между опорными направлениями излучения первого и третьего радиосигналов, определяют азимут, модуль которого равен половине угла сдвига между задержанным первым и вторым сигналами модуляции, а знак соответ ствует знаку суммы или разности угла фазового сдвига между задержанным третьим и четвертым сигналами модуляции и удвоенного значения угла между опорными направлениями излучения первого и третьего радиосигналов, модуль из которых равен модулю угла фазового сдвига между задержанным первым и вторым сигналами модуляции. 2.Устройство определения азимута содержащее радиомаяк, включающий генератор низкой частоты, генератор высокой частоты, направленную антенну, ненаправленную антенну, фазовращатель и блоквращения диаграммы направленности, содержащий два балансных мо/г.улятора, первые входы которых соединены между собой и являются первым входом блока вращения диаграммы направленности, двумя выходами которого являются выходы двух балансных модуляторов, которые соединены соответственно с двумя входами направленной антенны, вхЬд ненаправленной антенны соединен с первым входом блока вращения диаграммы направленнрсти, втооой вход которого является вторым входом первого балансного модулятора и соединен с выходом фазовращателя, приемоиндикатор, включающий соединенные последовательно антенну, приемник, амплитудный и фазовый детекторы . и индикатор, отличающеес я тем, что, с целью повышения точности определения азимута, в радиомаяк введены соединенные последовательно первьй коммутатор, фазоинвертор и второй коммутатор, выход которого соединен с третьим входом блока вращения диаграммы направленности, являющимся вторым входом второго баТ лансного модулятора, кпоч, первый вход и выход которого соединены соответственно с выходом генератора высокой частоты и. входом ненаправленнрй антенны, блок изменения начального положения диаграммы направленности, выход которого соединен с первы входом первого коммутатора, и блок управления, первый вход которого соединен с выходом генератора низкой частоты, первым входом блока изменения начального положения диаграммы направленности и вторым входом первого коммутатора, третий вход которого соединен с первым выходом блока управления, второй выхолИ второй вход которого соединены соответственно с вторым входом ключа и вторыми входами блока изменения начального положения диаграммы направленности и второго коммутатора, третий вход которого соединен с входами фазовращателя и фазоинвертора, в приемоиндикатор введены блок хранения фчзы, вычислитель и блок управления, первый вход блока хранения фазы соединен с выходом амплитудного детектора и первым входом блока управления, второй вход которого соединен с вторым входом фазового детектора и выходом блока хранения фазы, второй вход которого соединен с первым входом вычислителя и первым выходом блока управления, второй выход которого .соединен с вторым входом вычислителя, третий вход которого соединен с выходом фазового детектора, два выхода вычислителя соединены соответственно с двумя входами индикатора. 3. Устройство по п. 2, о т л и ч а ю щ ее с я тем, что блок изменения начального положения диаграммы направленности радиомаяка содержит две фазосдвигаюцие цепи и коммутатор, два входа которого соединены соответственно с выходами двухфазосдвигающих цепей, входы которых соединены между собой и являются первым входом блока изменения начального положения диаграммы направленности, вторым входом и выходом которого являются Соответственно третий вход и выход коммутатора. . Устройство по п. 2, от ли Ч а ю щ е е с я тем, что блок управления радиомаяка содержит соединен- . ные последовательно первый и второй делители частоты, первый элемент И, элемент задержки и второй элемент И, инвертор, вход и выход которого соединены соответственно с выходом первого делителя частоты и вторым входом первого элемента И, выход которого соединен с вторым входом второго элемента И, выход и вход первого делителя частоты, выход второго дели-v теля частоты и выход второго элемента И являются соответственно первым и вторым выходами, первым и вторым входами блока управления радиомаяка. 5.Устройство по п. 2, отличающееся тем, что блок хранения фазы приемоиндикатора содержит соединенные последовательно ключ и линию задержки, выход которой являет ся выходом блока хранения фазы приемоиндикатора, первым и вторым входам .которого являются соответственно пер вый и второй входы ключа. 6.Устройство по п. 2, о т.л и чающееся тем, что блок управ ления приемоиндикатора содержит первый и второй детекторы, дифференцирующую цепь и элемент И, первый вход которого соединен с выходом первого детектора и входом дифференцирующей цепи, выход второго детектора соединен со вторым ВЖ1ДОМ элемента И, вхо ды первого и второго детекторов, выходы элемента И и дифференцирующей цепи являются соответственно первым и вторым входами, первым и вторым выходами блока управления приемоиндикатора. 7.Устройство по п. 2, отличающееся тем, что вычислител приемоиндикатора содержит триггер, соединенные последовательно первый элемент И, первый ключ, первый элемент памяти, блок сложения, первый блок сравнения, второй ключ и элемент ИЛИ, соединенные последовательно второй элемент И, третий ключ, второй 1 96 элемент памяти и делитель на два, соединенные последо зательмо блок вычитания, второй блок с(5авнения и четВертый ключ, третий элемент памяти, первый вход триггера, лоляющийся первым входом вычислителя приемоиндикатора, соединен с первыми входами первого и второго элементов И, вторые входы которых соединены с соответствующими выходами триггера, второй вход которого, являющийся вторым входом вычислителя приемоиндикатора, соединен с вторыми входами первого и второго элементов памяти, .вторые входы первого и третьего ключей соединены между собой и являются третьим входом вычислителя приемоиндикатора, вход блока вычитания соеди ен с входом блока сложения, второй выход и второй вход которого соединены соответственно с вторым входом второго ключа и вторым входом блока вычитания, второй выход которого соединен с вторым входом четвертого ключа, выход которого соединен с вторым входом элемента ИЛИ, выход которого является одним выходом вичислителя при-емоиндикатора, другим выходом которого является выход делителя на два, вход которого соединен с вторыми входами первого и второго блоков сравнения, выход третьего элемента памяти соединен с вторым входом блока вычитания, вход третьего элемента пймяти является четвертым входом вычислителя приемоиндикатора.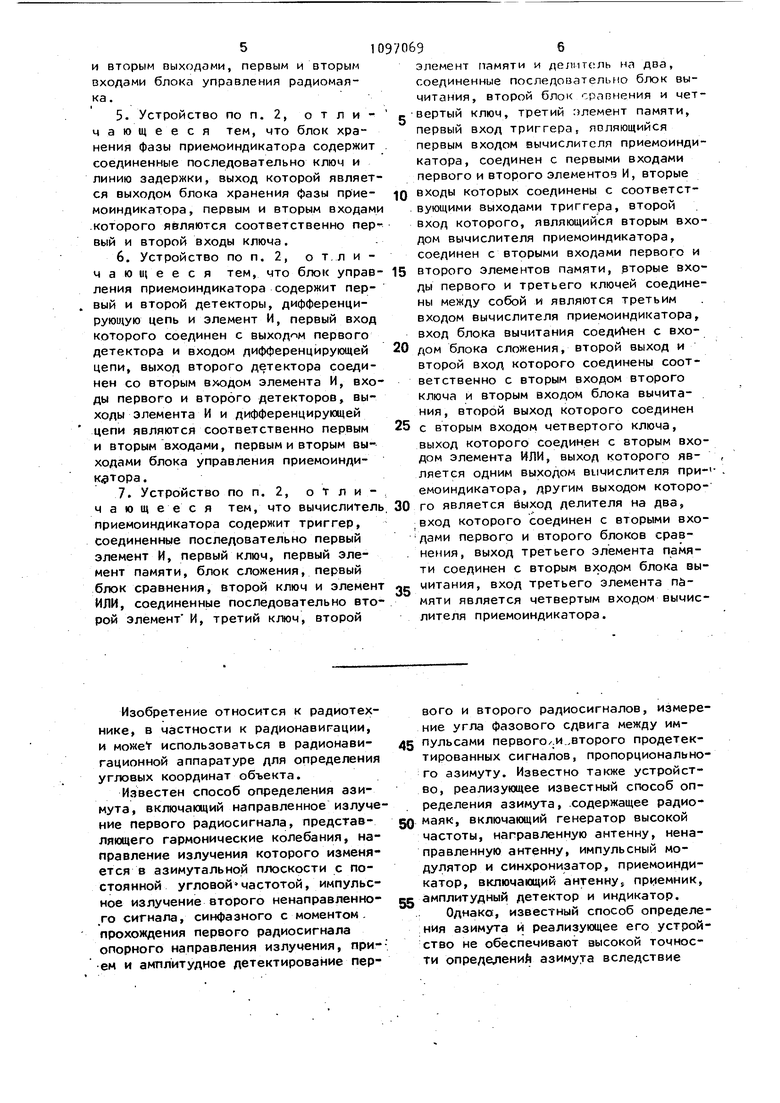
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения азимута | 1984 |
|
SU1190746A2 |
| Устройство определения азимута | 1984 |
|
SU1190747A2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| Система измерения азимута летательного аппарата относительно радиомаяка | 1984 |
|
SU1181398A1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ И РАДИОПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2303274C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ РАДИОСИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2184980C1 |
| РЕТРАНСЛЯТОР | 2023 |
|
RU2808202C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2020 |
|
RU2739486C1 |
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ И РАДИОПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2598648C1 |

1. Способ определения азимута, включающий направленное излучение первого радиосигнала, представляющего собой гармонические колебания ограниченной длительности, направление излучения которого изменяется в азимутальной плоскости с постоянной угловой частотой, а опорное направление излучения синфазно с началом его излучения, прием и амплитудное детектирование первого радиосигнала, фильтрацию первого сигнала модуляции, образовавшегося в результате изменения направления излучения первого радиосигнала с постоянной угловой частотой, отличающийся тем, что, с целью повышения точности слпределения азимута, дополнит.ельно направленно излучают последовательно три радиосигнала, фор.ма. и угловая частота изменения направления излучения в азимутальной плоскости которых одинаковы с формой и угловой частотой изменения направления излучения в азимутальной плоскости первого радиосигнала, опорное направление излучения второго радиосигнала, синфазное с началом его излучения., совпадает с опорным направ2 лением излучения первого радиосигнала, а опорные направления излучения третьего и четвертого радиосигналов, сов1),-,(цие один с. другим и синфазные с началом их излучения, сдвинуты на некоторый-, угол относительно опорного направления излучения) первого радиосигнала, знак угловоГ частоты изменения направления излучения третьего радиосигнала соответствует знаку угловой частоты изменения направ леиил излучения перр.ого радиосигнала, а знаки угловых частот изменениянаправления излучения второго и четвертого радиосигналов противоположнь ему, принимают и детектируют по ам,плитуде .второй, третий и четвертый радиосигналы, фильтруют второй, третий и четвертый сигналы модуляции, образовавшиеся в результате изменения направления излучения второго, третьего и четвертого радиосигналов с постоянной угловой частотой, заг держивают первый сигнал модуляции на время, равное временному интервалу О между началом излучения первого раю диосигнала и началом излучения второXI го радиосигнала, измеряют угол фазоО вого сдвига между задержанным первым О и вторым сигналами модуляции, задерю живают третий сигнал модуляции на . время, равное временному интервалу : между началом излучения третьего радиосигнала и началом излучения четвертого радиосигнала, измеряют угдл фазового сдвига между задержанным третьим и четвертым сигналами модуг. ляции, определяют сумму и разность угла фазового сдвига между задержанным третьим и четвертым сигналами модуляции и удвоенного значений угла

Изобретение относится к радиотехнике, в частности к радионавигации, и можеТ использоваться в радионавигационной аппаратуре для определения угловых координат объекта.
Известен способ определения азимута, включающий направленное излучение первого радиосигнала, представляющего гармонические колебания, направление излучения которого изменяется в азимутальной плоскости с постоянной угловой частотой, импульсное излучение второго ненаправленно го сигнала, сикн1 азного с моментом . прохождения первого радиосигнала опорного направления излучения, прием и амплитудное детектирование первого и второго радиосигналов, измерение угла фазового сдвига между им45 пульсами первого/.и..второго продетектированных сигналов, пропорционального азимуту. Известно также устройство, реализующее известный способ определения азимута, .содержащее радио50 маяк, включающий генератор высокой частоты, натравленную антенну, ненаправленную антенну, импульсный модулятор и синхронизатор, приемоиндикатор, включающий антенну, приемник,
gg амплитудный детектор и индикатор.
Однако, известный способ определения азимута и реализующее его устройство не обеспечивают высокой точности определений азимута вследствие
сравнительно широкой диаграммы направленности излучения .направленного радиосигнала.
Наиболее близким техническим решением к изобретению является способ определения азимута, включающий направленное излучение первого радиосигнала, представляющего собой гармонические колебания ограниченной длительности, направление излучения которого изменяется в азимутальной плоскости с постоянной угловой частотой, а опорное направление излучения синфазно с началом его излучения, прием и амплитудное детектирование первого радиосигнала,, фильтрацию .первого сигнала модуляции, образовавшегося в результате изменения направления излучения первого радиосигнала с постолинор1 угловой частотой, и устройство определения азимута, содержащее радиомаяк, включающий генератор низкой частоты, генератор высокой частоты, направленную антенну,, ненаправленную антенну, фазовращатель и . блок вращения диаграммы направленности, содержащий двабалансных модулятора« первые входы которых соединены собой и являются первым входом блока вращения диаграммы направленности, двумя выхоДами которого являются выходы двух балансных модуля торов, которые соединены соответ.ственно с АЕ.умя выходами направленной антенны, вход ненаправленной антенны соединен с первым входом блока вращения диаграммы направленности, второй вход которого является вторым входом первого балансного модулятора и соединен с выходом фазовращателя, приемоиидикатор, включающий соединенные последовательно антенну, приемник, амплитудный и фазовый детекторы и индикатор ,,
Однако известные способ и устройство определения азимута не обеспечивают требуетй точности определения азимута, вследствие излучения радиосигналов paзньjMи антеннами и обработки принятых сигналов, несущих инфорЧ мацию о азимуте, в разных трактах, .
Цель изоСретенил - повышение точности определения азимута.
Лля этого допелнител.ьно направленно излучают последовательно три ра-, Д1;осигнала, форма и угловая частота изменения напрепвления излучения в азимутальной плоскости которых одина ковы с формой и угловой частотой изменения направления излучения в азимутальной плоскости первого радиосигнала, опорное направление излучения второго радиосигнала, синфазное с началом его излучения, совпадает с опорным направлением излучения первого радиосигнала, а опорные направления излучения третьего и четвертого радиосигналов, совпадающие один с другим,и синфазные с началами их излучения, сдвинуты на некоторый угол относительно опорного направления излучения первого радиосигнала, знак угловой частоты изменения направления излучения третьего радиосигнала соответствует знаку угловой частоты изменения направления излучения первого радиосигнала, а знаки УГЛОВЫХ частот изменения направления излучения втррого и четвертого радиосигналов противоположны ему, принимают и детектируют по амплитуде второй, третий и четвертый радиосиг налы, фильтруют второй, третий и четвертый сигналы модуляции, образовавшиеся в результате изменения- направления излучения второго, третьего и четвертого радиосигналов с постоян.ной угловой частотой, задерживают первый сигнал модуляции на время, равное Временному интервалу между началом излучения первого радиосигнала и началом излучения второго радиосигнала, измеряют угол фазового сдвига между задержанным первым и вторым сигналами модуляции, задерживают третий сигнал модуляции на время, равное временному интервалу между началом излучения третьего радиосигнала и началом излучения четвертого радиосигнала, измеряют угол фазового сдвига между задержанным третьим и четвертым сигналами модуляции, опредеЛяют сумму и разность угла фазового сдвига между задержанным третьим и четвертым сигналами модуляции и удвоенного значения угла между опорными направлениями излучения первого и третьего радиосигналов, определяют азимут, модуль которого равен половине угла фазового сдвига между держанным первым и вторым Сигналами модуляции, а знак соответствует знаку суммы или разности угла фазового сдвига между задержанным третьим и четвертым сигналами модуляции и удвоенного значения, угла между опорны
ми направлениями излучения первого и третьего радиосигналов, модуль из которых равен модулю угла фазового сдвига между задержанным первым и g вторым сигналами модуляции.
В предлагаемом устройстве, в радиомаяк введены соединенные последо-. вательно первый коммутатор, фазоин- вертор и второй коммутатор, выход IQ которого соединен с третьим входом блока вращения диаграммы направленности, являщимся вторым входомвторого ЧЗалансиого модуллтора,ключ, первый вход и выход которого сое- ig динены соответственно с выходом генератора высокой частоты и входом ненаправленной антенны, блок изменения начального положения диаг: раммы направленности, выход которого 20 соединен-с первым входом первого коммутатора, и блок управления, первый вход которого соединен с выходом генератора низкой частоты,, первым
: входом блока изменения Начального по- 25
, лржёния диаграммы направленности и вторым входом первого коммутатора,; третий вход КОТОРОГО соединен с первым выходом блока управления, второй выход и второй вход которого соедине- 30 ны соответственно с вторым входом ключа и вторь1ми входами изменения начального положения диаграммы направленности и второго коммутатора, , ретий вход которого соединен с вхо- j дами фазовращателя и фазоинвертора,
в приемоиндикатор введены блок хра- / нения фазы, вычислитель и блок управления, первый вход блока хранения фазы. соединен с выходом амплитудного JJQ детектораи первым входом блока управления, второй вход которого соединен с вторым входом фазового детектора и выходом блока хранения фазы, второй вход которого соединен с пер- 45 вым входом вычислителя и первым выходом .блока управления, второй выход которого соединен с вторым входом вычислителя, третий вход которого ; ; соединен с выходом фазового детекто- g pa, два выхода вычислителя соединены соответственно с двумя входами индикатора, блок изменения начального положения диаграммы направленности радиомаяка содержит Две фазосдвигающие
.цепи и коммутатор, два входа которо- . го соединены соответственно с выхо|дами двух фазосдвигающих цепей, вхо- ,
ды которых соединены между собойfr
являются первым ьходом блока изменения начального положения диаграммы направленности, вторым входом и выходом которого являются соответственно третий вход и выход коммутатору, блок управления радиомаяка содержит соединенные последовательно первый и ВТО рой делители частоты, первый элемент И, элемент задержки и второй элемент И, инвертор, вход и выход которого соединены соответственно с выходом первого делителя частоты и вторым., входом первого элемента И, выход которого соединен с вторым входом второго элемента И, выход и вход первого делителя частоты, выход второго . делителя частоты и выход второго элемента И являются .соответственно первым и вторым выходами, первым и вторым входами блока управления радиомаяка, блок хранения фазы приемоиндикатора содержит соединенные последовательно ключ и линию задержки, выход которой является выходом блока хранения фазы приемоиндикатора, первым и вторым входами которого являются соответственно первый и второй входы ключа, блок. упра1эления приемоиндикатора содержит первый и второй детекторы, дифференцирующую цепь и: элемент И, первый вход которогосоединен с выходом первого детектора и . входом дифференцирукщей цепи, выход
второго детектора соединен с вторым входом элемента 14, входы первого и второго детекторов, выходы элемента И и дифференцирующей цепи являются со- ответственно первь1м и вторым входами, первым и вторым выходами блока управления приемоиндикатора, вычислитель приемоиндикатора содержит триггер, соединенные пocJr)eдoвaтeльнo первый элемент И, первый ключ, первый эле-;/ мент памяти, блок сложения, первый ; блок сравнения, второй ключ и элемей ИЛИ, соединенные nocneflOBaTenbHOV втброй элемент И, третий ключj второй ,, элемент памяти и делитель на два, ;;;, соединенные последовательно блок eii-. митания, второй блок сравнения и ,Цетл вертый ключ, третий элемент памят иу первый вход триггера, являющийсяпервым входом вычислителя приемоиндикаЧ тора, соединен с первыми входами вого и второго элементов И, вторые входы которых соединены с соответст вующими выходами триггера, втгорой
вход КОТЬРОГО, являющийся BTOpHjN J дом вычислителя приемоиндикатора, соединен с вторыми входами первого и второго элементов памяти, вторые . входы первого и третьего ключей соединены между собой и являются третьим входом вычислителя приемоиндикатора, вход блока вычитания соединен с входом блока сложения, второй выход и второй вход которого соединены соответственно с вторым входом ВТОРОГО ключа и вторым входом блока вычитания, второй выход -которого соединен с вторым входом четвертого ключа, выход которого соединен с вторым входом элемента ИЛИ, выход которого является одним выходом вычислителя приемоиндикатора, другим выходом которого является выход делителя на два, вход которого соединен с вторыми входами первого и второго блоков сравнения, выход третьего эяемента памяти соединен с вторым входом блока вычитания, вход третьего элемента памяти является четвертым входом вычислителя приемоиндикатора.
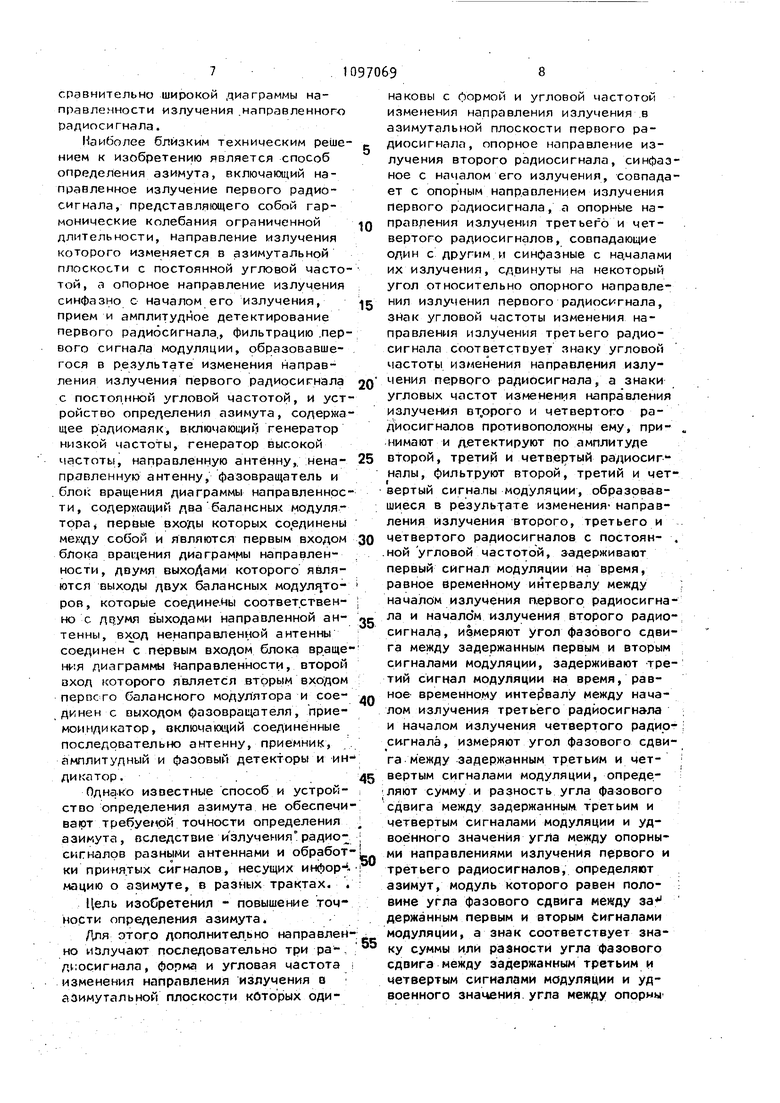
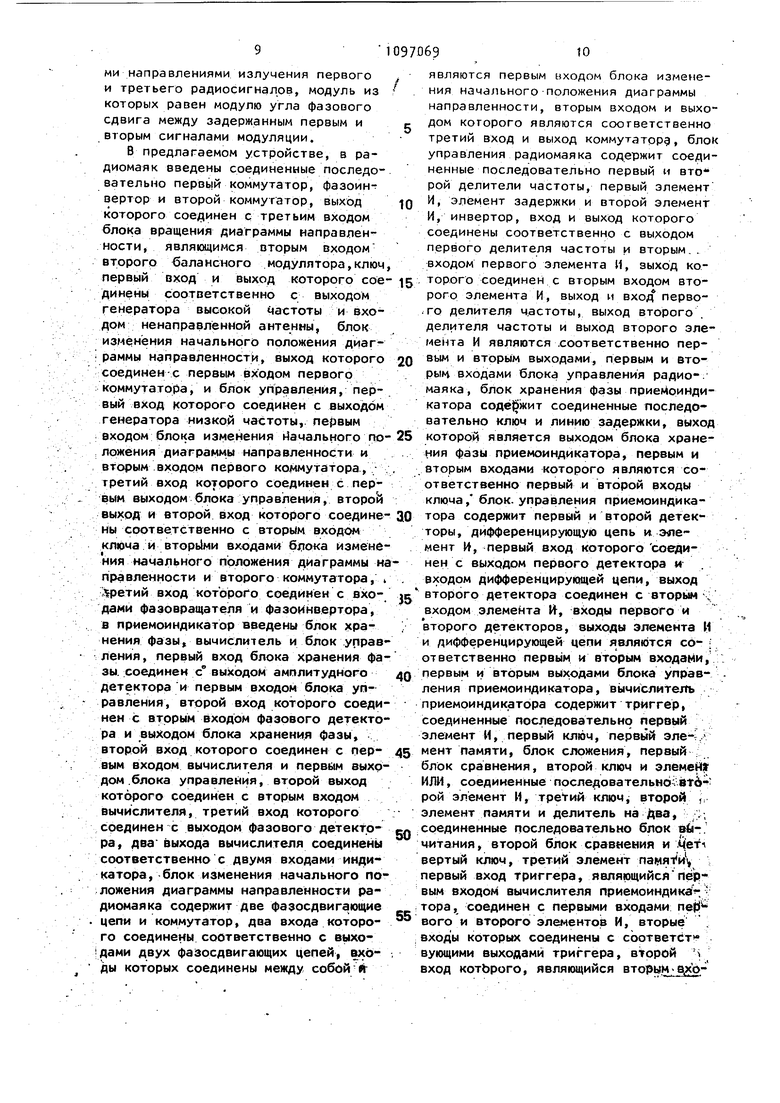
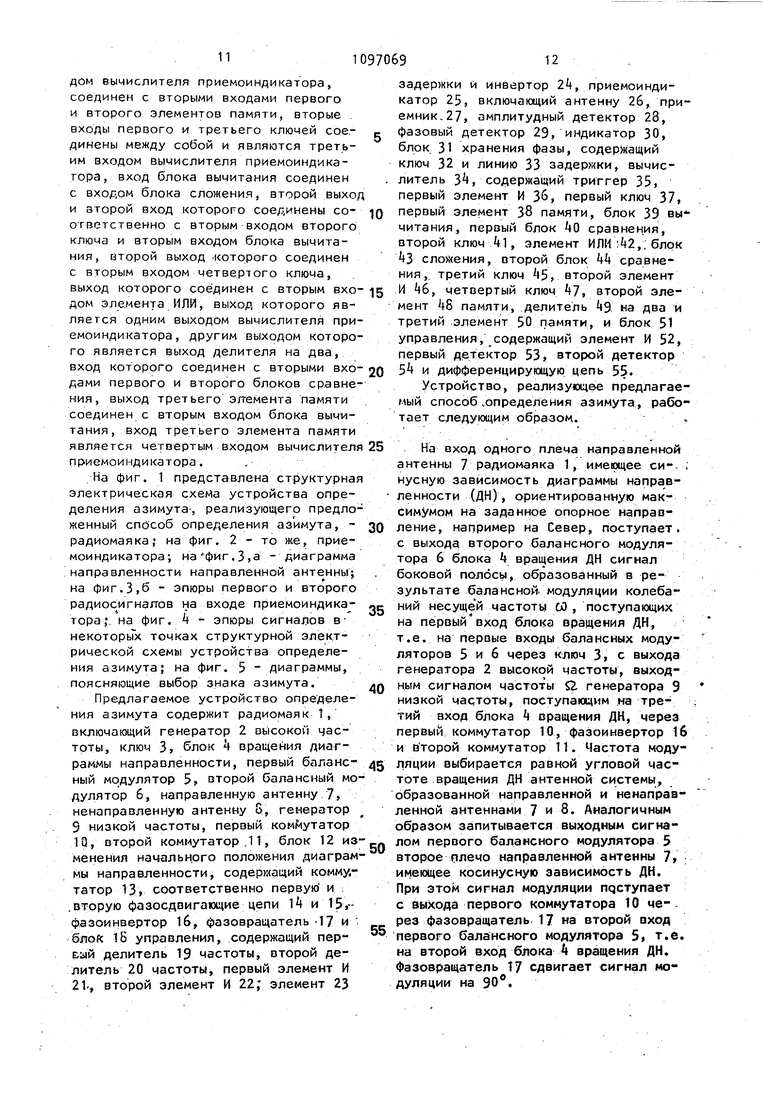
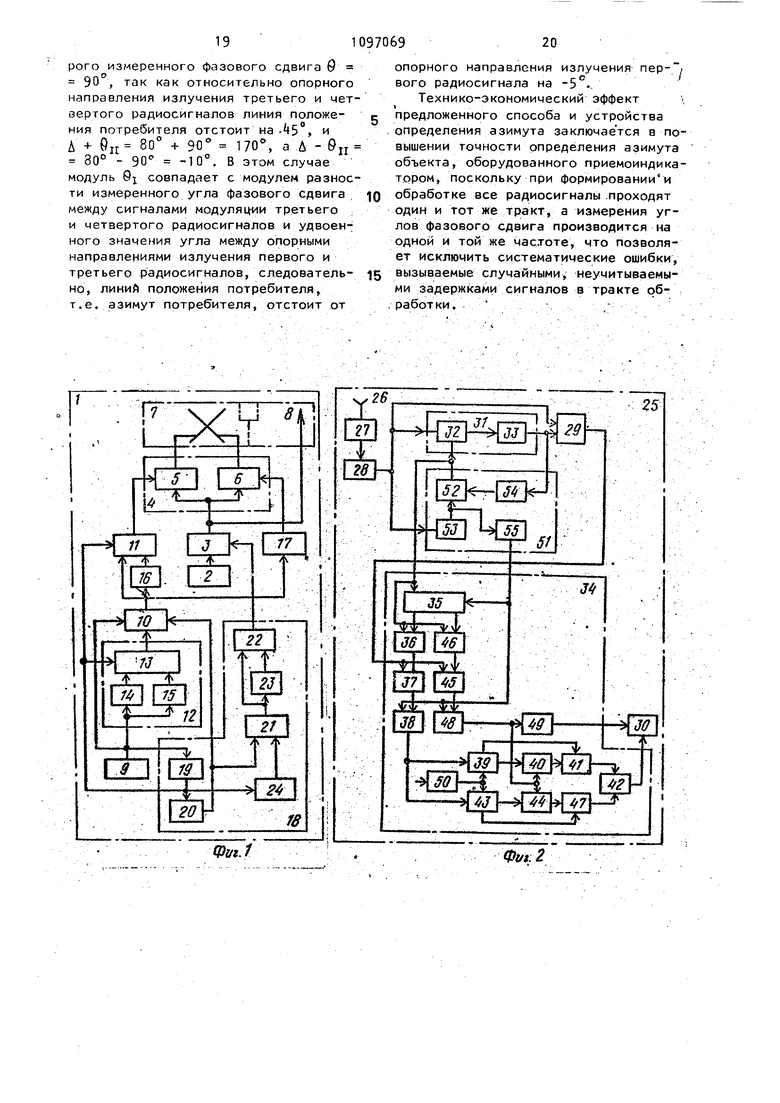
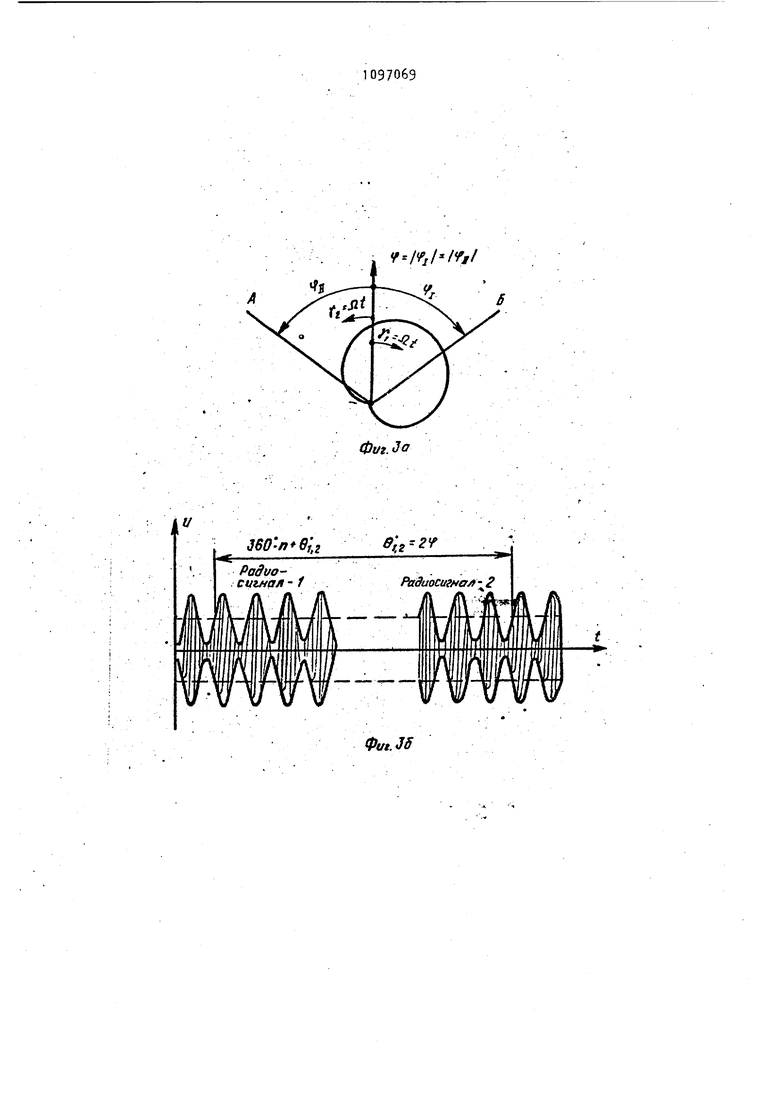
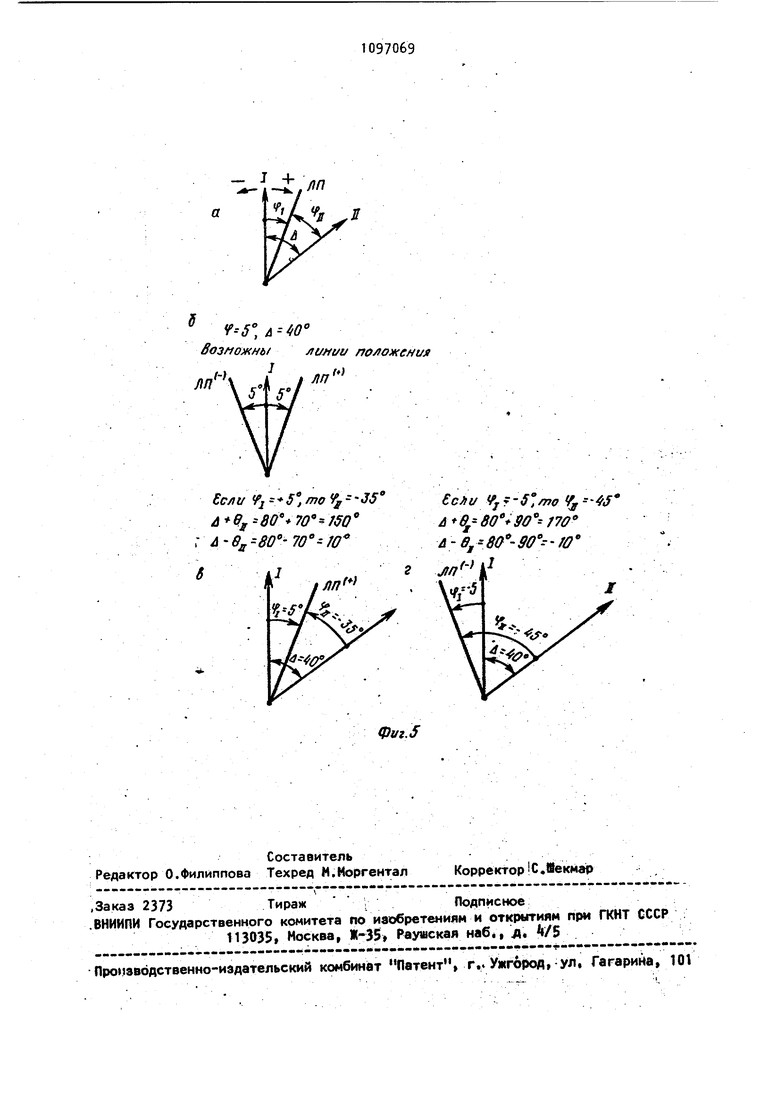
.На фиг. 1 представлена структурная электрическая схема устройства определения азимута-, реализующего предложенный спбсоб определения азимута, радиомаяка, на фиг. 2 - то же, приемоиндикатора; нафиг. - диаграмма направленности направленной на фиг.3,6 - эпюры первого и второго радиосигналов на входе приемоиндикатора;. на фиг. 4 - эпюры сигналов внекоторьГх точках структурной электрической схемы устройства определения азимута; на фиг. 5 - диаграммы, поясняющие выбор знака азимута.
Предлагаемое устройство определения азимута содержит радиомаяк Т, включающий генератор 2 высокой частоты, ключ 3, блок вращения диаграммы направленности, первый балансный модулятор 5, второй балансный модулятор 6, направленную антенну 7, ненаправленную антенну G, генератор S низкой частоты, первый комйутатор 19, второй коммутатор .11, блок 12 изменения начального положения диаграммы направленности, содержащий комму,татор 13, соответственно первую и .вторую фазосдвигаюцие цепи 14 и 15,фазоинвертор 1б, фазовращатель -17 и блок 15 управления, содержащий перьай делитель Т9 частоты, второй делитель 20 частоты, первый элемент И 21-, второй элемент И 22; элемент 23
задержки и инвертор 2k, приемоиндикатор 25, включающий антенну 2б, приемник, 27, амплитудный детектор 28, фазовый детектор 29, индикатор 30, блок 31 хранения фазы, содерЯ(ащий ключ 32 и линию 33 задержки, вычислитель З, содержащий триггер 35, первый элемент И Зб, первый ключ 37, первый элемент 38 памяти, блок 39 вычитания, первый блок сравнения, второй ключЛТ, элемент ИЛИ :42,. блок 3 сложения, второй блок tA сравнения,, третий ключ , второй элемент И k6, четвертый ключ 7, второй элемент +8 памяти, делитель 9 на два и третий .элемент 50 памяти, и блок 51 управления, содержащий элемент И 52, первый детектор 53, второй детектор 5 и дифференцирующую цепь 55.
Устройство, peaлизy oщe e предлагаемый способ .определения азимута, работает следующим образом.
На вход одного плеча направленной антенны 7 радиомаяка 1, имеющее синусную зависимость диаграммы направленности (ДН), ориентированную максимумом на заданное опорное направление, например на Север, поступает, с выхода второго балансного модулятора 6 блока 4 вращения ДН сигнал боковой полосы, образованный в результате балансной, модуляции колебаний несущей частоты СО, поступающих на первый вход блока вращения ДН, ; т.е. на первые входы балансных модуляторов 5 и 6 через ключ 3, с выхода генератора 2 высокой частоты, выходным сигналом частоты О. генератора Э низкой частоты, поступающим на третий вход блока 4 вращения ДН, через первый коммутатор 10, фазоинвертор 16 и второй коммутатор 11. Частота модуляции выбирается равной угловой частоте вращения ДН антенной системы, образованной направленной и ненаправленной антеннами 7 и 8. Аналогичным образом запитываеТся выходным сигналом первого балансного модулятора 5 второе плечо направленной антенны 7, имеющее косинусную зависимость ДН. При этом сигнал модуляции пдступает с выхода первого коммутатора 10 че-рез фазовращатель 17 на второй вход первого балансного модулятора 5 т.е. на второй вход блока Л вращения ДН. Фазовращатель Т7 сдвигает сигнал модуляции на 90°. Сигнал, излучаемый первым плечом направленной антенны 7, можно представить выражением Е-cosi -cossit х xsincot, а сигнал, излучаемый вторым плечом направленной антенны 7, выра хением Е-sinq -sinct sinOt. На вход ненаправленной антенны S через ключ 3 с выхода генератора 2 высокои частоты поступает гармоничес- Q
кии сигнал, который можно представит выражением ESincpt.
Суммарное поле, излучаемое антенной системой радиомаяка 1, представляется выра)хением
Е l cos(S2t -Cf)sinCOt.
Это выражение показывает, что суммерная диаграмма направленности антенной системы радиомаяка 1 имеет вид кард оиль1 (иг.3,а), вращакнцейся с угловой частотой Q, ив каждой точке пространства на пряженность подя имеет амплитудную модуляцию гармоническим сигналом частоты 60. Вид сигнала на входе приемоиндикатора 25 устройства, определения .азимута показан на фиг Jt,3. Направление вращения диаграммы направленности антенной системы зависит от знака угла фазового сдвига сигналами модуляции, поступающими на второй и третий входы блока k вращения ДН, абсолютное значение которого всегда равно 90 . Изменение знака этого угла фазо-35 вого сдвига, а значит, и изменение направления вращения диаграммы направленности антенной системы радиомаяка 1 обеспечивается вторым коммутатором 11 , который при излучении первого и третьего радиосигналов пропускает на свой выход сигнал модуляции , поступающий затем на третий вход блока вращения ДН со своего третьего входа. При излучении второго и четвертого радиосигналовмодулирующий сигнал на третий вход блока 4 вращения ДН поступает через фазоинвертор 16, первый вход и выход второго коммутатора 11. При этом фазоинвертор 16 изменяет фазу модуяирупце1го 180 сигнала на lou, т.е. при излучении второго и четвертого радиосигналов I знак угла фазового сдвига изменяется :на -противоположный. Начальные опорные направления диаграммы направленности антенной системы радиомаяка, синфазные с началом излучения радиосигналов, определяются начальной фаступает на первый вход первого коммутатора 10 через блок 12 изменения начального положения диаграммы направленности. При этом при излучении третьего и четвертого радиосигналов фаза сигнала модуляции на выходе первого коммутатора 10 определяется соответственно фазосдвигающими цепями } и 15 блока изменения начального положения ДН, коммутируемыми коммутатором 13 этого блока.
Таким образом, первый радиосигнал, излучаемый а,нтенной системой радио маЬка, определяется выражением Е |Jl + + cos(sit-tf)Jsinb3t, второй радиосигнал определяется выражением Е . + + cos(Qt +ср)1. sinwt, третий и четвертый радиосигналы определяются соoTseTctBCHHo выражениями Е С 1 + cosCOt -Cf -Л ) J sinult и Е Hi + + cos tot + ц +&)J sinyt.
Коммутирующие сигналы, определяющие вид радиосигналов, порядок излучения радиосигналов, их начальные Q 9 ЗОИ модулирующего сигнала на выходе первого коммутатора 10. При излучении первого и второго радиосигналов сигнал модуляции поступает на выход первого коммутатора 10 с выхода генератора 9 низкой частоты через второй вход первого коммутатора 10, а при излучении третьего и четвертого радиосигналов модулирующий сигнал поопорные направления излучения, синфазные с началом излучения соответствующих сигналов, формируются блоком 18 управления радиомаяка 1. Сигналы с выхода генератора 9 низкой частоты поступают на вход первого делителя Iji частоты блока Т8 управления, на его выходе формируются импульсы (фиг.), частота следования которых в два раза меньше частоты следования радиосигналов,излучаемых антенной системой радиомаяка (фиг.5,а). При наличии сигнала на выходе первого делителя 19 частоты формируются первый и третий радиосигналы, т.е. нечетные радиосигналы. Импульсы :с выхода пе0-/. вого делителя 19 частоты поступают на второй вход второго коммутатора 11 ,и обеспечивают коммутацию сигналов, управляющих направлением вращения ди-; аграммы направленности антенной сие темы радиомаяка. Импульсы на выходе второго делителя 20 частоты (фиг.г.в) определяют длительность второй пары , радиосигйалов, они поступают на вход первого коммутатора 10, которые коммутируют начальную Фазу сигнала модуляции, формируемую блоком 12 изменения начального положения ДН В результате логического умножения на первом элементе И 21 сигнала, поступающего с выхода второго делителя 20 частоты (фиг,t,в), и инвестируемого инвертором 2k сигнала, поступающего с выхода первого двигателя 19 частоты (фиг.,г), формируется сигнал, временное положениекоторого соответствует интервалу времени излучения четвертого раидосигнала (фиг.4,д). Данный сигнал задерживается в элементе 23 задержки на временной интервал М, равный необходимой длительности метвертого радиосигнала. В результате логического умножения на втором элементе И 22 сигтчала с выхода элементл 23 задержки и сигнала с выхода первого элемента И 21 формируется сигнал, поступающий на ключ 3. Р.здиомаяка 1 (фиг.4,ж), который пpepывaeт излучение четвертого радиосигнала. После излучения серии из четырех радиосигналов цикл работы радиомаяка повторяется. Антенна 26 приемоиндиКатора 25 принимает радиосигналы, которые усиливаются и селектируются в приемнике 27 и детектйрунзтся амплитудным детек тором 28. Отфильтрованные сигналы мо дуляции, выделенные амплитудным детектором 28 (фиг.,и), поступают на .первые входы блока 31 хранения фазы, блока 51 управления приемоиндикат.ора. и фазового детектора 29..Детектор.53 блока управления выделяет огибающую сигнала модуляции, после, дифференцирования которой дифференцирующей Цепью 55 формируется сигнал синхрони-. зации, синхронный с передним фронтом огибающей первого сигнала модуляции. Сигнаг синхронизации с второго выхода блока 51 управления поступает через второй вход вычислителя 3 на триггер 35 и элементы 38 и 8 па.Няти и .приводит триггер 35 и элементы 38 и 8 памяти в исходное состояние. Первый сигнал модуляции проходит четрез открытый ключ 32 блока хранения фазы и заде;р)кивается в линии 33 задержки на время, равное временному интервалу йёиду началами излучения первого и второго радиосигналов. Задержанный первый сигнал модуляции по ступает на второй вход фазового детектора 29, на первый вход которого поступает одновременно с ним второй сигнал модуляции, соответствующий второму радиосигналу. Фазовый детектор 29 измеряет разность фаз между первым и вторым сигналами модуляции, поступающую на соответствующий вход вычислителя 3+. Задержанный первь1Й сигнал модуляции с выхода блока 31 хранения фазы поступает на второй детектор 5 блока 51 управления приемоиндикатора, огибающая первого задержанного сигнала модуляциис выхода второго детектора 5 (фиг.4,м) поступает на второй вход элемента И . 52, на первый вход которого с выхода первого детектора 53 блока 51 управления поступает огибающая второго сигнала модуляции, а на выходе элемента И 52 формируется сигнал (фиг.4,с), который закрывает ключ 32 блока 31 хранения: фа.зы, а следоват теЛьно, второй сигнал модуляции не проходит на линию 33 задержки и выход блока 31 хранения фазы. .Одновременно сигнал с выхода элемента И 52 поступает на первый вход вычислителя 3 приемомидикатора, т.е. на первый счетный вхрд триггера 35 и вторые входы элементов И. 36 и t6 вычислите-, ля 3, переводя триггер 35 в единичное состояние, которое припускает сигнал разрешения яерез элемент И 46, открывает ключ l5, через этот ключ сигнал С: выхода фазового детектора 29 записывается в элемент 8 памяти. Сигналы на выходе .элемент-а И 52 и элемента И 46 показаны соответственно на фиг.4,и, с Сигнал, записанный вэлемент 48 памяти, пропорционален углу фазового сдвига задержанным первым и вторым сигналами модуля-, ции, т.е. между гармоническими сигналами модуляции первого и второго ра- диосигйалов на входе приемоиндикатора 25. С выхода элемента 48 памяти сигнал по тупает на делитель 49 на два, а с выхода последнего - на индикатор ЗР оторый фиксирует его как модуль определяемого азимута. При приеме третьего и четвертого радиосигналов процесс обработки сигнала в приемоиндикаторе повторяется, при этом появление навходе блока 51 ,управленйя третьего сигнала модуляции, импульс с его второго выхода переводит триггер 35 вычислителя 34 в нулевое состояние и подготавливает эле171мент 38 памяти к записи в него информации, а при однбвременном появлении на первом входе блока 51 управления и втором выходе блока 31 хранения фазы соответственно четвертого и задержанного третьего сигналов модуляции открываются первый элемент И 36 и ключ 37 вычислителя 3, последний пропускает сигнал с выхода фазового детектор а 29 для записи в элемент 38 памяти несущий информацию об угле фазового сдвига между гармоническими сигнала-т ми модуляции третьего и четвертого радиосигналов. Сигнал с выхода, элемента 38 памяти, пропорциональный углу фазового сдвига между гармоническими сигналами третьего и четвертого радиосигналов на входе приемоиндикатора, поступает на первые входы блока 39 вычитания и .блока.3 сложения, на вторые входы которых поступает с выхода третьего элемента 50 памяти сигнал, пропорциональный удвоенному значению угла между опорными направлениями излучения третьего и первого радиосигналов, заложенный в элемент 50 памятиV Модули результатов сложения и вычитания сравниваются в блоках 0 и А сравнения соответственно, с разностью фаз, хранящейся в элементе k8 памяти. Па результатам сравнения открывается ключ il или ключ kj соответственно выходными сигналами блоков 0 или kk сравнения, через которые сигнал, определяющий знак результата вычитания или-сложения, из блока 39 вычитания или блока k сл.ожения поступает через элемент ИЛИ 42 на индикатор 30. Техника измерения азимута и уст. ранения его неоднозначности поясняется фиг.36 и фиг.5, на которых изображены соответственно первый и второй радиосигналы на входе приемоиндикатора и векторные диаграммы радиосигналов, излучаемых антенной системой радиомаяка 1. Если временной интервал между началами излучения первого и второго радиосигналов кратен периоду сигнала с угловой частотой , то фазовый сдвиг между гармоническими сигналами модуляции первого и второго радиосигналов равен ЗбО°-п + О . 2( (if - определяемый азимут), что является следствием противоположных направлений вращения ДН антенной сис темы радиомаяка при излучении соот69ветственно первого и второго радиосигналов. Однако значение азимута неоднозначно, так как сздинаковая разность фаз сигналов Модуляции имеет место при Нахождении потребителя Ksk на линии положения А, так и на линий; положения Б (фиг,3,а), отстоящих от заданного опорного направления излучения на одну и ту же величину угла q д) cfjj , но в разные стороны от опорного направления. Эта неоднозначность устраняется следующим образом. Суммируют второй измеренный фазовый сдвиг зд между сигналами модуляции третьего И четвертого радиосигналов с удвоенной известной вели.чиной смещения их начального опорного направления излучения Л относительно начального опорного направления излучения первого радиосигнала. Вычитают из удвоенной известной величины смещения второй фазовый сдвиг 0-%4 сравнивают величины полученных результатов со значением первого фазового сдвига 0.2. Знаком азимута является знак результата сложения или вычитания, имеющего абсолютное значение, равное. О Начальное опорное направление третьего и четвертого радиосигналов сдвигается в положительном направлении на tO, то есть & 0 (фиг.5,а,б. Например, измеренный фазовый сдвиг между сигналами модуляции первого и второго радиосигналов ©г 10°, что соответсттак как вует азимуту, равному о СР -г-.и4,иг.5,б). Если(рг 5 4 . (фиг.5,в), а измеренный второй фазовый с;Ь|ёиГ между сигналами модуляции третьего и четвертого радиосигналов Вц- 70, то относительно сдвинутого опорного направления излучения третьего радиосигнала линия потреЬителя отстоит на 35 в ту или иную . сторону. Учитывая, что удвоенное значение угловое смещение & 80, то сумма Л + 011 + 70° 150, а разность U - eti 80 - 70 10. Так как модуль -Di совпадает с модулем разности вышеуказанных углоо, то линия положения потребителя отстоит от опорного направления излучения первого радиосигнала на , т.е. азимут потребителя положителен. 0трицательному .значению азимута (фиг.5,г).соответствует величина вт рого измеренного фазового сдвига 0 90 , так как относительно опорного направления излучения третьего и четвертого радиосигналов линия положения потребителя отстоит на Л5°, и А + 011 80° -f 9G° 170, а Д - 0„ 80° - 90 -10°. В этом случае модуль QI совпадает с модулем разности измеренного угла фазового сдвига между сигналами модуляции третьего и четвертого радиосигналов и удвоенного значения угла между опорными направлениями излучения первого и третьего радиосигналов, следовательно, линий положения потребителя, т.е. азимут потребителя, отстоит от
опорного направления излучения пер- / вого радиосигнала на -5°.,
Технико-экономический эффект предложенного способа и устройства определения азимута заключается в повышении точности определения азимута объекта, оборудованного приемоиндикатрром, поскольку при формированиии обработке все радиосигналы .проходят один и тот же тракт, а измерения углов фазового сдвига производится на одной и той же частоте, что позволяет исключить систематические ошибки, вызываемые случайными, неучитываемыми задержками сигналов в тракте обработки.
/7
H
n
1 r
-L
i:
фиг.
J Чa
--5, Возножны /tuftuu положен1/л
c/ii/ Vj -S,moff JS
fff 80 70-/ 0
Лву 80-70 Ю
€cAv Vjr-5mofji - 5 -e,-80 -ffff.-. il
| О.В.Беловин | |||
| Основы радионавигации | |||
| М.: Советское радио, 19б7, с | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Андерсон Э | |||
| Принципы навигации | |||
| И.: Воениздат, , с | |||
| Прибор для измерения угла наклона | 1921 |
|
SU253A1 |
