Изобретение относится к технике телевидения и может быть использовано для измерения координат подвижных объектов.
Цель изобретения - повышение точности измерения.
На фиг. 1 представлена электрическая структурная схема телевизионного измерителя координат; на фиг. 2 - формирователя сигнала ошибки; на фиг. 3 - блока вычисления коэффициентов экстраполяции; на фиг. 4 - экстраполятора.
Телевизионный измеритель координат (фиг. 1) содержит фотоэлектронный преобразователь (ФЭП) 1, видеоусилитель 2, аналого-цифровой преобразователь (АЦП) 3, синхрогенератор 4, формирователь 5 развертки, цифровой интегратор 6, канал 7 измерения Х, формирователь 8 импульсов записи, формирователь 9 импульса привязки, счетчик 10, клапан 11 измерения Y, идентичный каналу 7 измерения Х, которые содержат второй сумматор 12, регистр 13 сдвига, масштабирующий блок 14, блок 15 вычисления коэффициентов экстраполяции, экстраполятор 16, формирователь 17 сигнала ошибки и первый сумматор 18.
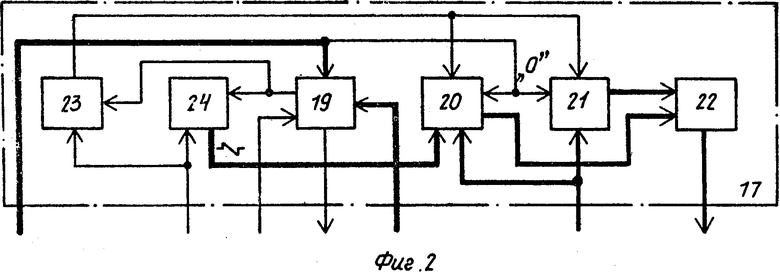
Формирователь 17 сигнала ошибки (фиг. 2) содержит формирователь 19 строба, цифровой дискриминатор 20, цифровой интегратор 21, блок 22 деления, элемент И 23, формирователь 24 опорного сигнала.
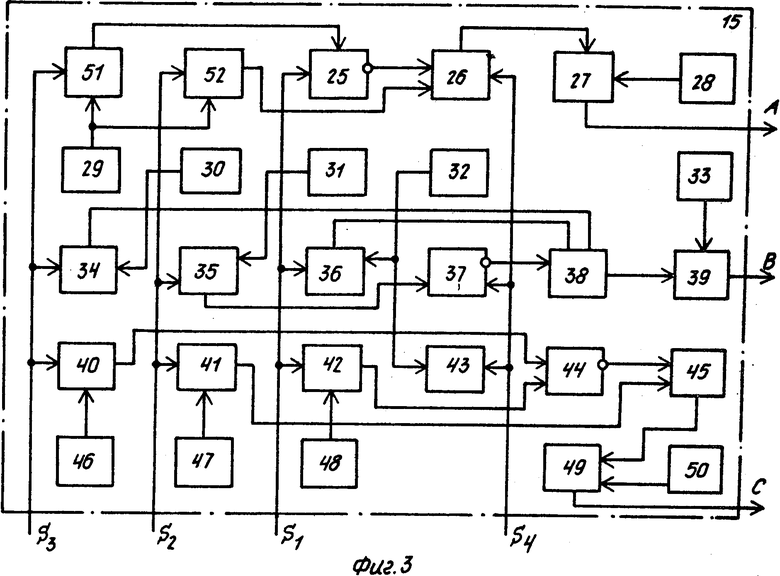
Блок 15 вычисления коэффициентов экстраполяции (фиг. 3) содержит сумматоры 25, 26, блок 27 деления, регистры 28-33 памяти кодов, умножители 34-36, сумматоры 37, 38, блок 39 деления, умножители 40-43, сумматоры 44, 45, регистры 46-48 памяти кодов, блок 49 деления, регистр 50 памяти кода, умножители 51, 52.
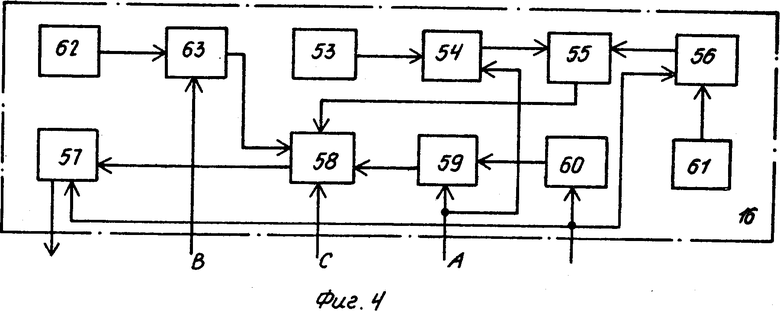
Экстраполятор (фиг. 4) содержит регистр 53 памяти кода, умножители 54, 55, сумматор 56, умножитель 57, сумматор 58, умножитель 59, квадратор 60, регистры 61, 62 памяти кода, умножитель 63.
Работает телевизионный измеритель координат следующим образом.
Траектория растрового сканирования задается выходными напряжениями формирователя 5, синхронизированного выходными сигналами синхрогенератора 4. Видеосигнал с выхода АЦП 3 поступает в формирователи 17 сигнала ошибки рассогласования между центром изображения объекта и электрическим центром следящего строба. Ошибки рассогласования qx, qy сформированные по результатам анализа положения видеосигнала изображения объекта относительно опорных сигналов временного строба, записываются в цифровые интеграторы 6. Синхронизация записи обеспечивается задним фронтом кадрового стробирующего импульса, поступающего на вход формирователя 8. Одновременно с ошибками рассогласований qx, qy в цифровые интеграторы 6 вносятся экстраполируемые приращения Δx, Δy с выхода масштабирующего блока 14, имеющего коэффициент передачи 1/Кп. Передний фронт импульса привязки на выходе формирователя 9, задержанный на один такт относительно входного сигнала, производит начальную нулевую установку счетчика 10, а задним фронтом импульса привязки обеспечивается запись в регистр 13 величины текущей координаты объекта Sэк.
Задача экстраполяции координат решается на основе четырехточечной аппроксимации траектории движения объекта, описываемой полиномом вида
Sэ = Аp3 + Вp2 + Сp + D, где р = М + nt;
М - базовый временной интервал,
nt - временной интервал экстраполяции.
Инвариантность экстраполируемого приращения координаты Δэ к значению кадровой частоты обеспечивается условием H = = Z, где Z = n x m - число элементов разложения в растре.
Коэффициенты полинома вычисляются в блоке 15 из следующих соотношений:
D = S1;
A =  (S4-3S3+3S2-D);
(S4-3S3+3S2-D);
B =  (-S4+4S3-5S2+2D);
(-S4+4S3-5S2+2D);
C =  (2S4+9S3-18S2-11D).
(2S4+9S3-18S2-11D).
Операция вычисления коэффициентов производится в начале очередного шага Н дискретизации. Временной интервал экстраполяции задается выходным кодом nt счетчика 10 (nt ≥ 0), на вход которого поступают тактовые импульсы (fти = FкадрZ) с третьего выхода синхрогенератора 4, а экстраполяционное приращение координат (Δх, Δy) обеспечивается экстраполяторами 16, реализующими следующий алгоритм экстраполяции:
Δx = nt[B(2M - 1) - 3AM(M - nt) + Ant2 + C] , который получено из условия
Δх = Sэ - S4
Таким образом, на выходе второго сумматора 12 имеем Sэ = S4 + Δ х. Погрешность экстраполяции в конце каждого шага Н отражается на амплитуде и знаке выходного сигнала формирователя 17, обеспечивающего отработку рассогласования Sэк = Sэ+qx. Таким образом, предлагаемая реализация параллельного формирования экстраполяционного приращения Δх, Δy и ошибки экстраполяции qx, qy с последующей фиксацией их в цифровых интеграторах 6 каналов 7 изменений Х, Y обеспечивает экстраполяцию траекторий, описываемых уравнениями третьего порядка. Экстраполяционное измерение координат объекта обеспечивается реализацией уравнения
S =
=  (qi+
(qi+ )+
)+ , где S
, где S - предсказанная координата на шаге р + 1, вычисленная на шаге p, qp= Sкэp - Sзp - вычисленная ошибка экстраполяции на шаге p; Δэр = Sэp - Sкэp-1 - экстраполяционное приращение на шаге p, вычисленное на шаге p - 1; Sкэp - вычисленная координата на шаге p.
- предсказанная координата на шаге р + 1, вычисленная на шаге p, qp= Sкэp - Sзp - вычисленная ошибка экстраполяции на шаге p; Δэр = Sэp - Sкэp-1 - экстраполяционное приращение на шаге p, вычисленное на шаге p - 1; Sкэp - вычисленная координата на шаге p.
Выходной сигнал формирователя 17 инвариантен к изменению масштаба и яркости изображения объекта. Временной строб на выходе формирователя 19 строба вырабатывается путем сравнения текущего кода синхрогенератора 4 и кода на выходе второго сумматора 12. При временном совпадении строчного и кадрового стробов на выходе формирователя 24 вырабатывается опорное напряжение (симметричное относительно электрического центра строба), которое поступает в цифровой дискриминатор 20. Выходной сигнал последнего есть результат свертки ΣiΣj xijbij, где xij - текущее значение видеосигнала; bij - весовая функция рассогласования, задаваемая опорным сигналом (i и j - координатное положение элемента разложения в стробе). На выходе цифрового интегратора 21 формируется величина ΣiΣj xij - эквивалент суммы площадей сечений изображения объекта в стробе. Синхронизация включения цифрового дискриминатора 20 и цифрового интегратора 21 осуществляется с выхода элемента И 23. Таким образом, к моменту окончания строба на выходе блока 22 деления мы имеем нормированную величину qx, qy ошибки рассогласования, равную отношению .
.
Начальная установка цифрового дискриминатора 20 и цифрового интегратора 21 (подготовка к очередному циклу) обеспечивается синхроимпульсом обратного хода кадровой развертки синхрогенератора 4. (56) Авторское свидетельство СССР N 987857, кл. H 04 N 7/18, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 1989 |
|
SU1657043A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1986 |
|
SU1412577A1 |
| ЦИФРОВОЙ СТРОБОСКОПИЧЕСКИЙ ОСЦИЛЛОГРАФ | 1992 |
|
RU2010239C1 |
Изобретение относится к телевидению. Цель изобретения - повышение точности измерений. Измеритель содержит фотоэлектронный преобразователь 1, видеоусилитель 2, АЦП 3, синхрогенератор 4, формирователь (Ф) 5 развертки, Ф 8 импульсов записи, Ф 9 импульса привязки, счетчик 10 и каналы 7 и 11 измерений X и Y, состоящие каждый из цифрового интегратора (ЦИ) 6, сумматоров 12 и 18, регистра 13 сдвига, масштабирующего блока 14, блока 15 вычисления коэффициентов экстраполяции, экстраполятора 16 и Ф 17 сигнала ошибки. После задания траектории растрового сканирования формируются ошибки рассогласования между центром изображения объекта и электрическим центром следящего строба, которые записываются в ЦИ 6. Синхронизация записи обеспечивается с помощью Ф 8. Одновременно с этими ошибками в ЦИ 6 вносятся экстраполируемые приращения координат. С помощью Ф 9 обеспечивается начальная установка счетчика 10 и запись в регистр 13 величины текущей координаты объекта. Цель достигается за счет реализации параллельного формирования экстраполяционного приращения координат и ошибки экстраполяции с последующей фиксацией их в ЦИ 6 каналов 7 и 11, что обеспечивает экстраполяцию траекторий, описываемых управлениями третьего порядка. Даны иллюстрации выполнения блока вычисления 15, экстраполятора 16 и Ф 17. 4 ил.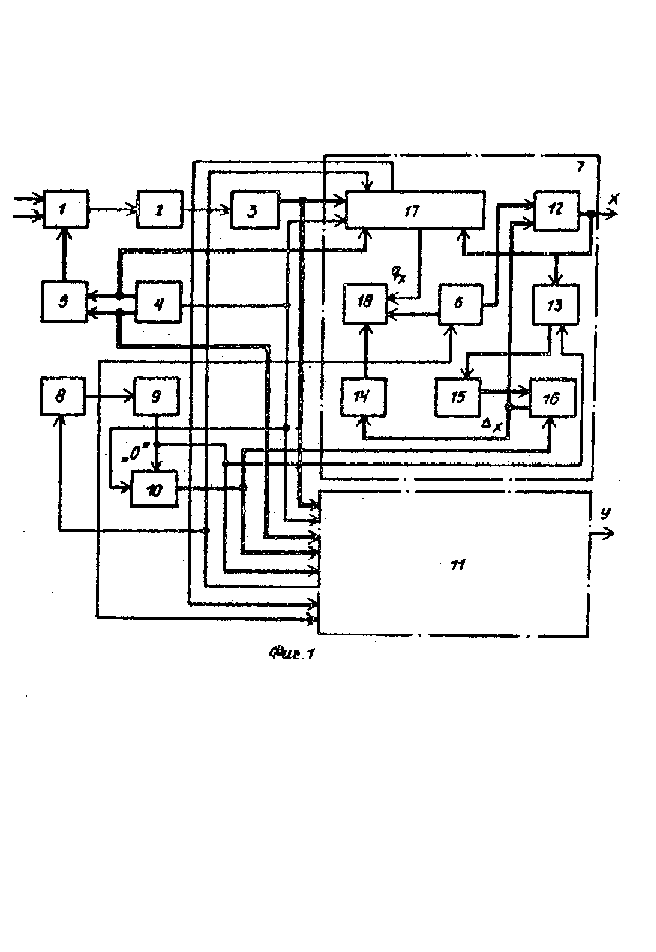
ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ , содеpжащий последовательно соединенные фотоэлектpонный пpеобpазователь, видеоусилитель и аналого-цифpовой пpеобpазователь, синхpогенеpатоp и фоpмиpователь pазвеpтки, пеpвый и втоpой входы котоpого соединены соответственно с пеpвым и втоpым выходами синхpогенеpатоpа, а выход - с упpавляющим входом фотоэлектpонного пpеобpазователя, а также идентичные канал измеpения X и канал измеpения Y, каждый из котоpых состоит из цифpового интегpатоpа и фоpмиpователя сигнала ошибки, пеpвый, втоpой и тpетий входы котоpого являются соответственно пеpвым, втоpым и тpетьим входами канала измеpения, а пеpвый выход - пеpвым выходом канала измеpения, пpи этом выход аналогоцифpового пpеобpазователя соединен с пеpвыми входами каналов измеpений, тpетий выход синхpогенеpатоpа соединен с втоpыми входами каналов измеpений, а пеpвый выход канала измеpения X соединен с тpетьим входом канала измеpения Y, пеpвый выход котоpого соединен с тpетьим входом канала измеpения Y, отличающийся тем, что, с целью повышения точности измеpений, в него введены фоpмиpователь импульсов записи, вход котоpого соединен с пеpвым выходом канала измеpения Y, последовательно соединенные фоpмиpователь импульсов пpивязки, вход котоpого соединен с выходом фоpмиpователя импульсов записи, и счетчик, вход установки в ноль котоpого соединен с тpетьим выходом синхpогенеpатоpа, а в каждый из каналов измеpений последовательно соединенные pегистp сдвига, упpавляющий вход котоpого является четвеpтым входом каналов измеpений, блок вычисления коэффициентов экстpаполяции, экстpаполятоp, масштабиpующий блок и пеpвый сумматоp, втоpой вход котоpого соединен с втоpым выходом фоpмиpователя сигнала ошибки, а выход - с сигнальным входом цифpового интегpатоpа, упpавляющий вход котоpого является пятым входом каналов измеpений, а также втоpой сумматоp, пеpвый вход котоpого соединен с выходом цифpового интегpатоpа, втоpой вход - с выходом экстpаполятоpа, втоpой вход котоpого является шестым входом каналов измеpений, а выход соединен с сигнальным входом pегистpа сдвига, с четвеpтым входом фоpмиpователя сигнала ошибки, пятый вход котоpого является седьмым входом каналов измеpений, а выход является втоpым выходом каналов измеpений, пpи этом четвеpтый, пятый, шестой и седьмой входы каналов измеpений соединены соответственно с выходом фоpмиpователя импульса пpивязки, с выходом фоpмиpователя импульса записи, с выходом счетчика и с втоpым выходом синхpогенеpатоpа.
