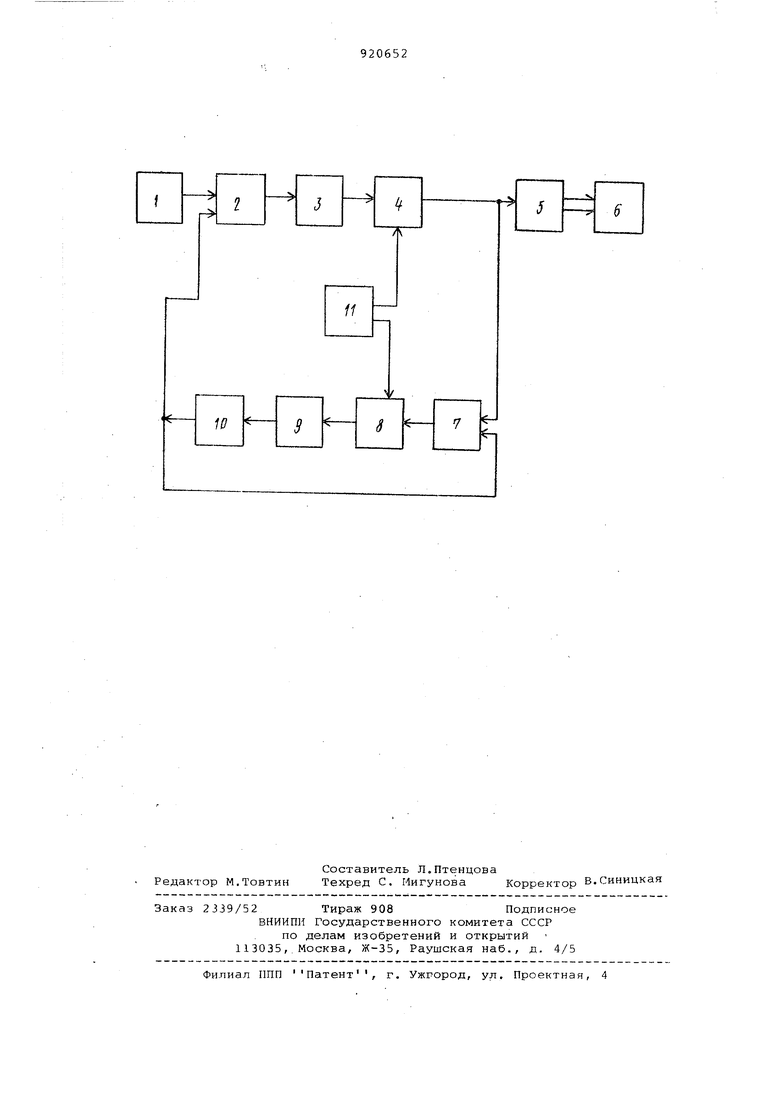
На чертеже представлена блок-схема предлагаемой системы.
На чертеже задатчик 1 скорости соединен с первым входом первого сумматора 2, выход которого соедине со входом усилителя 3, выход которого через, первый ключ 4 связан со входом двигателя 5 постоянного тока, с валом которого соединен приводной механиз.л 6. При этом вход двигателя 5 соединен с первым входом второго сумматора 7, выход которого через второй ключ 8 связан со входом интегратора 9, выход которого соедине со входом инвертирующего усилителя 10, к выходу которого подключены вторые вхо.ды сумматоров 2 и 7. Первый и второй выходы несимметричного мультивибратора 11 соединены соотвественно с управляющими входами ключей 4 и 8,
Принцип работы системы заключается в следующем. .
Напряжение сигнала задатчика 1 скорости поступает на первый вход сумматора 2, на - второй вход которого поступает напряжение с выхода инвертирующего усилителя 10. В первый момент после пуска напряжения н выходе инвертирующего усилителя 10 равно нулю, поэтому на выходе сумматора 2 напряжение равно напряжению сигнала задатчика 1 скорости. Это напряжение поступает на вход усилителя 3, с выхода которого идет на вход ключа 4. Когда мультивибратор 11 замыкает ключ 4, напряжение с выхода усилителя 3 поступает на вход двигателя 5 постоянного тока, который начинает вращаться вместе с механизмом 6. Одновременно напряжение с выхода усилителя 3 через замкнутый ключ 4 прикладывается к первому входу сумматора 7, но поскольку ключ 8 в эту часть периода колебаний мультивибратора 11 оказывается разомкнутым, то напряжение с выхода сумматора 7 не достигает входа интегратора 9 и не запоминается на нем. Далее мультивибратор 11 переключается, при этом ключ 4 размыкается, а ключ 8 - замыкается. Вследствие этого двигатель 5 отключается от выхода усилителя 3, но по действием кинематической энергии вращающихся масс механизма 6 продолжает вращаться, вследствие чего, поскольку обмотка возбуждения двигателя 5 остается подключенной к сети, он переходит в генераторный режим и на входе двигателя 5 появляется напряжение, пропорциональное.скороети его вращения, которое поступает на первый вход сумматора 7, а с его выхода через замкнутый в эту часть периода работы мультивибратора 11 ключ 8 - на вход интегратора 9. На выходе интегратора 9 появляется возрастающее напряжение,- которое через инвертирующий усилитель 10 поступает на второй вход сумматора 7, вычитаясь в нем из напряжения, пропорционального скорости вращения двигателя 5. На входе интегратора 9 напряжение будет существовать до тех пор, пок либо разомкнется ключ 8, что произойдет при очередном переключении мультивибратора И, либо разностное напряжение на выходе сумматора 7 не станет равным нулю, что говорит о том, что напряжение на выходе инвертирующего усилителя 10 достигло величины напряжения, генерируемого двигателем 5. После переключения мультивибратора 11, когда ключ 4 замкнут, а ключ 8 разомкнут, двигатель 5 снова переходит в двигательный режим работы, -а напряжение, заполненное в интеграторе 9, поступает на вход сумматора 2 в качестве сигнала обратной связи по скорости. Если напряжение на выходе инвертирующего усилителя 10 не достигает величины напряжения, вырабатываемого двигателем 5 в генераторном режиме работы, за один период колебаний мультивибратора 11, то оно достигает этой величины за два или несколько периодов. Длительность генераторного режима работы двигателя 5 на порядок меньше длительности двигательного режима, поэтому мощность на валу двигателя 5 уменьшится незначительно. При практической аппаратурной реализации системы ключи 4 и 8 могут быть выполнены как в контактном исполнении - в виде контактных групп электромагнитных реле, так и , в бесконтактном исполнении - в виде полупроводниковых, или оптоэлектронных ключей, причем если место включения ключа 8 строго определено и имеет принципиальное значение для работы системы, то ключ 4 быть включен и перед усилителем 3 (только
в том случае, если усилитель 3 не имеет достаточного напряжения на выходе) .
Таким образом, предлагаемая система обеспечивает получение высокой точности регулирования величины рабочей скорости в связи с тем, что обратная связь по скорости может быть сделана любой требуемой величины, так как изменение параметров источника сигнала обратной связи по скорости в широких пределах не явится причиной потери системой устойчивости.
Формула изобретения
Система регулирования скорости электропривода постоянного тока, содержащая двигатель постоянного тока, кинематически связанный с прводным механизмом, и последователно соединенные задатчик скорости, первый сумматор и усилитель, отличающаяся тем, что, с целью повышения точности системы, она содержит первый ключ, несимметричный мультивибратор и последовательно соединенные второй сукматор второй ключ, интегратор и инвертирующий усилитель, причем выход усилителя через первый ключ связан со входом двигателя постоянного тока и первым входом второго сумматора, выход инвертирующего усилителя соединен со вторыми входами первого и второго сумматоров, а управляющие входы первого и второго ключей соединены соответственно с первым и вторым выходами несимметричного мультивиЪратора. .
Источники информации, принятые во внимание при экспертиз
