0: а
Изобретение относится к цифровым системам регулирования и настройки цифровых следящих систем.
Известно устройство для регулировки и проверки цифровых следящих 5 систем, содержащие задающее устройство, включающее в себя электромеханический синусный механизм, цифровой датчик угла и блок формирования сигнала постоянной скорости, сумма- тор, преобразователь код - напряжение и привод, в состав которого входит преобразователь вал - код ij.
Недостаткам указанного устройства является неудобство в зксплуата- 5 ции из-за использования электромеханических устройств и высокая стоимость за счет применения дорогостоящих многоразрядных датчиков угла, необходимых при проверке высокоточ- 20 ных систем. Кроме того, с помощью такого устройства нельзя осуществить проверку и настройку цифровых следящих систем комбинированного регулирования, так как отсутствует воз- 5 можность выработки компенсирую1цих сигналов в цифровой форме.
Цель изобретения - {Расширение функ1Д{ональных возможностей устрой- .. ства.,30
Цель достигается тем, что в устрой- ство, содержащее последовательно соединенные задающее устройство, первьй сумматор, преобразователь код напряжение и привод, выход которого jj соединен с вторым входом первого сумматора, введено второй и третий сумма, торы, шесть масштабирующих устройств, второй и третий преобразователи код напряжение, .выходы которых соединены с входами привода, а входы - соответственно с выходами второго и третьего сумматоров, первые входы которых соединены соответственно через первое и второе масштабирукшц1е устройства с 45 вторым выходом задающего устройства, вторые входы соответственно через третий и четвертый масштабируюпще устройства соединены с первым выходом задающего устройства и первым . 0 входом первого сумматора, третьи входы соответственно через пятое и шестое масштабирующие устройства соединены с третьим выходом задающего устройства.„
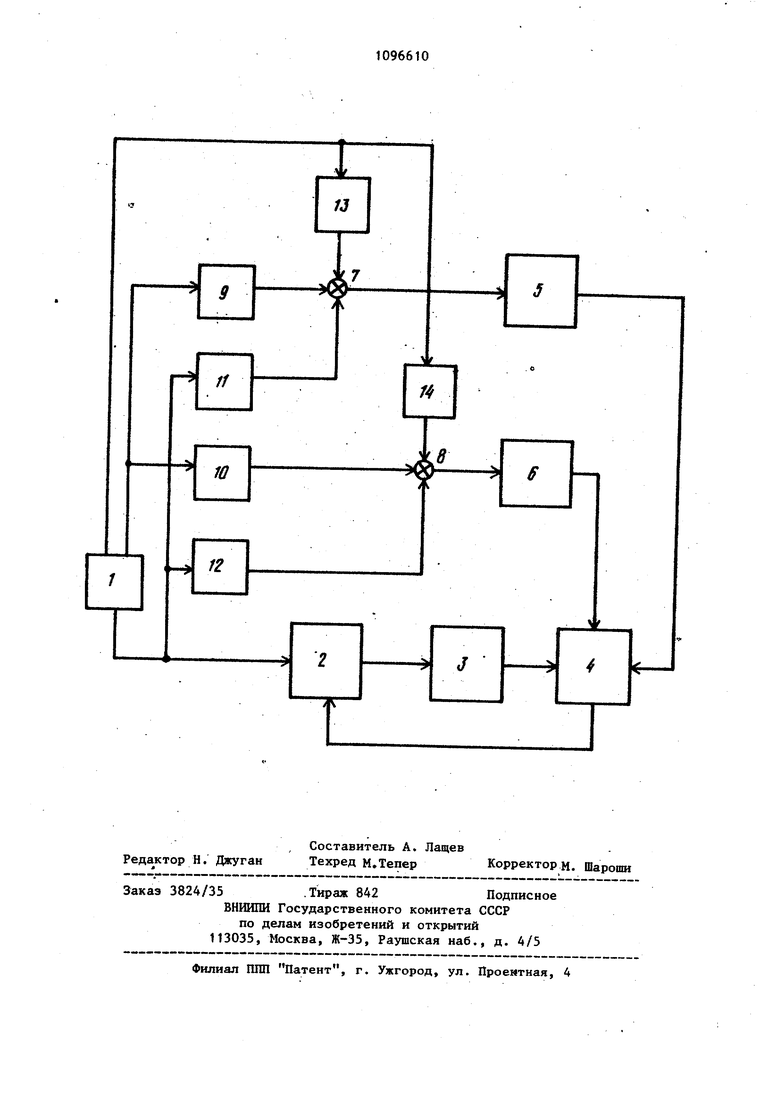
На чертеже изображена структурная схема предлагаемого устройства.
Устройство для проверки и настройки цифровых следящих систем содержит .-последовательно соединенные задающее устройство 1, сумматор 2, преобразователь 3 кода в напряжение, привод 4, выход которого соединен с вторым входом сумматора 2, а второй и третий Входы соединены соответственно с выходами второго 5 и третьего 6 преобразователей код - напряжение, входы которых соединены соответственно с выходами второго 7 и третьего. 8 сумматоров, первые входы которых соединены соответственно через первое 9 и второе 10 масштабирующие устройства с вторым выходом задающего устройства 1, вторые входы соо.тватственно через третье 11 и четвертое 12 машстабирукмцие устройства .соединены с первым выходом задающего устройства 1 и входом первого сумматора 2, третьи входы соответственно через -пятое 13 и шестое 14 масштабирующие устройства соединены с третретьим выходом задающего устройства 1.
Устройство работает следующим образом.
Задающее устройство 1 вьфабатывает в цифровом виде гармонические .сигналы, изменяющиеся по синусоидаль ному и косинусоидальному законам. Для цифровых систем, работаю.1Ц1х по отклонению, используется гармонический сигнал, изменяющийся по синусои-. лальному закону, который подается на вход сумматора 2, где он сравнивается с сигналом обратной связи привода 4. Сигнал рассогласования, получающийся в сумматоре 2, через преобразователь 3 кода в напряжение подается на управление приводом 4.
При проверке и настройке цифровых систем комбинированного регулирования в устройстве имитируется вычисление сигналов, пропорциональных 1-й и 2-й производным от задающего воздействия, причем сигналы могут вырабатываться с любым наперед заданным уровнем погрешностей, соответствующих каким-то алгоритмом вычисления производных.
Первую производную задающего воздействия можно имитировать суммой синусоидального и косинусоидального сигналов с определенными амплитудами. Идеальная производная синусоидального сигнала А Sin{jt равна AcoCosot.Пpи вычислении производной в цифровой вычислительной машине появляется методическая погрешность, обусловленная дискретным характером представления информации. Эта погрешность проявляется в видедополнительного фазового сдвига вычисляемого сигнала первой производной относительно идеального, т.е. реальный сигнал имеет ви AcjCos (ut-tf) или (tjt-(f) J , где (j. Последнее выражение можно представить в виде (() а Sinwt + Ь Cosot, ( A, Ца2 + tg( (3) Таким образом, компенсирующий сигнал с заданной методической ошибкой, пропорциональный первой производной от задающего воздействия, получается сложением на сумматоре 7 синусоидалького и косинусоидального сигналов, вырабатываемых в задающем устройстве 1 и умноженных соответственно в масштабирующих устройствах 11 и 9 на коэффициенты, определяемые формулами (1).- (3). Известно, что по цифровым системам погрешность из-за квантования по уровню при вычислении производных можно представить белым шумом. В предлагаемом устройстве имитация этой погрешности получается за счет того, что с задающего устройства 1 используются младшие разряды кода синусоидального или косинусоидального сигналов и в масштабирующем устройстве 13 производится умножение на соответствующий коэффициент, определяющий максимальную амплитуду погрешности из-за квантования по уровню. Следует отметить, что нумерация разрядов на входе масштабирующего устройства 13 может абсолютно произвольной, т.е. младший разряд кода задающего устройства 1 может быть старшим разрядом масштабирующего устройства 13. Сформированный таким образом код шума поступает затем на сумматор 7, на выходе которого получается код, пропорциональный первой производной от задающего воздействия, аналогичный коду, вычисленному в цифровой вычислительной машине, т.е. сигнал производной, в котором присутствует как методическая ошибка, так и ошибки изза квантования по уровню. Затем код компенсирующего сигнала через преобразователь 5 код - напряжение подается в привод 4. Следует отметить, что изменением коэффициентов масштабирующих устройств 9, 11 и 13 можно и штировать вычисление производной с любым алгоритмом. Компенсирующий сигнал, пропорциональный второй производной от задаю- щего воздействия, получается аналогичным образом с помощью масштабирующих устройств 10, 12и 14, сумматора 8 и преобразователя 5 кода в напряжение. Коэффициенты масштабирующих . устройств 10 и 12 выбираются в соответствии с формулами Sin (ut+ii-Ц))с Sinut + d Cosut; Aj Чс tg(1t-v) |; 4 где A2Sin(a)t+ii-y)-A((jt - вторая производная от задающего воздействия; Aj At(j2 - максимальная амплитуда второй производной. Таким образом, введение в устройство перечисленных элементов позволяет обеспечить выработку компенсирующих сигналов по задающему воздействию, а следовательно, проводить проверку и настройку цифровых систем комбинированного регулирования без цифровой вычислительной машины, что позволяет значительно удешевить процесс проверки и настройки цифровых систем регулирования. ° сравнению с известным предла: ° 7 Р° °°. точно и полно имитировать алгоритмы управления системы, которые должны быть реализованы в ЦВМ и, следовательно, уже на стенде, а не на объекте выявить все особенности, связанные с формированием управляющих алгоритмов в цифровом виде. Применение изобретения позволяет значительно сократить время настройки и отладки цифровых следящих систем и,в целом, удешевить разработку последних. Технические преимущества изобретения по сравнению с известным уст ройством, гзаключязотся в том, что оно значительно дешевле и удобнее в эксплу атации. Кроме того, с помсщыо предлагаемого устройства можно имитировать юбой алгоритм выработки управляющих сигналов дЛя цифровой системы и, слеовательно, значительно более качестенно проводить отработку указанных истем без применения управляющий ЭВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель коэффициента гар-МОНиК | 1979 |
|
SU805195A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
| Устройство измерения перемещений | 1990 |
|
SU1779906A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| Самонастраивающаяся система автоматического цифрового управления ректификационной колонной | 1985 |
|
SU1316689A1 |
| Устройство измерения вебер-амперных характеристик электротехнических устройств | 2016 |
|
RU2627559C1 |
| Устройство для дискретного преобразования Фурье | 1984 |
|
SU1188751A1 |
УСТРОЙСТВО ДПЯ ИССЛЕДОВАНИЯ И НАСТРОЙКИ ЦИФРОВЬ05: СЛЕДЯЩИХ СИСТЕМ, содержащее последовательно соединен-, ные задающее устройство, первый сумматор, преобразователь код - напряжение и привод, выход которого соединен с вторым входом первого сумматора, отличающееся тем. что, с целью расширения функциональ-Гных возможностей устройства, введены второй и третий сумматоры, шесть масштабирующих устройств, второй и третий преобразователи код - напряжение, вькоды которых соединены с входами привода, а входы --соответственно с выходами второго и третьего сумматоров, первые входы которых соединены соответственно через первое и второе масштабирующие устройства с вторым выходом задающего устройства, вторые входы соответственно через третий и четвертый масштабирующие устройства соединены с первым выходом задаюS щего устройства и первым входом первого сумматора, третьи входы соответственно через пятое и шестое масштабирующие устройства соединены с третьим выходом задающего устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пульт для регулировки и проверки цифровых следящих систем | |||
| Информационный листок, № 74-1128, Ш1-13-03.74-1128/Е1241 | |||
| НИМИ (прототип) . | |||
