Изобретение относится к области подшипниковой промышленности и может быть использовано для контроля нерав- ножесткости шарикоподшипникового узла.
Цель изобретения - повышение точности и производительности контроля нераножесткости шарикоподшипников собранного шарикоподшипникового узла.
На чертеже изображена функциональная схема устройства, реализукяцего способ контроля неравнржесткости шарикоподшипников собранного шарикоподшипникового узла.
Устройство содержит сомонтирован- на основании 1 малогабаритную поворотную установку (ШУ) 2, на которой жестко закреплен вибростенд 3. На вибростенде 3 с помощью оправки установлен испытуемый шарикоподшипни- ковьш узел Д. Бибростенд 3 связан с измерителем 5 динамичесгаях параметров (ИДИ) гибкой связью. Информадрюн- 1ЩЙ выход ИДП 5 соединен с само1шс- цем 6. Датчик 7 метки поворота стола Miy .2 через ВДП 5 подключен к само- гисцу 6«
Устройство работает следующим об разом.
Диагностируеньш шарикоподшипниковый узел 4 с помощью оправки устанавливают на вибростенд 3s которьй смон тирован на столе поворотной установ- ки 2 так, чтобы на шарикоподшипники действовала осевая вибрация, создаваемая вибростендом. МПУ поворачивает вибросте1Щ 3 в вертикальной плоскости вокруг оси, перпендикулярной направлетпо вибрации с оптимальной угловой скоростью со 1 об/мин. ИДП 5 осуществляет автоматическую подстрой ку частоты вибратора В вибростенда 3 на резонансную частоту испытуемого
5 и также поступает на само.писец 6, который строит зависимость вариации резонансной частоты относительно частоты поворота вибростенда 3.
При неравной осевой жесткости шарикоподшипникового узла кривая, ха- рактеризукщая зависимость осевой жесткости от перемещения, деформиру- 10 ется. При воздействии на узел гармонически изменяющейся силы тяжести ротора на выходе регистрируемая вариация резонансной частоты содержит сравнимые по амплитуде первую и вторую гармоники.
15
Таким образом, анализируя отношение первой и второй гармоник вариации резонансной частоты относительно час20 тоты поворота вибростенда, можно судить о величине относительной нерав- ножесткости собранного шарикоподшипникового узла.
Предлагаемый способ резко повьш1ает
25 точность контроля и его производительность за счет оценки относительной неравножесткости шарикоподшипникового узла по вариации резонансной частоты относительно частоты поворо30 та вибростегща вокруг оси, перпендикулярной направлению вибрации.
Контроль шарикоподшипникового узла можно осуществлять на рабочих оборотах.
35
Формула изобретения
Способ контроля неранножесткости шарикоподшипников шарикоподшипни)40
кового узла, заключающийся в том, что измеряют осевую резонансную частоту узла, о тличающийся тем, что, с целью повьшгения точности контроля, измеряют вариацию резонанс- шарикоподшип гакового узла 4 С вибро- ой частоты при вращении оси шарико- датчика ВД впбростевда 3 ИДП 5 сни- подшипникового узла в вертикальной мает сигнале характеризуюпцн вари,ацию резонансной частоты &, который через информационный выход поступает на самописец 6. Сигнал с 7 метки поворота стола МПУ усиливается в 1Щ1
50
плоскости и по отношению амплитуд первой и второй гармонической состав- .пяющей вариации определяют величину относительной неравномерности шарикоподшипников .
39А402
5 и также поступает на само.писец 6, который строит зависимость вариации резонансной частоты относительно частоты поворота вибростенда 3.
При неравной осевой жесткости шарикоподшипникового узла кривая, ха- рактеризукщая зависимость осевой жесткости от перемещения, деформиру- 10 ется. При воздействии на узел гармонически изменяющейся силы тяжести ротора на выходе регистрируемая вариация резонансной частоты содержит сравнимые по амплитуде первую и вторую гармоники.
15
Таким образом, анализируя отношение первой и второй гармоник вариации резонансной частоты относительно час20 тоты поворота вибростенда, можно судить о величине относительной нерав- ножесткости собранного шарикоподшипникового узла.
Предлагаемый способ резко повьш1ает
25 точность контроля и его производительность за счет оценки относительной неравножесткости шарикоподшипникового узла по вариации резонансной частоты относительно частоты поворо30 та вибростегща вокруг оси, перпендикулярной направлению вибрации.
Контроль шарикоподшипникового узла можно осуществлять на рабочих оборотах.
35
Формула изобретения
Способ контроля неранножесткости шарикоподшипников шарикоподшипни)кового узла, заключающийся в том, что измеряют осевую резонансную частоту узла, о тличающийся тем, что, с целью повьшгения точности контроля, измеряют вариацию резонанс- ой частоты при вращении оси шарико- подшипникового узла в вертикальной
плоскости и по отношению амплитуд первой и второй гармонической состав- .пяющей вариации определяют величину относительной неравномерности шарикоподшипников .
2
07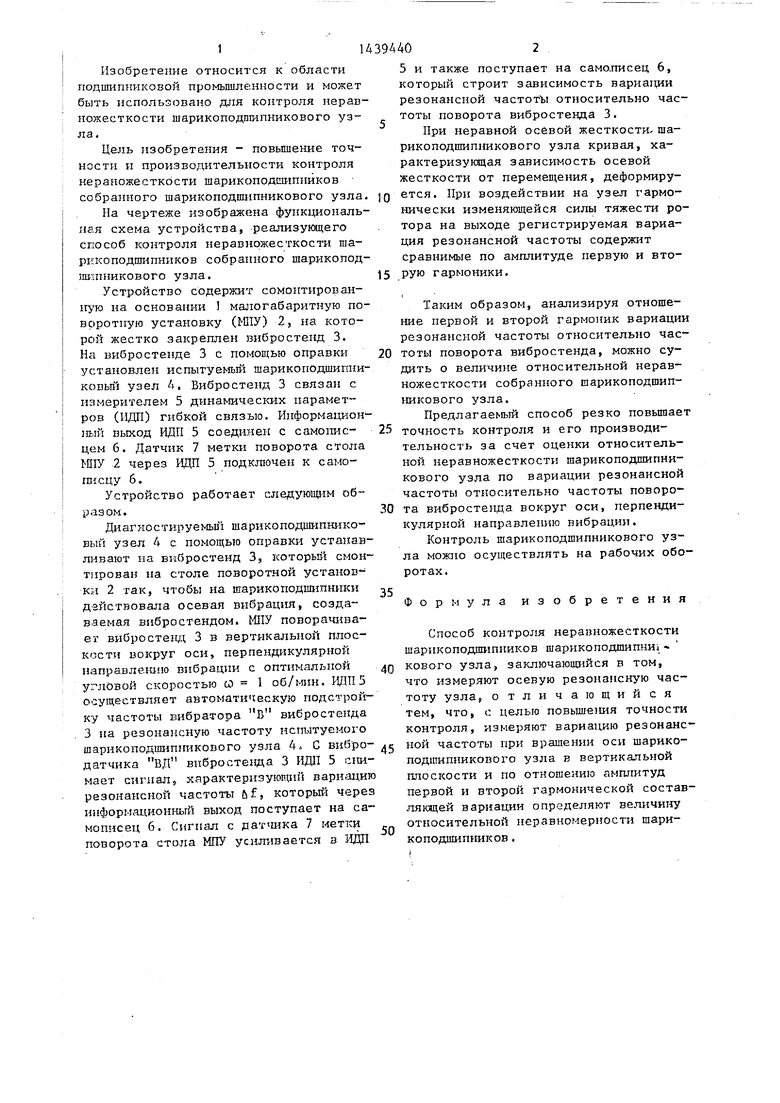
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля шарикоподшипниковых узлов | 1987 |
|
SU1439436A1 |
| Способ определения жесткостных характеристик шарикоподшипниковых опор ротора | 1980 |
|
SU911195A1 |
| Способ контроля шарикоподшипников электродвигателя | 1987 |
|
SU1434307A1 |
| Способ определения дефектов шарикоподшипниковых опор ротора | 1988 |
|
SU1597661A1 |
| Способ контроля шарикоподшипников в электродвигателе | 1987 |
|
SU1448231A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТОВ ОТНОСИТЕЛЬНО ОСИ ПОДВЕСА ДВУХСТУПЕННОГО ГИРОСКОПА С ШАРИКОПОДШИПНИКОВЫМ ПОДВЕСОМ | 1967 |
|
SU1840626A1 |
| Способ контроля осевой нагрузки на шарикоподшипниковые опоры гиромотора | 1982 |
|
SU1096499A1 |
| Электромагнитный вибровозбудитель колебаний | 1985 |
|
SU1335324A1 |
| СНОСОВ ОПРЕДЕЛЕНИЯ ОСЕВОЙ НЕРАВНОЖЕСТКОСТИ ШАРИКОПОДШИПНИКОВЫХ ОПОР ГИРОМОТОРА | 1970 |
|
SU287326A1 |
| Способ уменьшения вибрационных погрешностей гироплатформы на динамически настраиваемых гироскопах | 2020 |
|
RU2750180C1 |
Изобретение относится к подшипниковой промышленности и может быть использовано для контроля неравно- жесткости шарикоподгаипникового узла. Цель - повьшение точности контроля шарикоподшипников собранного шарикоподшипникового узла. Непрерывно измеряют амплитуды первой и второй гармонических составляющих вариаций осевой резонансной частоты подшипникового узла. Измерение проводят при вращении оси узла в вертикальной плоскости. Неравножесткость определяют по соотношению амплитуд. 1 ил.
Метка
Af
f f
.6
дд:
f
/K///////// ///
| Способ определения натяга колец шарикоподшипников | 1982 |
|
SU1049758A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
