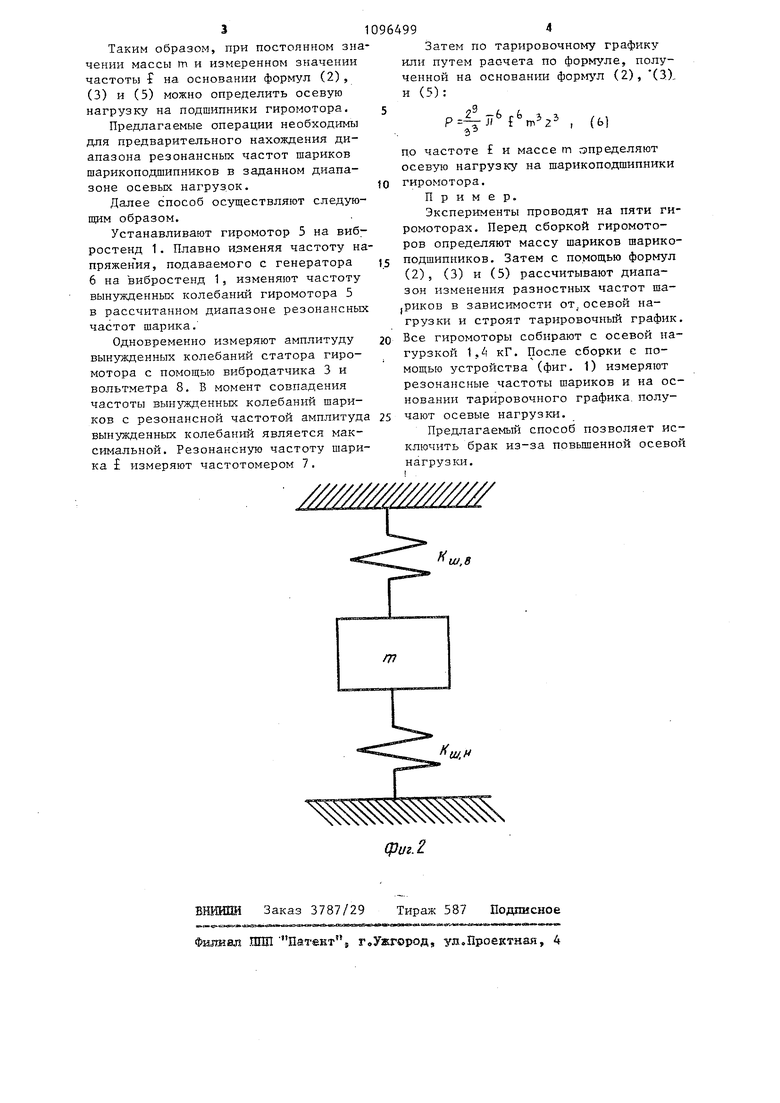
Изооретениге относится к приборостроению и может быть использовано для контроля гяромоторов Известен способ измерения жесткости подшипнирса} заключающийся в том, что создают вын жденные колеба ния подшипника, непрерывно изменяя частоту колебанш и по резонансной частоте колебаний системы судят о жесткости подшипника 1. Недостаток этого способа в том, что он не позволяет определить осевую нагрузку на -подшипники в собран ном гиромоторе. Наиболее близким к изобретению по технической сущности и достигаемому эффекту является способ контро ля осевой нагрузкз на шарикоподшипниковые опоры гиромотора, включающий создание вынужденных колебаний собранного гиромотораэ непрерывное изм нение и измерение частот этих колебаний л расчет по найденным значени ям осевой нагрузки Г2 . Однако недостаточная точность контроля известного способа требует точного учета большого количества масс и упрзгих соединений деталей и узлов прибора, а также построения сложной расчетной модели для определения осевой нагрузки, Цель изобретения - повышение точI О С Т И контроля. Поставленная цепь достигается теМ что согяаспо способу контроля осевой кагруздш на шарикоподшипниковые опоры гтфомотора, включающему создание вынужденных колебаний собранного гиромотора, непрерывное изменение и измерение частот этих колебаний и расчет осевой нагрузки, предва рительно измеряют массу шариков шарикоподшипников и при изменении часTOi- вын,ж eнньE колебаний определяют резонанснук частоту шариков шарикоподшипников по максимальной амплитуде вын1,01сденных колебаний, а расчет осевой нагр5 згш осуществляют по полу ченным данным. На фиг, 1 изображена схема устрой ства для осуществления способа; на фиг. 2 - расчетная модель. Устройство содержит малогабаритный вибростенд 1 типа П-Ж-, на подвижной части 2 которого с вибродатчиком 3- установлено приспособление 4 для крештения гиромотора 5, К входу вибростенда 1 подключены генератор 6 типа ЗГ-10 и частотомер 7 типа 43-33 5 а к выходу вибродатчикз 3 ламповый вольтметр 8 типа ВЗ-ЗА, Способ осуществляют следующим образом. Перед Сборкой гиромотора определяют массу шарика шарикоподшипника либо путем взвешивания, либо измерив диаметр шарика, с последующим расчетом по формуле f iгде V - объем шарика, Р - плотность материала шарика, d - диаметр шарика. Затем предварительно экспериментально рассчитывают жесткость шарикоподшипника К по форьгуле К I где С постоянная для каждого шарикоподшипника величина, определяемая по формулам Герца, осевая нагрузка на подшипник. Формула (2) устанавливает однозначную взаимосвязь жесткости К и осевой нагрузки Р. Зная жесткость К подшипника, рассчитьшают жесткость соединения каждого шарика с кольцами, К Кщ. 2 где Z - количество шариков. Учитывая, что масса m шарика значительно меньше всех других упруго соединенных масс гиромотора, представляют расчетисто модель (фиг, 2), где Кщд и Кц, соответственно жесткость соединения шарика с внутренним и наружнйг кольцашт подшипника К,„.+ К, ш.а Ш.Н. Эта модель представляет собой одномассовую колебательнзто систему, резонансная частота которой определяется по формуле (5) показьшает связь между резонансной частотой шарика, массой m и жесткостью Кщ, Если жесткость увеличивается с увеличением осевой нагрузки Р, то увеличивается и резонансная частота f . 3 Таким образом, при постоянном зн чении массы m и измеренном значении частоты на основании формул (2), (3) и (5) можно определить осевую нагрузку на подшипники гиромотора. Предлагаемые операции необходимы для предварительного нахождения диапазона резонансных частот шариков шарикоподшипников в заданном диапазоне осевых нагрузок. Далее способ осуществляют следую щим образом. Устанавливают гиромотор 5 на виб ростенд 1. Плавно изменяя частоту н пряжения, подаваемого с генератора 6 на вибростенд 1, изменяют частоту вынужденных колебаний гиромотора 5 в рассчитанном диапазоне резонансны частот шарика. Одновременно измеряют амплитуду вынужденных колебаний статора гиромотора с помощью вибродатчика 3 и вольтметра 8. В момент совпадения частоты вынзжденных колебаний шариков с резонансной частотой амплитуд вынужденных колебаний является максимальной. Резонансную частоту шари ка f измеряют частотомером 7. 994 Затем по тарировочному графику или путем расчета по формуле, полученной на основании (2), (3) и (5): п 2 -brk т, 3, Р -1Г л f п 2 Ъ по частоте и массе m гэпределяют осевую нагрузку на шарикоподшипники гиромотора. Пример. Эксперименты проводят на пяти гиромоторах. Перед сборкой гиромоторов определяют массу шариков шарикоподшипников. Затем с помощью формул (2), (3) и (5) рассчитывают диапазон изменения разностных частот шариков в зависимости от.осевой нагрузки и строят тарировочный график. Все гиромоторы собирают с осевой нагурзкой , кГ. После сборки с помощью устройства (фиг. 1) измеряют резонансные частоты шариков и на основании тарировочного графика, получают осевые нагрузки. Предлагаемый способ позволяет исключить брак из-за повьщ1енной осевой нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения резонансных частот гиромотора | 1982 |
|
SU1073579A1 |
| Способ контроля шарикоподшипников | 1985 |
|
SU1247708A1 |
| Способ контроля пьезоэлемента | 1988 |
|
SU1654729A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОСЕВОЙ ЖЕСТКОСТИ | 1970 |
|
SU267146A1 |
| Способ измерения жесткости подшипника и устройство для его осуществления | 1991 |
|
SU1776347A3 |
| Способ контроля неравножесткости шарикоподшипников | 1987 |
|
SU1439440A1 |
| Способ контроля шарикоподшипниковых узлов | 1987 |
|
SU1439436A1 |
| Способ определения натяга колец шарикоподшипников | 1982 |
|
SU1049758A2 |
| Способ определения дефектов шарикоподшипниковых опор ротора | 1988 |
|
SU1597661A1 |
| Способ сборки разборного гиромотора | 1982 |
|
SU1084607A1 |
СПОСОБ КОНТРОЛЯ ОСЕВОЙ НАГРУЗКИ НА ШАРИКОПОДП1ИЦШ1КОВЫЕ ОПОРЫ ГИРОМОТОРА, включающий создание вынужденных колебаний собранного гиромотора,непрерывное изменение и измерение частот этих колебаний и расчет осевор нагрузки, отличающийся тем, что, с целью повьшения точности контроля, предварительно измеряют массу шариков шарикоподшипников и при изменении частот вынужденных колебаний определяют резонансную частоту шариков шарикоподшипников по максимальной амплитуде вынужденных колебаний, а расчет осевой нагрузки осуществляют по по лученным данным.Q СО 05 
К
ш,8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Жолдак С,А | |||
| Технология изготовления малогабаритных гиромоторов | |||
| Л., Судпромгиз, 1961, с | |||
| Соломорезка | 1918 |
|
SU157A1 |
