4
со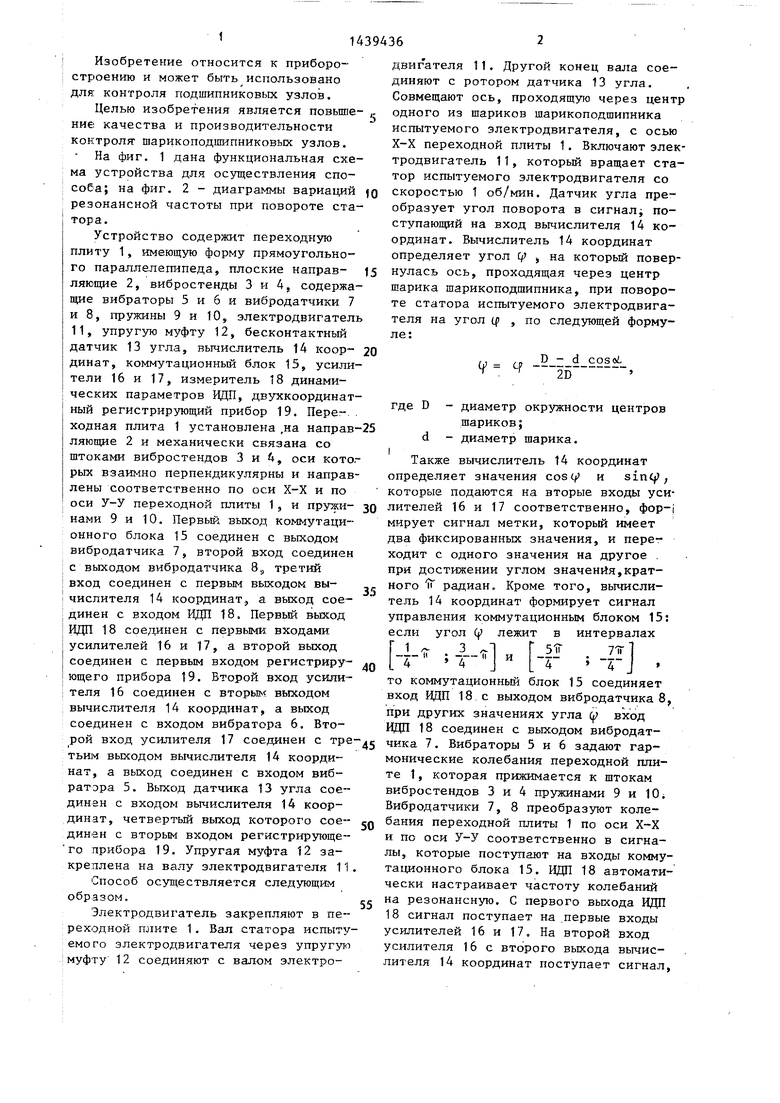
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля шарикоподшипников электродвигателя | 1987 |
|
SU1434307A1 |
| Способ контроля шарикоподшипников в электродвигателе | 1987 |
|
SU1448231A1 |
| Способ контроля шарикоподшипников | 1985 |
|
SU1247708A1 |
| Способ контроля неравножесткости шарикоподшипников | 1987 |
|
SU1439440A1 |
| Способ определения дефектов шарикоподшипниковых опор ротора | 1988 |
|
SU1597661A1 |
| Способ контроля осевой нагрузки на шарикоподшипниковые опоры гиромотора | 1982 |
|
SU1096499A1 |
| Устройство для испытания объектов на резонансных частотах | 1985 |
|
SU1364901A1 |
| Испытательный вибростенд | 1974 |
|
SU945704A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОСЕВОЙ ЖЕСТКОСТИ | 1970 |
|
SU263244A1 |
| УСТРОЙСТВО КОНТРОЛЯ ДОПОЛНИТЕЛЬНОЙ НЕЛИНЕЙНОСТИ МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ ЛИНЕЙНОГО УСКОРЕНИЯ ПРИ ИСПЫТАНИИ НА ВИБРОУСТОЙЧИВОСТЬ | 2014 |
|
RU2586262C2 |
Изобретение относится к приборостроению, и может быть использовано для контроля подшипниковых узлов. Цель - повьшение качества и производительности контроля шарикоподшипниковых узлов. Задают радиальную вибрацию, направление которой непрерьшно совмещают с центром одного из шариков шарикоподшипника. Непрерывно измеряют резонансную частоту. Регистрируют ее зависимость от угла поворота статора, и по вариации резонансной частоты судят о дефектах шарикоподшипникового узла. При этом регистрирующий прибор строит зависимость резонансной частоты от угла поворота статора испытуемого узла. 2 ил. с 
й
I Изобретение относится к приборе- строению и может быть использовано для: контроля подшипниковых узлов.
Целью изобретения является поБЬШ1е- ни€1 качества и производительности контроля шарикоподшипниковых узлов.
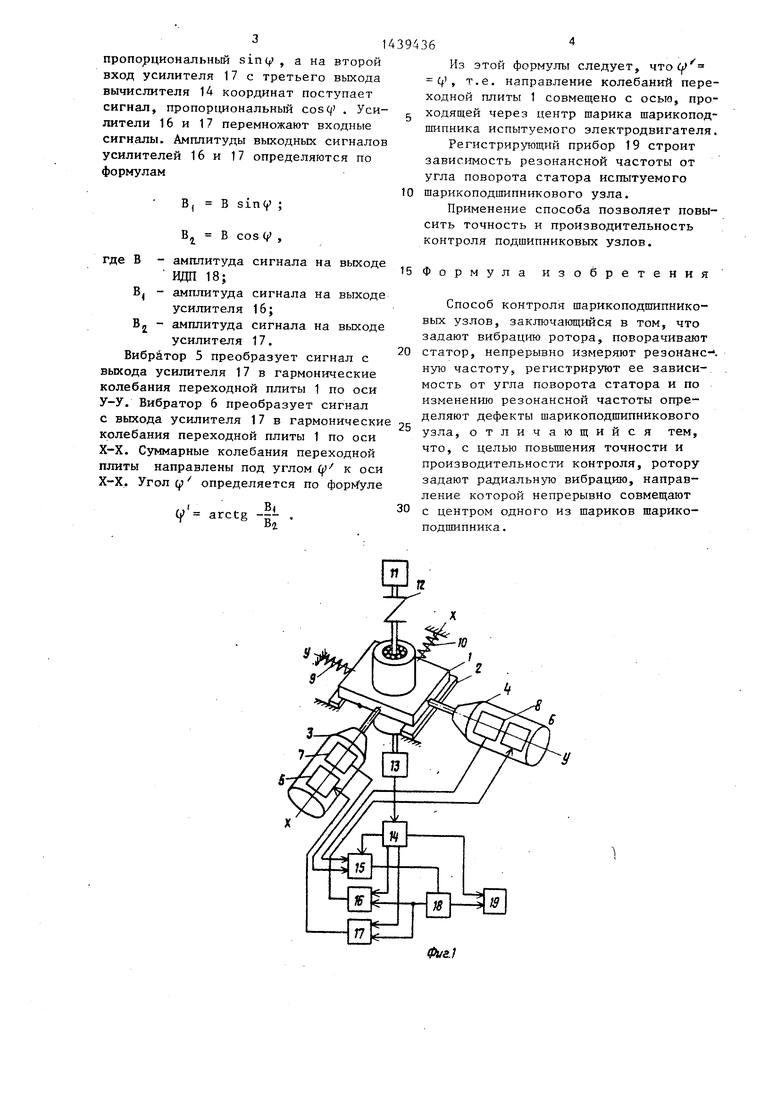
На фиг. 1 дана функциональная схема устройства для осуществления спо- : соба; на фиг. 2 - диаграммы вариаций
резонансной частоты при повороте ста- 1 тора.
Устройство содержит переходную плиту 1, имеющую форму прямоугольного параллелепипеда, плоские направ- ляющие 2, вибростенды 3 и 4, содержащие вибраторы 5 и 6 и вибродатчики 7 и 8, пружины 9 и 10, электродвигатель 11, упругую муфту 12, бесконтактный датчик 13 угла, вычислитель 14 коор- 1 динат, коммутационный блок 15, усилители 16 и 17, измеритель 18 динамических параметров ИДП, двухкоординат- I ный регистрирующий прибор 19. Пере-. , ходная плита 1 установлена ,на направляющие 2 и механически связана со штоками вибростендов 3 и 4, оси кото,- рых взаимно перпендикулярны и направлены соответственно по оси Х-Х и по I оси У-У переходной плиты 1, и пружи- нами 9 и Ю. Первый выход коммутационного блока 15 соединен с выходом вибродатчика 7, второй вход соединен с выходом Бибродатчика 8, третий I вход соединен с первым выходом вы- числителя 14 координат, а выход сое- iдинен с входом ИДП 18, Первый выход ИДП 18 соединен с первыми входами I усилителей 16 и 17, а второй выход I соединен с первым входом регистриру- I ющего прибора 19. Второй вход усили- I теля 16 соединен с вторым выходом вычислителя 14 координат, а выход соединен с входом вибратора 6. Второй вход усилителя 17 соединен с тре тьим выходом вычислителя 14 координат, а выход соединен с входом вибратора 5. Выход датчика 13 угла соединен с входом вычислителя 14 координат, четвертый выход которого сое-- динен с вторым входом регистрирзпоще- го прибора 19. Упругая муфта t2 закреплена на валу электродвигателя 11
Способ осуЕ(ествляется следующим образом.
Электродвигатель закрепляют в переходной плите 1. Вал статора испытуемо го электродвигателя через упругует :муфту 12 соединяют с валом электродвиг ателя 11. Другой конец вала соединяют с ротором датчика 13 угла. Совмещают ось, проходящую через центр одного из шариков шарикоподшипника испытуемого электродвигателя, с осью Х-Х переходной плиты 1. Включают электродвигатель 11, который вращает статор испытуемого электродвигателя со скоростью 1 об/мин. Датчик угла преобразует угол поворота в сигнал поступающий на вход вычислителя 14 координат. Вычислитель 14 координат определяет угол с/ , на который повернулась ось, проходящая через центр щарика шарикоподшипника, при повороте статора испытуемого электродвигателя на угол tf , по следующей формуле:
V
2D
где D - диаметр окружности центров
шариков; d - диаметр шарика.
Также вычислитель 14 координат определяет значения cos if и sinif которые подаются на вторые входы усилителей 16 и 17 соответственно, формирует сигнал метки, который имеет два фиксированных значения, и переходит с одного значения на другое . при достижении углом значения,кратного и радиан. Кроме того, вычислитель 14 координат формирует сигнал управления коммутационным блоком 15: если угол if лежит в интервалах Г 1 - 3 1 Г 51Г 71Г -Г « -4-J . то коммутационный блок 15 соединяет вход ИДП 18 с выходом вибродатчика 8, при других значениях угла вход ИДП 18 соединен с выходом вибродатчика 7. Вибраторы 5 и 6 задают гармонические колебания переходной шш- те 1, которая прижимается к штокам вибростендов 3 и 4 пружинами 9 и 10; Вибродатчики 7, 8 преобразуют колебания переходной плиты 1 по оси Х-Х и по оси У-У соответственно в сигналы, которые поступают на входы коммутационного блока 15. ИДП 18 автоматически настраивает частоту колебаний на резонансную. С первого выхода ИДП 18 сигнал поступает на .первые входы усилителей 16 и 17. На второй вход усилителя 16 с второго выхода вычислителя 14 координат поступает сигнал
314
пропорциональный , а на второй вход усилителя 17 с третьего выхода вычислителя 14 координат поступает сигнал, пропорциональный cos(/ . Усилители 16 и 17 перемножают входные сигналы. Амплитуды выходных сигналов усилителей 16 и 17 определяются по формулам
В, В siny ;
В, В cosV ,
где В В Вп
амплитуда сигнала на выходе
ИДП 18;
амплитуда сигнала на выходе
усилителя 16;
амплитуда сигнала на выходе
усилителя 17.
Вибратор 5 преобразует сигнал с выхода усилителя 17 в гармонические колебания переходной плиты 1 по оси У-У. Вибратор 6 преобразует сигнал с выхода усилителя 17 в гармонические колебания переходной плиты 1 по оси Х-Х. Суммарные колебания переходной плиты направлены под углом ( к оси Х-Х. Угол (f определяется по
6
Из этой формулы следует, что( Cf , т.е. направление колебаний переходной плиты 1 совмещено с осью, про- ходящей через центр шарика шарикоподшипника испытуемого электродвигателя.
Регистрирующий прибор 19 строит зависимость резонансной частоты от угла поворота статора испытуемого шарикоподшипникового узла.
Применение способа позволяет повысить точность и производительность контроля подшипниковых узлов.
Формула изобретения
Способ контроля шарикоподшипниковых узлов, заключающийся в том, что задают вибрацию ротора, поворачивают
статор, непрерывно измеряют резонанс-. ную частоту, регистрируют ее зависимость от угла поворота статора и по изменению резонансной частоты определяют дефекты шарикоподшипникового узла, отличающийся тем, что, с целью повьш1ения точности и производительности контроля, ротору задают радиальную вибрацию, направление которой непрерывно совмещают
с центром одного из шариков шарикоподшипника.
0I/&J
Метка
Фиг. 2
| Способ определения перекоса внутрен-НЕгО КОльцА пОдшипНиКА КАчЕНия | 1979 |
|
SU823944A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
