2, Устройство по п. 1, отличающееся тем, что блок коррекции содержит последовательно соединеиные датчик действительного параметра, элемент сравнения, пороговый элемент, фазосдвигакядий блок, генератор коротких импульсов и генератор
импульсов управления, выходы которого подключены к первым выходам блока, вход датчика действительного параметра соединен с вторым входом блока, второй вход элемента сравнения подключен к первому входу блока, а выход - к второму выходу блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНО-ИМПУЛЬСНОЙ ОБРАБОТКИ РАСТЕНИЙ | 2014 |
|
RU2573349C1 |
| Устройство для группового управления металлорежущими станками | 1973 |
|
SU485418A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БУРИЛЬИОЙ УСТАНОВКОЙ | 1973 |
|
SU368395A1 |
| Устройство для автоматического регулирования процесса согидролиза | 1986 |
|
SU1346639A1 |
| Устройство для программного регулирования температры | 1986 |
|
SU1374194A1 |
| Устройство для автоматической фокусировки оптической системы записи-воспроизведения информации | 1990 |
|
SU1802877A3 |
| Устройство защиты и автоматики распределительной подстанции | 1988 |
|
SU1584023A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU750438A1 |
1.-УСТРОЙСТВО ДЛЯ ПРОГРАМ ИНОГО УПРАВЛЕНИЯ,содержащее механизм перемещения, последовательно соединенные Программоноситель, оптичегки связанный с фотоголовкой считывания, и элемент сравнения, а также блок г I X Г V--H L. коррекции, первым входом соединенный с задатчиком параметра, и последовательно соединенные усилитель мощности и элемент сравнения, отличающееся тем, что, с целью повьлнения точности отработки программа, в него введены первый и второй операционные усилители, три ключевых элемента, два накопительных конденсатора и усилитель-повторитель, выходом соединенный с входом усилителя мощности, а входом через першлй ключевой элемент и операционный усилитель с выходом .второго ключевого элемента, вход которого подключен к выходу блока сравнения, инвертирующий вход операционного усилителя соединен с входом третьего ключевого Л и с первым накопителышм конденсатором, неинвертируювдий вход второго операционного усилителя подключен к выходу первого операционного усилителя, а инвертирующий вход заземлен. ff I j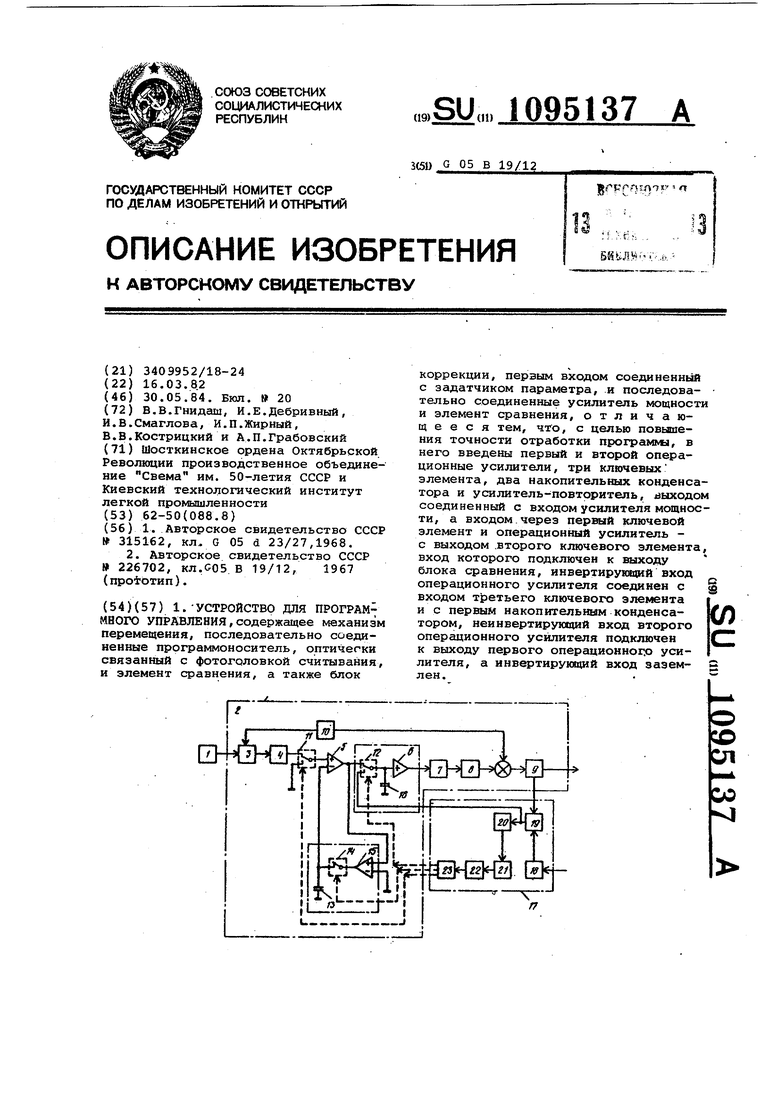
Изобретение относится к конструк ции автоматических программных устройств и может быть использовано для автоматического регулирования различных технологических параметро в частности для обеспечения оптимал кого напряженного состояния ПЭТФ пленки, используется для из готовления фотоматериалов и магнитных лент. Наиболее острой проблемой, относ цейся к технологии производства магнитных лент, является процесс изготовления качественной ПЭТФ основы. Особенно большой брак основы, необходимой для качественных магнит ныХ лент, получается на стадии намотки ее в рулон (пйтянутость кромок, появление волн по ширине полот на и ,т.д.). Указанный брак устраняю с помощью автоматического программного устройства, осуществляющего управление процессом намотки пленки в рулон. Известен автоматический программный регулятор, выполненный на базе автоматического регистрирующего измерительного прибора, задатчик которого следит за программной линией на диаграммной бумаге с помощью фотоследящей системы 1J . Недостатком указанного устройства является невысокая точность обработки програгФил, обусловленная влиянием внешних условий (изменение температуры, влажности, напряжения питания сети и т.д.) , в результате чего происходит отклонение программи руемого параметра от заданной величиньР. Кроме того, указанное устройст во невозможно использовать для программирования параметров, динамические свойства которых отличаются от динамических свойств автоматического регистрирующего прибора, на базе которого выполнено указанное устройство, поскольку фотоследящая система подключена непосредственно к исполнительному органу системы регулирова ния. Наиболее близким по технической сущности к предлагаемому является автоматическое программное устройство, содержащее узел программоносителя, оптически связанную с ним фотоэлектрическую следящую систему считывания программы, включающую задатчик программируемого параметра и последовательно соединенные схему сравнения и усилитель мощности, а также узел коррекции, вьшолненный в виде подвижного валика, перемещающего узел програл«моносителя вверх или вниз относительно фотоследящей головки 23 . Гй исутствие в данном устройстве узла коррекции повьниает по сравнению с описанным выше программным регуля-. тором точность отработки программы, а благодаря тому, что фотоследящая головка непосредственно не связана с исполнительным механизмом, динамические свойства программируемого параметра не оказывают влияния на работу программного устройства и его можно использовать для программирования различных параметров технологических процессов. Однако точность отработки программы и в этом устройстве недостаточно высока, поскольку корректирование выходного сигнала при считывании заданной програквиы осуществляется вручную путем поворачивания лимба корректора на определенный угол по часовой или против часовой стрелки. Цель изобретения - повышение точности отработки программы. Поставленная цель достигается тем, что в устройство для программного управления, содержащее механизм перемещения, последовательно соединенные программоноситель, оптически связанный с фотоголовкой считывания, и элемент сравнения, а также блок коррекции, пepвы входом соединенный с задатчиком параметра, и последовательно соединенные усилитель мощности и элемент сравнения, введены первый и второй операционные усилители, три ключевых элемента, два накопительных конденсатора и усилительповторитель, .выходом соединенный с входом, усилителя мрщности, а входом через первый ключевой элемент и операционный усилитель - с выходом второго ключевого элемента, вход которого подключен к выходу блока сравнения, инвертирующий вход операционного усилителя соединен с входом третьего ключевого элемента и с первым накопительным конденсатором, не инвертирующий вход второго операционного усилителя подключен к выходу первого операционного усилителя, а инвертирующий вход заземлен. Кроме того,блок коррекции содержит последовательно соединенные дат чик действительного параметра, элемент сравнения; пороговый элемент, фазосдвигающий блок, генератор коро ких импульсов и генератор импульсов управления, выходы которого подключ ны к первым выходам блока, вход дат чика действительного параметра соед нен с вторым входом блока, второй вход элемента сравнения подключен к первому входу блока, а выход - к второму выходу блока. На чертеже представлена блок-схе ма предлагаемого устройства. Устройство для программного упра ления содержит программоноситель 1, где в качестве носителя программы используется д:ц1аграммная лента с на несенной на нее программой (на чертеже не показана, фотоэлектрическо следящее устройство 2 считывания программы, оптически связанное с узлом программоносителя 1, фотоследящую головку 3, блок сравнения 4, операционный усилитель 5, усилитель повторитель 6, усилитель мощности 7, а также исполнительный двигатель 8 и задатчик 9 программируемого па }аметра, кинематически связанные с механизмом перемещения 10, выход которого подключен к входу фотоследящей головки 3, причем вход операционного усилителя 5 подключен к выходу схеглы сравнения 4 через ключевой элемент 11, а вход усилителяповторителя 6 подключен к выходу операционного усилителя 5 через ключевой элемент 12. К инвертирующе му, входу операционного усилителя 5 подключен накопительный конденсатор 13 и через ключевой элемент 14 операционный усилитель 15, неинвертирующий вход которого соединен с выходом операционного усилителя 5. К входу усилителя-повторителя 6 под ключен также накопительный конденсатор 16. I Устройство содержит также узел коррекции 17, выполненный в виде последовательно соединенных датчика 18 действительного значения программируемого параметра, схемы сравнения 19, порогового элемента 20, фазосдвигающего блока 21, генератор коротких импульсов 22 и генератора 23 импульсов управления. Выход гене ратора 23 импульсов управления подключен к ключевым элементам 11,12 и 14, а выход элемента сравнения 19 подключен также к ключевому элементу 12. Устройство работает следующим образом. Узел программоносителя 1 по сигналу узла автоматического поиска программ (на чертеже не показан) начинает ускоренную перемотку комплекта программ, в нужном направлении до тех пор, пока начало заданной программы не займет исходного положения. При этом автоматически включается фотоэлектрическая следящая система 2 считывания программа. При перемещении программы фотоследящая головка 3 отслеживает границу програкачы. Перемещение программы вызывает-изменение дифференциального сопротивления фотоследящей головки 3, которое сравнивается в мостовом блоке сравнения 4 с эталонньал. Сигнал разбаланса мостового блока сравнения 4 через ключевой элемент 11 поступает на неинвёртирукядий вход операционного усилителя 5. После усиления сигнал разбаланса через ключевой элемент 12 и усилитель-повторитель 6 поступает на вход усилителя мощности 7, где усиливается до требуемой мощности и приводит во вращение исполнительный двигатель 8, который вращается в нужном направлении до тех пор, пока механизм перемещения 10 фотоследящей головки не переместит фотоследящую головку 3 ,в попоже-. ние, при котором ее дифференциальное сопротивление будет равно эталонному в мостовом блоке сравнения 4. Одновременно исполнительный двигатель В изменяет и положение задатчика 9 программируемого параметра, величина отклонения которого пропорциональна величине, а направление отклонения фазе программируемого параметра. Сигнал с задатчика 9 программируемого параметра - поступает на вход устрюйства, параметр которого подлежит програ -а«1ированию (на чертеже не показано) , и- на вход сравнения 19. Для коррекции программы и дрейфовых параметров операционного усилителя 5, обусловленных изменением внешних условий эксплуатации nporparSF мцого устройства (температуры, влажности, напряжения питания сети и др.), используется метод циклической коррекции, основанный на периодическом запоминаний сигналов дрейфа нуля и последующей их компенсации. Действительное значение программируемого параметра измеряется датчиком 18 действительного значения параметра и сравнивается в элементе сравнения 19 с величиной программного значения, поступившей от задатчика 9. Если разность этих величин больше величины допустимой погрешности, то это вызывает срабатывание порогового элемента 20, верхний и нижний пороги срабатывания которого определяют допустикые положительную и отрицател ьую погрешности между действительным и программным значениями параметра. Срабатывание порогового элемента 20 вызывает срабатывание фазосдвигающего блока 21, затем генератора 22 коротких импульсов и генератора 23 импульсов управления, которыЛ управляет работой ключевых элементов 11, 12 и 14, переводя их в нижнее положение (на чертеже ключи находятся в верхнем положении), При этом происходит следующее. При переключении ключевых элементов 11,12 и 14 в нижнее положение неинвертирующий вход усилителя 5 заземляется и на его входе устанавливается потенциал, равный нулю. На выходе усилителя 5 устанавливается потенциал дрейфа, который усиливается усилителем 15 и через замкнуть ключевой элемент 14 поступает на конденсатор 13 до тех пор, пока на выходе усилителя 5 не установится нулевой потенциал.Таким образом, корректирующий сигнал, устанавливающий нулевое смещение усилителя 5, запоминается конденсатором 13. Одновременно с коррекцией де1ейфовых параметров операционного усилителя 5 происходит коррекция программы. Сигнал, равный погрешности программы, поступает от элемента сравнения 19 через ключевой элемент 12, который находится в нижнем положении, на вход усилителя-повгорителя 6, где сравнивается с величиной предыдущего значения выходного сигнала с усилителя 5, запомненного крн денсатором 16. Суммарный сигнал через усилитель-повторитель 6 поступает на вход усилителя мощности 7, а затем на исполнительный двигатель 8, который изменяет положение задатчика 9 программируемого параметра, тем самым внося коррекцию в программное значение параметра в устройстве, параметр которого подлежитпрограммированию. этом приводится в действие механизм перемещения 10, (Который изменяет положение фотоследящей головки 3 на величину, равную коррекции программы. Процесс устранения дрейфа нуля и коррекции программы определяется длительностью импульса управления. После окончания действия импульса управления ключевые элементы 11,12 и 14 занимают верхнее положение, и фотоэлектрическое следящее устройство 2 переходит в режим слежения. В случае неполного устранения погрешности программируемого параметра процесс коррекции повторяется до тек пор, пока сигнал с элемента сравнения 19 не будет приводить к срабатыванию порогового элемента 20. Таким образом, выполнение узла коррекцииг. .электронным с соответству- ющими изменениями схемл фотоэлектрического следящего устройства позволяет проводить непрерывную корректировку программируемого параметра, что повышает точность отработки программы. В результате при использовании предлагаемого устройства для обеспечения оптимального напряженного состояния ПЭТФ пленки повышается качество изготовляелмх фотоматериалов и магнитных лент, основой которых является ПЭТФ пленка.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРОГРАММНЫЙ РЕГУЛЯТОР8Cгco:osн.^я!iATuH;ii04LKiir;tCK^БИБЛИОТЕКА | 0 |
|
SU315162A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 226702, КЛ.С05 В 19/12, 1967 (). | |||
