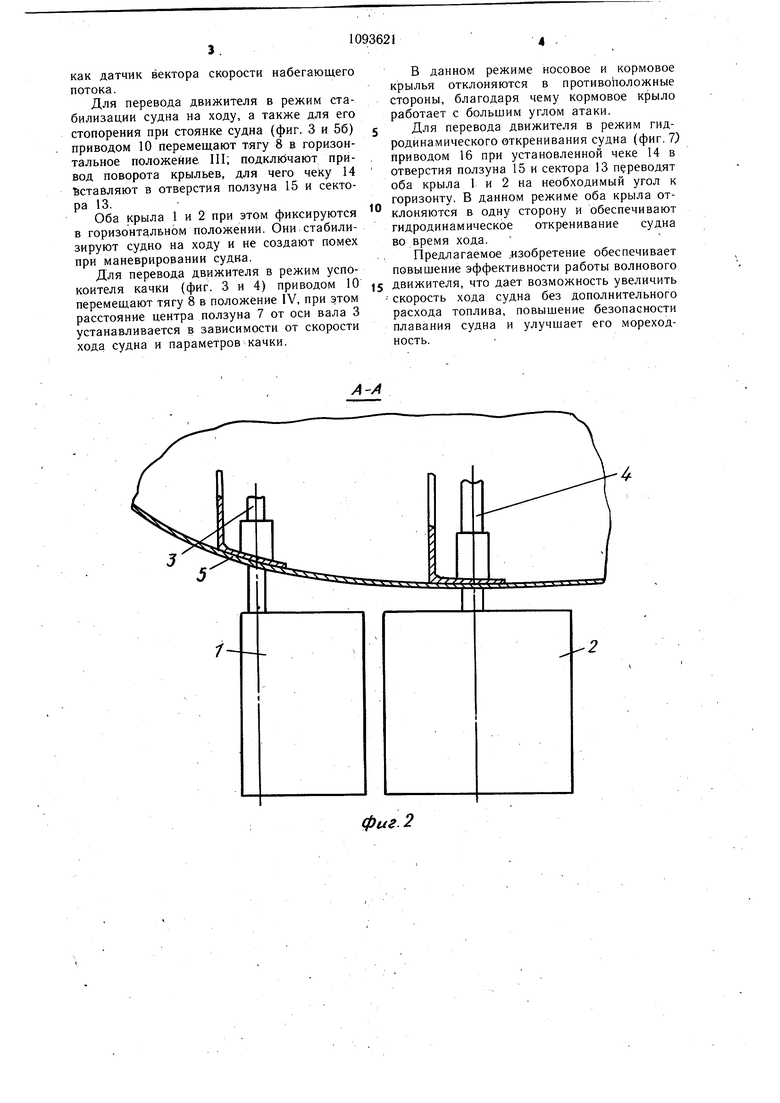
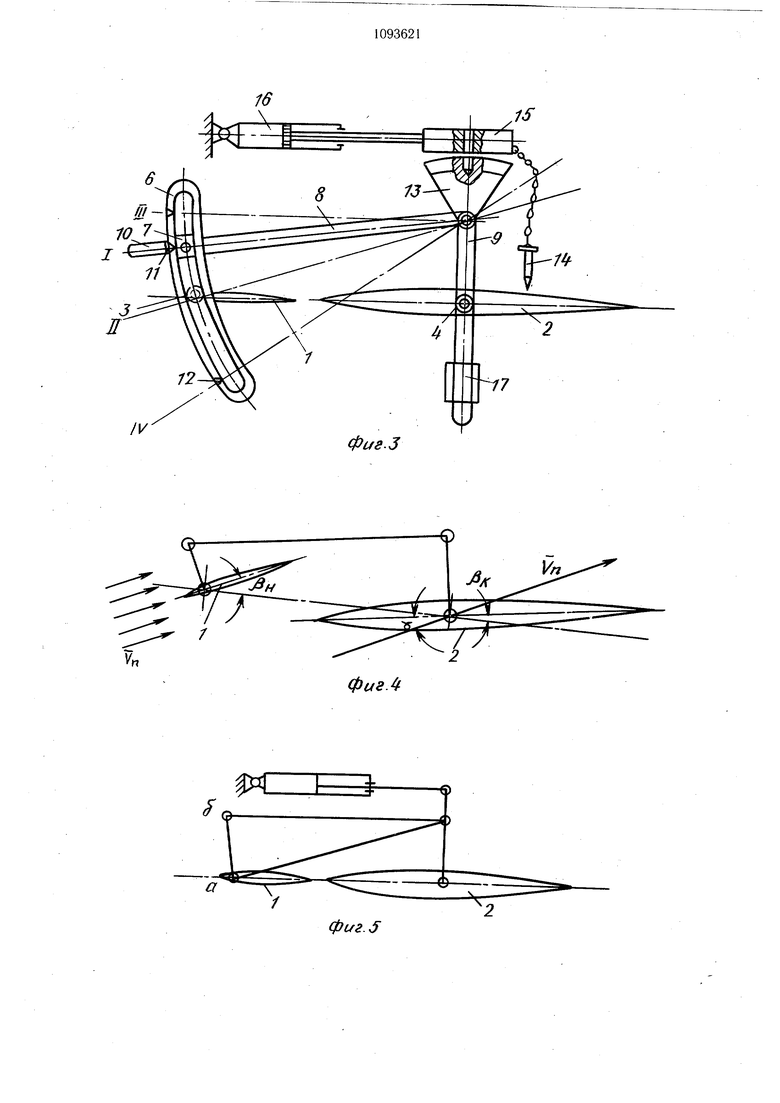
Изобретение относится к судостроению, в частности к судовым движителям, использующим энергию морских волн. Известен судовой волновой движитель, содержащий небалансирное носовое и балансирное кормовое крылья, жестко установленные на валах, которые выступают за борт судна перпендикулярно его диаметральной плоскости и щарнирно связаны тягой и жестко закрепленным на свободном конце вала кормового крыла рычагом 1. Недостатком судового волнового движителя является то, что у него не обеспечена работа в оптимальном режиме при различных сочетаниях скорости кода судна и параметров волн, а это приводит к снижению эффективности его работы. Цель изобретения - повыЩение эффективности движителя в работе путем обеспечения возможности его регулирования при различных сочетаниях скорости хода судна и параметров волн. Цель достигается тем, что судовой волновой движитель, содержащий небалансирное носовое и балансирное кормовое крылья, жестко установленные на валах, которые выступают за борт судна перпендикулярно его диаметральной плоскости и шарнирно связаны тягой и жестко закрепленным на свободном конце вала кормового крыла рычагом, снабжен дугообразной направляющей жестко связанной со свободным концом вала носового крыла и проходящей через ось этого вала, и фиксируемым в направляющей ползуном, с которым шарнирно связана упомянутая тяга, при этом центр радиуса кривизны направляющей расположен в центре шарнирного соединения тяги с при вертикальном положении последнего. На фиг. 1 схематично изображено размещение волнового движителя на судне; на фиг. 2 - разрез А-А. на фиг. 1; на фиг. 3-волновой движитель, вид сбоку; на фиг. 4 - кинематическая схема работы волнового движителя в режимах движителя и успокоителя качки; на фиг. 5 - то же (а - в режимах измерителя параметров качки и стабилизации судна на ходу; б - в режимах стабилизации судна на ходу и при стоянке судна); на фиг. 6 - то же, в режиме успокоителя качки; на фиг. 7 - то же, в режиме гидродинамического откренивания судна. При этом, У„ - вектор скорости набегающего потока; о - угол атаки набегающего потока; я - угол наклона носового крыла к горизонту; - то же, кормового крыла, Судовой волновой движитель содержит . небалансирное носовое 1 и балансирное кормовое 2 крылья, установленные соответственно на валах 3 и 4, которые выступают за борт 5 судна перпендикулярно его диаметральной плоскости. На свободном конце вала 3 жестко закреплена дугообразная направляющая 6, проходящая через ось этого вала. С направляющей 6 сопряжен ползун 7, щарнирно связанный с тягой 8, которая щарнирно связана с рычагом 9, жестко установленным на свободном конце вала 4. Центр радиуса кривизны направляющей 6 совпадает с центром щарнирного соединения тяги 8 с рычагом 9 при вертикальном положении последнего. С ползуном 7 жестко связан привод 10 с фиксатором 11 для переключения режимов работы движителя. Фиксатор 11 входит в зацепление с фиксирующими гнездами 12, выполненными на направляющей 6. На ве|эхнем конце рычага 9 жестко закреплен сектор 13 который чекой 14 через ползун 15 соединяется с приводом 16 поворота крыльев, а на нижнем конце рычага 9 установлен противовес 17. В ползуне 15 и секторе 13 выполнены отверстия, которые расположены соосно при нахождении рычага 9 в вертикальном положении и служат для установки в них чеки 14. Часть чеки 14, взаимодействующая с внутренней поверхностью отверст1 я в секторе 13, выполнена конусообразной, дает возможность обеспечивать поворот сектора на заданную величину при движении ползуна 15. Возможно несколько положений тяги 8 (фиг. 3): I - положение тяги в режимах движителя и успокоителя качки; II - то же, в режимах измерителя параметров качки и стабилизации судна на ходу; III - то же, в режимах стабилизации судна на ходу при стоянке судна и гидродинамического откренивания судна; IV - то же, в режиме успокоителя качки. Судовой волновой движитель работает следующим образом. Для осуществления его работы в режимах движителя и успокоителя качки (фиг. 3 и 4) приводом 10 перемещают тягу 8 с ползуном 7 в положение I на расстояние от вала 3, при котором обеспечивается максимальная тяга при заданной скорости хода судна и параметрах волны. При этом крыло 1 работая во флюгерном режиме, устанавливается вдоль потока под yглoMjб к горизонту и через вал 3, дугообразную направляющую 6, ползун 7, тягу 8 и рычаг 9 передает усилие на крыло 2, поворачивая его на уго Д(, который меньше . За счет угла атаки«( набегающего потока создается подъемная сила, горизонтальная составляющая которой направлена вперед. Для перевода движители в режим измерения параметров качки (фиг. 3 и 5а) приводом перемещают тягу 8 с ползуном 7 в положение II. При этом крыло 2 оказывается зафикси.рованным в горизонтальном положении и выполняет функцию стабилизатора судна, а крыло 1 работает во флюгерном режиме.
как датчик вектора скорости набегающего потока.
Для перевода движителя в режим стабилизации судна на ходу, а также для его стопорения при стоянке судна (фиг. 3 и 56) приводом 10 перемещают тягу 8 в горизонтальное положение III; подкл1бчают привод поворота крыльев, для чего чеку 14 вставляют в отверстия ползуна 15 и сектора 13.
Оба крыла 1 и 2 при этом фиксируются в горизонтальном положении. Они стабилизируют судно на ходу и не создают помех при маневрировании судна.
Для перевода движителя в режим успокоителя качки (фиг. 3 и 4) приводом 10 перемещают тягу 8 в положение IV, при этом расстояние центра ползуна 7 от оси вала 3 устанавливается в зависимости от скорости хода судна и параметров качки.
В данном режиме носовое и кормовое крылья отклоняются в противоположные стороны, благодаря чему кормовое крыло работает с большим углом атаки.
Для перевода движителя в режим гидродинамического откренивания судна (фиг. 7) приводом 16 при установленной чеке 14 в отверстия ползуна 15 и сектора 13 переводят оба крыла 1 и 2 на необходимый угол к горизонту. В данном режиме оба крыла отклоняются в одну сторону и обеспечивают гидродинамическое откренивание судна во время хода.
Предлагаемое .изобретение обеспечивает повышение эффективности работы волнового движителя, что дает возможность увеличить скорость хода судна без дополнительного расхода топлива, повышение безопасности плавания судна и улучшает его мореходность.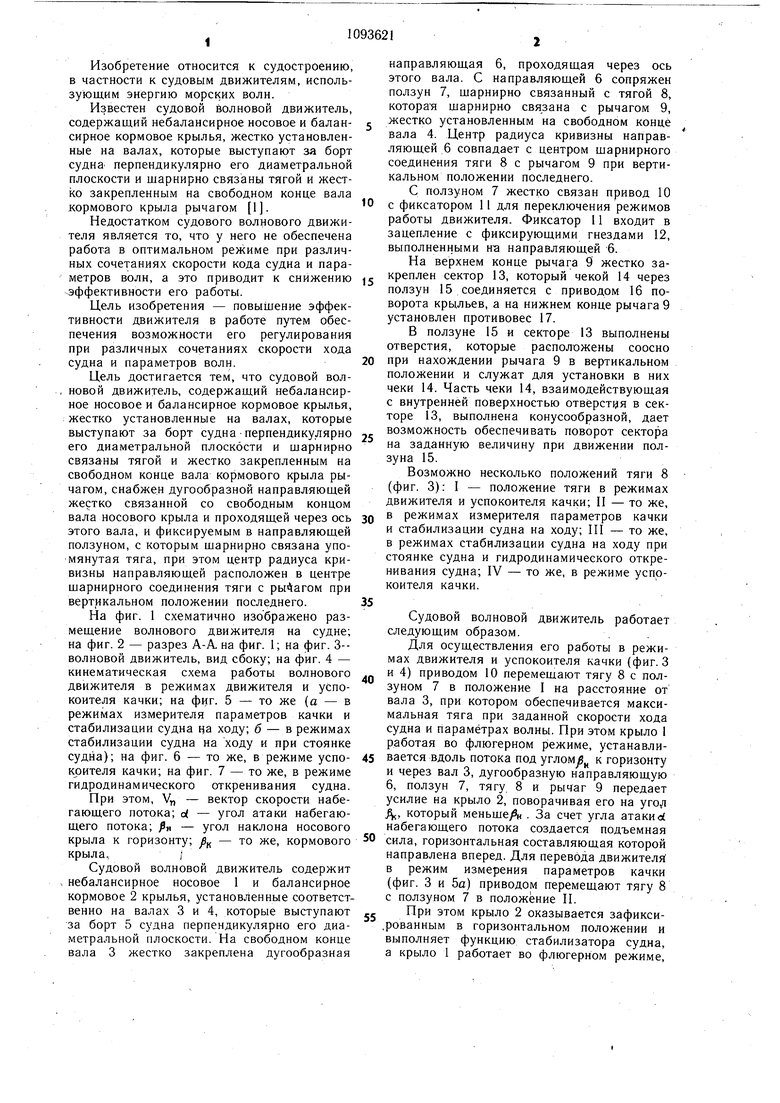
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой волновой движитель | 1983 |
|
SU1131770A2 |
| Судоуй волновой движетель | 1974 |
|
SU592671A1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 1990 |
|
RU2034739C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 1998 |
|
RU2143376C1 |
| ВОЛНОВОЙ ДВИГАТЕЛЬ-ДВИЖИТЕЛЬ | 1998 |
|
RU2143377C1 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| Судовой волновой движитель | 1990 |
|
SU1794801A1 |
| КАЧЕХОД И КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2392177C1 |
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2034741C1 |
| ПЛАТФОРМА-ВОЛНОХОД | 1994 |
|
RU2081030C1 |

СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ, содержащий небалансирное носовое и балансирное кормовое крылья, жестко установленные на валах, которые выступают за борт судна перпендикулярно его диаметральной плоскости и шарнирно«связаны тягой и жестко закрепленным на свободном конце вала кормового крыла рычагом, отличающийся тем, что, с целью повышения эффективности движителя в работе путем обеспечения возможности его регулирования при различных сочетаниях скорости хода судна и параметров волн, он снабжен дугообразной направляющей, жестко связанной со свободным концом вала носового крыла и проходящей через ось этого вала, и фиксируемым в направляющей ползуном, с которым щарнирно связана упомянутая тяга, при этом центр радиуса кривизны направляющей расположен в центре щарнирного соединения тяги с рычагом, при вертикальном положении последнего. IV СА:) О5 Ю V V S фиг.
фиг 2
фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Судоуй волновой движетель | 1974 |
|
SU592671A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
