Изобретение относится к области радиотехники и может использоваться в мобильных комплексах, и резервным дополнением к стационарным системам, радиоразведки и радиоконтроля, радионавигации и радиомониторинга для определения направления на источник излучения или углов прихода радиоволн, преимущественно в декаметровом диапазоне длин радиоволн.
Известны турбофазометрический и мультифазометрический способы определения направления на источник радиоизлучения, включающие круговые системы пар диаметрально разнесенных антенн (Милкин В.И. Турбофазометрический способ определения направления на источник радиоизлучения. Научное приборостроение. Том 9, №4, 1999 г., с. 111-113.; Милкин В.И., Ливерко А.А. Мультифазометрический способ определения направления на источник радиоизлучения. Научное приборостроение. Том 10, №2, 2000 г., с. 91-93). В известных способах пеленгования, с помощью электронных коммутаторов, приемно-измерительных устройств, измеряющих разности фаз между ЭДС, наводимых в антеннах, входящих в каждую из пар и аналого-цифровых преобразователей, в первом случае: - по результатам последовательных измерений в парах за полный круговой цикл, а во втором: - параллельно во всех парах, выделением фазовых характеристик, по измерениям, определяют плоскости линий пеленгов с привязкой к истинному нулю.
Для размещения классических круговых широкобазисных антенных систем, при использовании указанных способов с минимизацией ошибок определения пеленгов требуются большие площади однородных, с высокой проводимостью, земельных участков при критичном окружении переизлучающими объектами, влияющими на величины ошибок определения пеленгов.
Известен способ двухмерного моноимпульсного пеленгования источников радиоизлучений систем радиомониторинга по азимуту и углу места, обеспечиваемый за счет выбора конфигурации антенной системы из образующих N-элементную винтовую антенную решетку, при общем числе антенн не менее трех (Артемов М.Л., Афанасьев О.В., Сличенко М.П., Артемова Е.С. Способ двухмерного моноимпульсного пеленгования источников радиоизлучений. Патент RU №2696095 от 31.07.2019 МПК G01S 5/04). В данном способе антенны с пеленгаторами, размещенные, в том числе на беспилотных летательных аппаратах, участвуют в синхронном измерении комплексных амплитуд принятых радиосигналов. Находящиеся на одинаковом расстоянии вдоль винтовой линии - кривой, в трехмерном пространстве, расположенной на круглом вертикальном цилиндре, они обеспечивают проекциями сохранение расстояния между элементами вдоль горизонтальной плоскости, что должно обеспечивать высокую точность пеленгования в азимутальной плоскости.
Недостатками известного способа являются использование не менее трех беспилотных летательных аппаратов при минимальной точности, но и не учтенное влияние земли на разных высотах размещения антенн, увеличивающее ошибки определения пеленгов.
Наиболее близким по технической сущности является классический пеленгатор с антенной системой из одинаковых антенн, ориентированных по сторонам света, с базовыми расстояниями в парах между противоположными антеннами с разносом, большим λ. (Мезин В.К. Автоматические радиопеленгаторы. М. Изд-во «Советское радио». 1969 г., с. 105-111, рис. 3.1). В известном способе пары антенн, ориентированные С-Ю и В-З, подключены к каналам двухканальных приемных трактов, выходы которых подключены к фазометрам. Путем измерения разности фаз фазометрами, известным расчетным способом или с помощью специальных счетно-решающих устройств определяют азимут и угол места, для чего необходимы два приемоиндикатора и две системы одинаковых взаимно-перпендикулярных пар антенн или коммутация антенн на один приемоиндикатор.
Общим недостатком для всех фазовых пеленгаторов являются ошибки, связанные с неточностями размеров антенной системы. К недостаткам прототипа следует отнести неодинаковости подключающих кабелей, влияние местности и окружения, приема на протяженные горизонтальные соединительные проводники и не идентичности их нагрузок.
Целью изобретения является разработка нового способа с улучшенными технико-эксплуатационными характеристиками радиопеленгаторов, повышенной точностью определения пеленгов.
Поставленная цель достигается тем, что в известном способе пеленгования источника радиосигнала, заключающемся в приеме сигнала с помощью ненаправленных антенн, образующих жесткую антенную решетку при измерении разности фаз между радиосигналами, принятыми в парах антенн, перпендикулярно ориентированных и попарно подключенных к входам двухканальных приемных трактов, выходы которых подключены к фазометрам, заменяют парой мобильных диаметрально расположенных антенн в виртуальной круговой эквидистантной решетке, образованной методом перемещения антенн в пространстве по кругу беспилотными летательными аппаратами.
Разработка предлагаемого нового способа обеспечивает получение технического результата в расширении областей применения, уменьшении и компенсации ошибок в определении пеленга, сокращении до пары используемых антенн, применяемых для пеленгования, с эффективностью круговой антенной решетки из многочисленного набора антенн и возможностями реализации системы пеленгования с широкой базой без учета влияния на местности и окружения наземными переизлучателями, из-за размещения антенн на беспилотных летательных аппаратах, находящихся на удалении от земли.
Требуемый технический результат, при использовании изобретения, достигается тем, что способ пеленгования источника радиосигнала, заключающийся в приеме радиосигнала с помощью ненаправленных антенн, образующих антенную решетку, и измерении разности фаз между радиосигналами, принятыми в парах антенн, перпендикулярно ориентированных и попарно подключенных к входам двухканальных приемных трактов, с подключенными выходами к фазометрам, усовершенствован. Как и в прототипе, также измеряют разность фаз между радиосигналами, принятыми парой диаметрально расположенных антенн, но в виртуальной круговой эквидистантной решетке. Местоположение каждой в паре антенн, в реальном масштабе времени, определяется с помощью бортовой навигационной системы. Виртуальная круговая антенная решетка образуется методом перемещения в пространстве по кругу в параллельной земной поверхности плоскости пеленгования беспилотными летательными аппаратами, с установленными на них бортовыми ненаправленными антеннами бортовых радиопеленгаторов с двухканальными приемными трактами. При этом оба канала приемных трактов соединены входами каналов с бортовой ненаправленной антенной. Через введенные блоки приема-передачи пеленгуемых радиосигналов и сигналов управления, пеленгуемым радиосигналом второго из каналов каждого двухканального приемного тракта, после прохождения преселектора, радиосигнал перенаправляется для модуляции повышенной частоты в блок приема-передачи пеленгуемых радиосигналов и сигналов управления летательного аппарата с бортовым пеленгатором. Пеленгуемые радиосигналы с одного беспилотного летательного аппарата ретранслируются через блоки приема-передачи пеленгуемых радиосигналов и сигналов управления на другой летательный аппарат, где демодулируются и подаются во второй канал, двухканального приемного тракта, вместо перенаправленного радиосигнала для последующей обработки и измерения фазовыми измерителями, с исключением набега фазы в каналах ретрансляции. Управление бортовыми пеленгаторами осуществляется с наземного модуля управления и индикации, оборудованного поисковым командным радиоприемником для управления настройкой приемными трактами бортовых радиопеленгаторов и устройством индикации пеленгов, принятых от них через блок приема-передачи пеленгуемых радиосигналов и сигналов управления.
В соответствии с изобретением, в навигационных системах при использовании ГЛОНАСС/GPS вычислителей координат, при перемещении в пространстве по кругу, в параллельной земной поверхности плоскости пеленгования, реализуются функции ГЛОНАСС/GPS-компасов. Это обеспечивает на беспилотных летательных аппаратах, устройствами вычисления пеленга, непосредственное определение азимутов и углов места на источники радиосигналов и их последующую передачу через блоки приема-передачи пеленгуемых радиосигналов и сигналов управления в наземный модуль управления и индикации, для обработки результатов пеленгования.
Кроме этого, наземный модуль управления и индикации, оборудованный поисковым командным радиоприемным устройством, для управления настройкой приемными трактами бортовых радиопеленгаторов, с устройством индикации пеленгов, принятых через блок приема-передачи пеленгуемых радиосигналов и сигналов управления, дополнительно оборудуется навигационной системой и двухканальным приемным трактом радиопеленгатора наземного модуля управления и индикации. В его каналы, в обход преселекторов, перехватываются и подаются ретранслируемые между беспилотными летательными аппаратами, пеленгуемые радиосигналы с модуляцией ими повышенной частоты и после приема и демодуляции в блоке приема-передачи пеленгуемых радиосигналов и сигналов управления для последующей обработки и измерения фазовым измерителем. После исключения набега фаз, из-за ретрансляции радиосигналов между беспилотными летательными аппаратами и наземным модулем управления и индикации, при учете данных бортовых навигационных систем от каждого беспилотного летательного аппарата и навигационной системой наземного модуля управления и индикации обеспечивается определение дополнительных результатов пеленгования устройствами вычисления пеленга и уменьшения ошибок определения пеленгов.
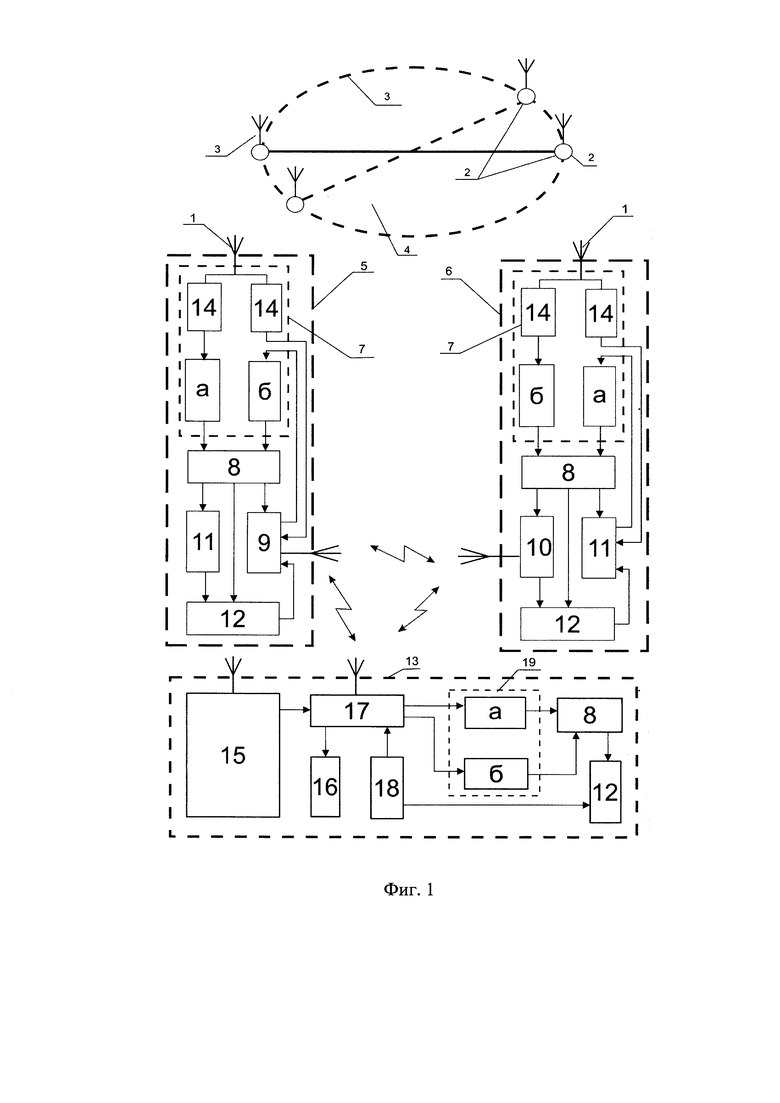
Заявленный способ поясняется иллюстрацией, представленной на фиг. 1. На фиг. 1 приняты следующие обозначения: 1 - бортовая ненаправленная антенна; 2 - виртуальная круговая эквидистантная решетка из антенн, образованная методом перемещения в пространстве по кругу беспилотными летательными аппаратами в параллельной земной поверхности плоскости пеленгования; 3 - круг, по которому перемещаются беспилотные летательные аппараты в плоскости пеленгования; 4 - параллельная земной поверхности плоскость пеленгования; 5, 6 - беспилотные летательные аппараты; 7 - бортовые радиопеленгаторы; 8 - фазовые измерители; 9, 10, 17 - блоки приема-передачи пеленгуемых радиосигналов и сигналов управления; 11, 18 - навигационные системы; 12 - устройства вычисления пеленга; 13 - наземный модуль управления и индикации пеленга; 14 - преселектор приемных каналов; 15 - поисковое командное радиоприемное устройство; 16 - устройство индикации пеленгов; 19 - приемный тракт радиопеленгатора наземного модуля управления и индикации пеленга.
Функционирование системы по способу пеленгования источника радиосигнала в соответствии с данным способом происходит следующим образом. С пункта запуска носителей поднимаются беспилотные летательные аппараты 5 и 6, с установленными на них бортовыми ненаправленными антеннами 1, бортовых радиопеленгаторов 7. В заданной с наземного модуля управления и индикации 13 точке координат, они начинают движение по кругу 3, соблюдая диаметральный разнос. За счет перемещения в пространстве в горизонтальной плоскости пеленгования 4, параллельной земной поверхности, образуется виртуальная круговая эквидистантная антенная решетка 2, последовательно обеспечивая нахождение в вертикальной плоскости пары разнесенных антенн 1 под разными углами к источнику радиосигнала. В частных случаях за каждый оборот эта плоскость может совпадать с направлением на источник радиосигнала и быть перпендикулярной направлению, когда обеспечивается максимальная точность определения пеленга. Бортовые радиопеленгаторы 7 беспилотных летательных аппаратов 5 и 6, содержащие двухканальные (а) и (б) приемные тракты, соединенные входами каналов с ненаправленной антенной 1, по командам с наземного модуля управления и индикации пеленга 13, одновременно осуществляют радиоприем радиосигналов. Их выходы соединены с фазовыми измерителями 8, с которых полученные данные поступают в устройства вычисления пеленга 12, куда поступают данные о местоположении, как своего носителя, так и другого, с учетом бортовых навигационных систем 11, в пеленгаторной паре ненаправленных антенн 1 беспилотных летательных аппаратов 5 и 6. В свою очередь, принимаемый радиосигнал с антенны 1 своего беспилотного летательного аппарата 5, после преселектора 14, канала (б) приемного тракта, через блоки приема-передачи пеленгуемых радиосигналов и сигналов управления 9 и 10 подается в канал (б) приемного тракта беспилотного летательного аппарата 6 и, наоборот, с 6 на 5. Для перенаправления радиосигналов ими осуществляется модуляция повышенной частоты в блоке приема-передачи пеленгуемых радиосигналов и сигналов управления на беспилотном летательном аппарате передачи и демодуляция на беспилотном летательном аппарате приема. При этом, в устройствах вычисления пеленга 12, с учетом набега фазы по вычисленному расстоянию между антеннами, полученному от бортовых навигационных систем 11, осуществляется определение пеленга и передача результата, через блок приема-передачи пеленгуемых радиосигналов и сигналов управления 9 и 10, на наземный модуль управления и индикации 13 для обработки результатов пеленгования, индикации и регистрации. В свою очередь, при нахождении плоскости размещения антенн 1 в створе с направлением на источник радиосигнала, по измеренной и расчетной разности фаз, с прохождением радиосигнал а по соединяющему антенны радиусу, вычисляется угол места на источник радиосигнала.
В соответствии с изобретением при использовании) в навигационных системах 11 ГЛОНАСС/GPS вычислителей координат, при перемещении в пространстве по кругу 3, в параллельной земной поверхности плоскости пеленгования 4, реализуются функции ГЛОНАСС/GPS-компасов. При движении беспилотного летательного аппарата и вычислении его мест в разных точках круга 3, с учетом траектории в пространстве, обеспечивается возможность определения пеленга с отсчетом от направления на север, то есть определение азимутов. Кроме этого, при пеленговании источника радиосигнала при одновременном использовании на обоих беспилотных летательных аппаратах в навигационных системах ГЛОНАСС/GPS вычислит глей координат, реализуется относительный способ определения разноса между антеннами, по местоопределению каждой, с подходом к дифференциальному, обеспечивающему ошибки разноса антенн в единицы сантиметров и снижающему ошибки определения пеленгов.
Управление приемными трактами пеленгаторов 7 на каждом беспилотном летательном аппарате 5 и 6, при настройке на частоту пеленгуемых сигналов, осуществляется от поискового командного радиоприемного устройства 15, наземного модуля управления и индикации 13. Полученные результаты через блок приема-передачи пеленгуемых радиосигналов и сигналов управления 17 отображаются устройством индикации пеленгов 16. Дополнительно к этому наземный модуль управления и индикации 13 оборудуется навигационной системой 18 и двухканальным приемным трактом радиопеленгатора 19. В его каналы, в обход преселекторов (на фиг. 1 не показаны), перехватываются и подаются ретранслируемые между беспилотными летательными аппаратами 5 и 6, пеленгуемые радиосигналы с модуляцией ими повышенной частоты и после приема и демодуляции в блоке приема-передачи пеленгуемых радиосигналов и сигналов управления 17, подаются для последующей обработки и измерения фазовым измерителем 8. После исключения набега фаз, из-за ретрансляции радиосигналов между беспилотными летательными аппаратами и наземным модулем управления и индикации, при учете данных бортовых навигационных систем 11 от каждого беспилотного летательного аппарата и навигационной системы 18 наземного модуля управления и индикации 13, осуществляется дополнительное определение результатов пеленгования устройством вычисления пеленга 12. В свою очередь данные с фазовых измерителей 8 могут быть переданы без участия в обработке устройства вычисления пеленга 12 непосредственно через блоки приема-передачи пеленгуемых радиосигналов и сигналов управления 9 и 10, на наземный модуль управления и индикации 13 для контрольной обработки результатов пеленгования, индикации и регистрации.
Таким образом, предлагаемый способ пеленгования источника радиосигнала, с использованием нестандартного применения фазовых двухканальных радиопеленгаторов, на современном уровне элементной базы позволяет осуществить комбинирование рассматриваемых устройств средств и фрагментов способов в едином способе.
Новизна в части способа по изобретению усматривается в том, что для пеленгования источника радиосигнала применяется круговая эквидистантная решетка, образованная методом перемещения в пространстве по кругу в параллельной земной поверхности плоскости пеленгования беспилотными летательными аппаратами, с установленными на них бортовыми ненаправленными антеннами бортовых радиопеленгаторов;
Новизна в части способа по изобретению усматривается в том, что при пеленговании источника радиосигнала, с использованием пары беспилотных летательных аппаратов, с установленными на них бортовыми ненаправленными антеннами бортовых радиопеленгаторов, определение пеленгов производится одновременно на обоих беспилотных летательных аппаратах с их передачей на наземный модуль управления и индикации для обработки результатов пеленгования;
Новизна в части способа по изобретению усматривается в том, что при пеленговании источника радиосигнала, с использованием пары беспилотных летательных аппаратов, при сравнении фаз пеленгуемых радиосигналов, принятых разнесенными антеннами, используются радиоканалы ретрансляции между беспилотными летательными аппаратами;
Новизна в части способа по изобретению усматривается в том, что при пеленговании источника радиосигнала, с использованием пары беспилотных летательных аппаратов, с установленными на них бортовыми ненаправленными антеннами бортовых радиопеленгаторов, определение пеленга дополнительно производится устройствами вычисления пеленга в наземном модуле управления и индикации на базе используемой в радиоканалах ретрансляции между беспилотными летательными аппаратами;
Новизна в части способа по изобретению усматривается в том, что при пеленговании источника радиосигнала, пеленгуемый радиосигнал, для ретрансляции между беспилотными летательными аппаратами, снимается с выходов преселекторов радиопеленгаторов;
Новизна в части способа по изобретению усматривается в том, что при пеленговании источника радиосигнала в целях сохранения фазовых характеристик в радиоканалах ретрансляции между беспилотными летательными аппаратами, используется модуляция повышенной частоты пеленгуемым радиосигналом;
Новизна в части способа по изобретению усматривается в том, что при пеленговании источника радиосигнала при использовании в навигационных системах ГЛОНАСС/GPS вычислителей координат, при перемещении в пространстве, реализуются функции ГЛОНАСС/GPS-компасов, обеспечивающих на беспилотных летательных аппаратах непосредственное определение азимутов и углов места на источники радиосигналов;
Новизна в части способа по изобретению усматривается в том, что при пеленговании источника радиосигнала, при одновременном использовании на обоих беспилотных летательных аппаратах в навигационных системах ГЛОНАСС/GPS вычислителей координат, реализуется относительный способ определения разноса между антеннами, по местоопределению каждой, с подходом к дифференциальному, обеспечивающий ошибки разноса антенн в единицы сантиметров и снижающий ошибки определения пеленгов;
Новизна в части способа по изобретению усматривается в том, что при пеленговании источника радиосигнала при одновременном использовании двух радиопеленгаторов и измерении двумя устройствами расстояния между ними, с усреднением обеспечивается повышение точности измерения разноса пеленгаторных антенн и определения пеленга.
Новизна в части способа по изобретению усматривается в том, что при развертывании системы для определения пеленга на источник радиосигнала по предлагаемому способу пеленгования источника радиосигнала, не требуется нивелировки местности и юстировки антенн по месту использования, что повышает технико-эксплуатационные характеристики относительно прототипа и широко применяемых известных способов, в том числе и мобильных.
Новизна в части способа по изобретению усматривается в том, что при развертывании системы для определения пеленга на источник радиосигнала по предлагаемому способу пеленгования источника радиосигнала обеспечивается возможность дезинформации дислокации наземного модуля управления и индикации для обработки результатов пеленгования, индикации и регистрации при увеличенном удалении беспилотных летательных аппаратов от места нахождения модуля.
Сочетание отличительных признаков и свойств как в заявленном способе пеленгования источника радиосигнала из технической, научной литературы и патентной документации не выявлено, поэтому оно соответствует критериям новизны и изобретательского уровня.
Промышленная применимость заявленного способа пеленгования источника радиосигнала усматривается в расширенной известности назначения заявленного способа и осуществимости с помощью известных устройств, средств и фрагментов способов, комплексно использующихся в предлагаемом техническом решении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
| РАДИОПЕЛЕНГАТОР С ПОДАВЛЕНИЕМ МОДУЛЯЦИОННЫХ ОШИБОК ПЕЛЕНГОВАНИЯ | 2004 |
|
RU2267135C2 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1999 |
|
RU2144200C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В ЛОКАЛЬНОМ РАЙОНЕ | 2021 |
|
RU2781685C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| Способ и устройство противодействия беспилотным летательным аппаратам | 2023 |
|
RU2818398C1 |
Изобретение относится к области радиотехники и может использоваться в мобильных комплексах и резервным дополнением к стационарным системам радиоразведки и радиоконтроля, радионавигации и радиомониторинга для определения направления на источник излучения или углов прихода радиоволн, преимущественно в декаметровом диапазоне длин радиоволн. Технический результат изобретения заключается в расширении областей применения, уменьшении и компенсации ошибок в определении пеленга, сокращении до пары используемых антенн, применяемых для пеленгования, с эффективностью круговой антенной решетки из многочисленного набора антенн и возможностями реализации системы пеленгования с широкой базой, без учета влияния местности и окружения наземными переизлучателями. Указанный результат достигается за счет использования фазового метода при размещении антенн на беспилотных летательных аппаратах, находящихся на удалении от земли, введенными блоками приема-передачи пеленгуемых радиосигналов и сигналов управления, ретранслирующих пеленгуемые сигналы между беспилотными летательными аппаратами, бортовых навигационных системам и наземного модуля управления и индикации для обработки массива результатов пеленгования, индикации и регистрации. 2 з.п. ф-лы, 1 ил.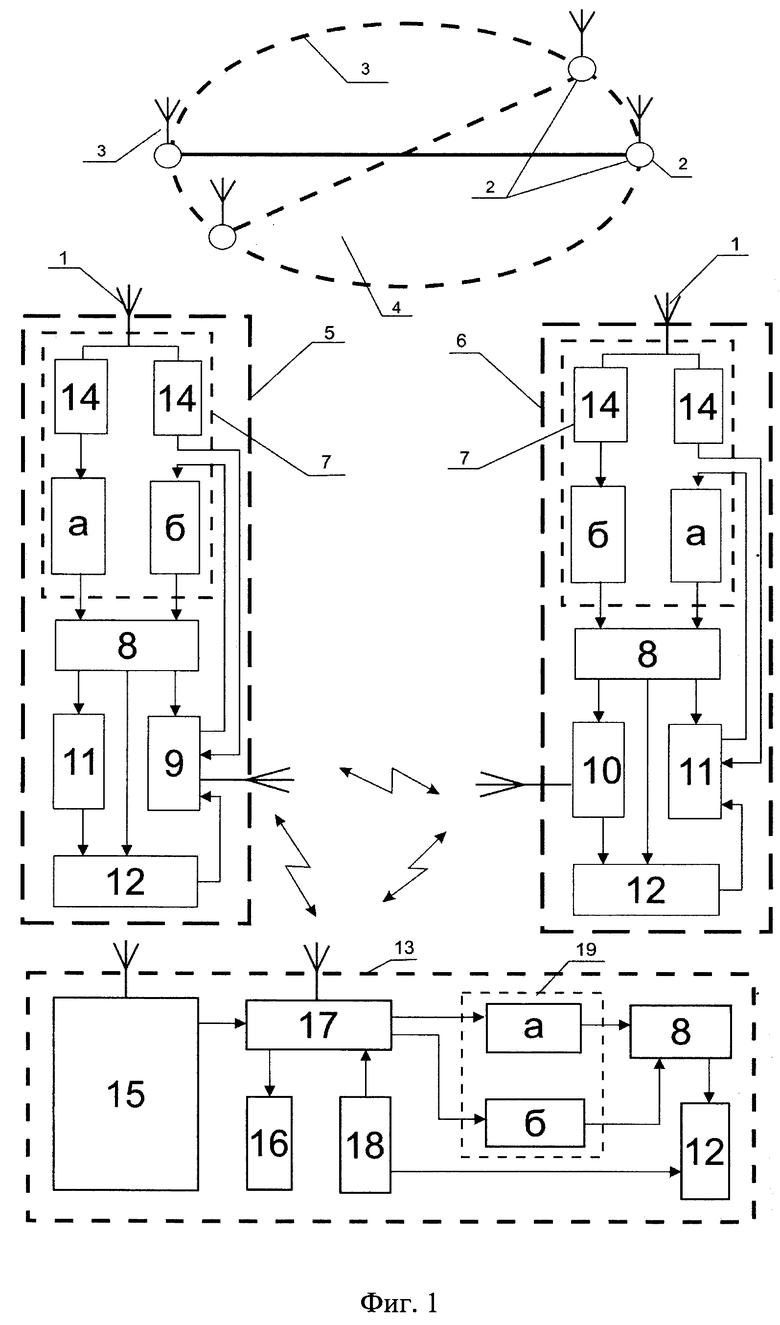
1. Способ пеленгования источника радиосигнала, основанный на приеме сигнала с помощью ненаправленных антенн, образующих антенную решетку, и измерении разности фаз между сигналами, принятыми в парах антенн, перпендикулярно ориентированных и попарно подключенных к входам двухканальных приемных трактов, выходы которых подключены к фазометрам, отличающийся тем, что измеряют разность фаз между сигналами, принятыми парой диаметрально расположенных антенн в виртуальной круговой эквидистантной решетке, образованной методом перемещения в пространстве по кругу в параллельной земной поверхности плоскости пеленгования беспилотными летательными аппаратами с установленными на них бортовыми ненаправленными антеннами бортовых радиопеленгаторов с двухканальными (а и б) приемными трактами, соединенными входами каналов с ненаправленной антенной, фазовыми измерителями, блоками приема-передачи пеленгуемых радиосигналов и сигналов управления, бортовыми навигационными системами, устройствами вычисления пеленга и наземным модулем управления и индикации пеленга, причем настройка на частоту бортовых радиопеленгаторов на пеленгуемый источник радиосигнала производится наземным модулем управления и индикации пеленга от поискового командного радиоприемного устройства через блоки приема-передачи пеленгуемых радиосигналов и сигналов управления, при этом пеленгуемым радиосигналом второго из каналов (б) каждого двухканального приемного тракта после прохождения преселектора в двухканальном приемном тракте радиосигнал перенаправляется для модуляции повышенной частоты в блок приема-передачи пеленгуемых радиосигналов и сигналов управления летательного аппарата приема, ретранслируется в блок приема-передачи пеленгуемых радиосигналов и сигналов управления другого летательного аппарата, где демодулируется и подается во второй канал (б), двухканального приемного тракта вместо перенаправленного радиосигнала для последующей обработки и измерения фазовыми измерителями, с исключением набега фаз из-за ретрансляции радиосигналов между беспилотными летательными аппаратами, определения результатов устройствами вычисления пеленга, при учете данных бортовых навигационных систем на каждом беспилотном летательном аппарате и передачей на наземный модуль управления и индикации для обработки результатов пеленгования, индикаций и регистрации.
2. Способ пеленгования по п. 1, отличающийся тем, что в навигационных системах используются ГЛОНАСС/GPS вычислители координат, причем при перемещении в пространстве по кругу в параллельной земной поверхности плоскости пеленгования реализуются функции ГЛОНАСС/GPS-компасов, обеспечивающих на беспилотных летательных аппаратах, устройствами вычисления пеленга, непосредственное определение азимутов и углов места на источники радиосигналов и их последующую передачу через блоки приема-передачи пеленгуемых радиосигналов и сигналов управления в наземный модуль управления и индикации для обработки результатов пеленгования, индикации и регистрации.
3. Способ пеленгования по п. 1, отличающийся тем, что наземный модуль управления и индикации, оборудованный поисковым командным радиоприемным устройством для управления настройкой приемными трактами бортовых радиопеленгаторов с устройством индикации пеленгов, принятых через блок приема-передачи пеленгуемых радиосигналов и сигналов управления, дополнительно оборудован навигационной системой и двухканальным (а и б) приемным трактом радиопеленгатора наземного модуля управления и индикации, в каналы которого, в обход преселекторов, подаются ретранслируемые между беспилотными летательными аппаратами, пеленгуемые радиосигналы с модуляцией ими повышенной частоты и после приема и демодуляции в блоке приема-передачи пеленгуемых радиосигналов и сигналов управления для последующей обработки и измерения фазовым измерителем с исключением набега фаз из-за ретрансляции сигналов между беспилотными летательными аппаратами и наземным модулем управления и индикации для определения результатов устройствами вычисления пеленга при учете данных бортовых навигационных систем на каждом беспилотном летательном аппарате и навигационной системой наземного модуля управления и индикации.
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР РАДИОСИГНАЛОВ | 2003 |
|
RU2267134C2 |
| Способ однозначного определения пеленга для двухканального радиопеленгатора и устройство для его осуществления | 1983 |
|
SU1108375A1 |
| US 5030959 A, 1991.07.09 | |||
| US 3824596 A, 1974.07.16 | |||
| МИЛКИН В.И., ЛИВЕРКО А.А | |||
| Мультифазометрический способ определения направления на источник радиоизлучения, Научное приборостроение, Т.10, N2, 2000. | |||

