Изобретение относится к гидроавтоматике и может быть использовано для определения перекрытий дроссельных щелей распределительных каскадов гидроусилителей.
Известен способ контроля дроссельных каскадов гидроусилителя, заключающийся в том, что перемещают подвижный элемент гидроусилителя и измеряют давление в выходных каналах гидроусилителя и эталонного дросселя и по величине наблюдаемых сигналов определяют характеристики дроссельных каскадов 1.
Недостатки данного способа - низкие быстродействие и точность из-за необходимости использования специального стенда с эталонным дросселем.
Известен также способ контроля .дроссельных каскадов гидроусилителя, заключающийся в том, что формируют на входе гидроусилителя контрольный гармонический сигнал и одновременно измеряют давление рабочей жидкости и перемещение подвижного элемента гидроусилителя и по форме наблюдаемых сигналов определяют характеристики дроссельных каскадов 2.
Недостатками известного способа являются низкие быстродействие и точность из-за отсутствия возмозности определения перекрытий дроссельных щелей в процессе одного испытания.
Цель изобретения - повыщение быстродействия и точности.
Для достижения поставленной цели согласно способу контроля дроссельных каскадов гидроусилителя, заключающемуся в в том, что формируют на входе управляющего каскада контрольный гармонический сигнал и одновременно измеряют давление рабочей жидкости и перемещение подвижного элемента гидроусилителя и по форме наблюдаемых сигналов определяют характеристики дроссельных каскадов, измеряют значение амплитуды первой гармоники перемещения подвижного элемента, а также значения амплитуды и фазы первой и второй гармоник давления в выходных каналах и по значению амплитуды первой гармоники перемещения определяют величину и знак перекрытия дроссельных щелей, а по значениям амплитуды и фазы и знаку фазы гармоник давления судят о соотнощении перекрытий напорных и сливных дроссельных щелей.
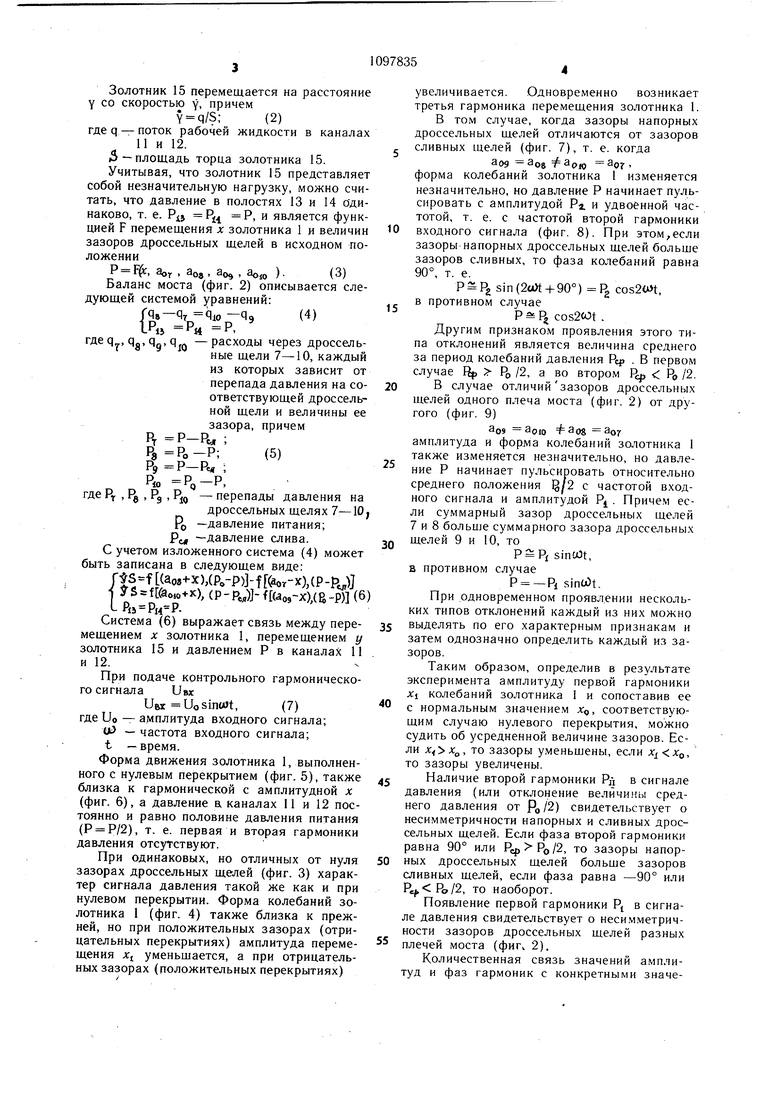
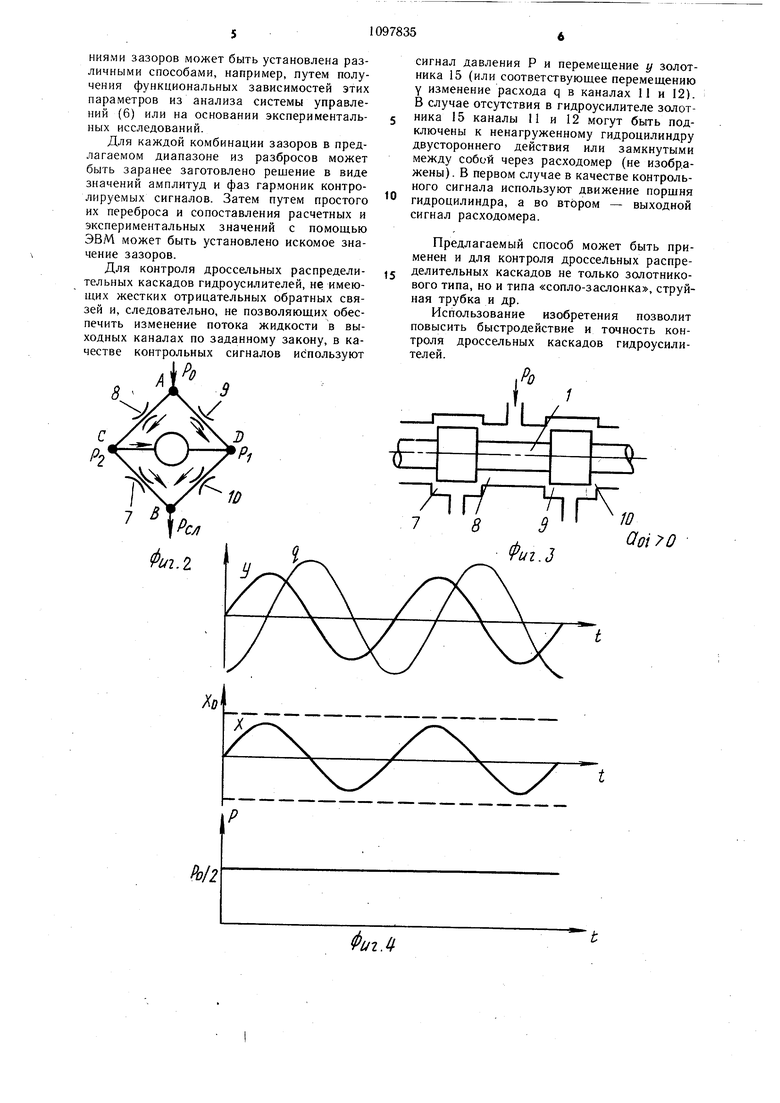
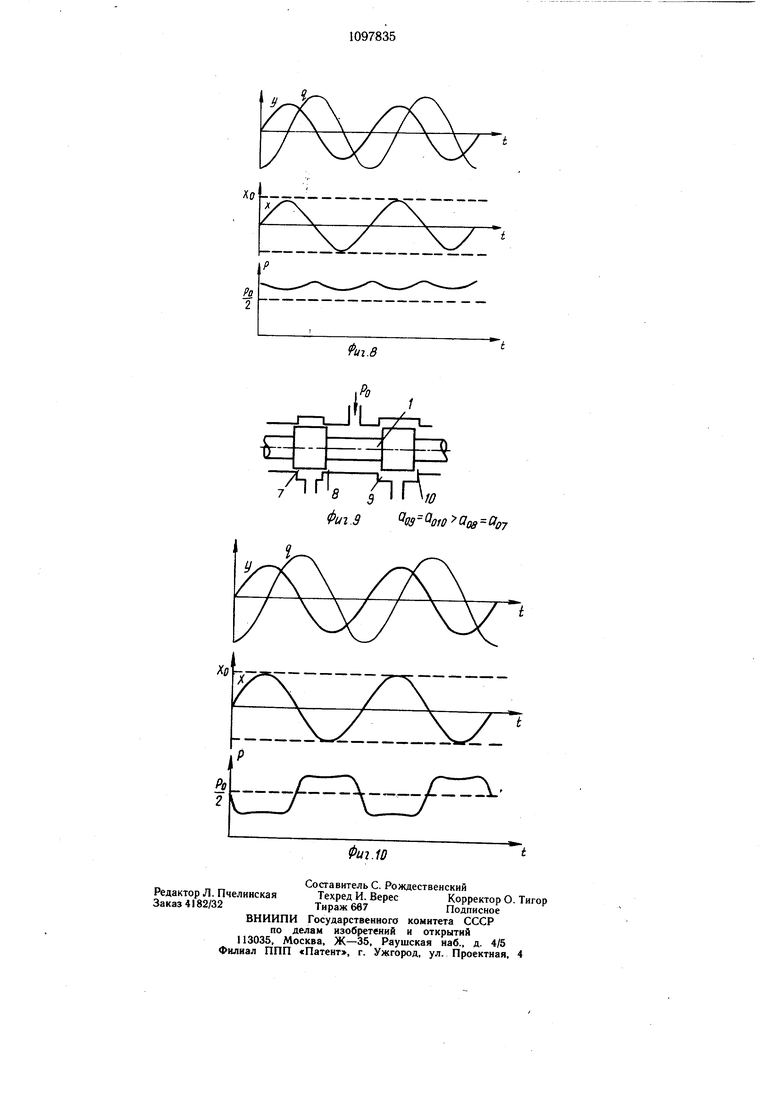
На фиг. 1 изображена конструктивная схема гидроусилителя; на фиг. 2 - схема гидравлического моста гидроусилителя; на фиг. 3 и 4 - соответственно исходное положение поясков подвижного элемента гидроусилителя относительно проточек корпуса и формы наблюдаемых сигналов при отрицательном перекрытии дроссельных щелей; на фиг. 5 и 6 - соответственно исходное положение поясков и формы наблюдаемых сигналов при нулевом перекрытии дроссельных щелей; на фиг. 7 и 8 - соответственно исходное положение поясков при несимметричном отрицательном перекрытии дроссельных щелей; на фиг. 9 и 10 - соответственно исходное положение поясков и формы наблюдаемых сигналов при несимметричном положительном и отрицательном выполнении перекрытий дроссельных щелей.,
Гидроусилитель содержит управляющий каскад с подвижным элементом, выполненным в виде золотника 1, пояски 2 и 3 которого образуют с проточками 4 и 5 корпуса 6 дроссельные щели 7-10. Выходные
5 каналы 11 и 12 золотника 1 подключены к полостям 13 и 14 управления золотника 15 управляемого каскада, выходные каналы 16 и 17 которого при контроле золотника 1 перекрыты. Датчик 18 служит для измерения перемещения золотника 1, датчик 19 -
0 для измерения перемещения золотника 15, датчик 20 - для измерения давления рабочей жидкости в выходных каналах.
Для приведения в движение золотника 1 служит электромеханический преобразователь 21, подключенный к выходу сравнивающего усилия 22, связанного входами с датчиком 19 и задающим блоком (не показан). Электронное устройство 23, связанное с датчиками 18 и 20, служит для измерения значений амплитуды первой гармоники пере0 мещения золотника 1 и значений амплитуды и фазы первой и второй гармоник давления, т. е. для осуществления гармонического анализа сигналов перемещения и давления.
Способ осуществляется следующим образом.
5На вход электромеханического преобразователя 21 подают контрольный сигнал гармонической формы, в соответствии с которым обеспечивается движение золотника 15. При этом устройством 23 измеряются значения амплитуды первой гармоники перемещения золотника 1 и значения амплитуды и фазы первой и второй гармоник давления.
Величины зазоров (величина противоположная перекрытию) дроссельных щелей влияют на формы сигналов, измеряемых датчиками 18-20 и устройствами 23.
В процессе отработки контрольного сигнала текущая величина зазора каждой из дроссельных щелей 7-10 определяется величиной зазора в исходном положении и перемещением золотника 1, т. е. aj аи ±х,(1)
где а - текущая величина зазора дроссельной щели (аг, а, а,, а,о); aoj-величина зазора дроссельной щели в исходном положении (ад , aoj, Зоз Зо|( );
X -перемещение золотника 1; i -обозначение дроссельной щели. Золотник 15 перемещается на расстояние у со скоростью Y, причем Y q/S;(2) где q - поток рабочей жидкости в каналах 11 и 12. |5 - площадь торца золотника 15. Учитывая, что золотник 15 представляет собой незначительную нагрузку, можно считать, что давление в полостях 13 и 14 одинаково, т. е. Pi4 Р, и является функцией F перемещения х. золотника 1 и величин зазоров дроссельных щелей в исходном положенииР р, аог , ао8. Зоэ , аоад )(3) Баланс моста (фиг. 2) описывается следующей системой уравнений: ГЧв-Чт 410 -Чэ( Pl4 Р, гдея , q, qg, -расходы через дроссельные щели 7-10, каждый из которых зависит от перепада давления на соответствующей дроссельной щели и величины ее зазора, причем РТ Р-Р„ ; РЗ РО-Р;(5) ; РЮ РО-Р, где РТ , Р , Рд , PJQ - перепады давления на дроссельных щелях 1--10 РО -давление питания; PJJ, -давление слива. С учетом изложенного система (4) может быть записана в следующем виде: (aoe+x),(p,-p)),(P-P) (ao.o-bx), (Р-Ре -Яйо9-х)ДВ-р) (6 L . Система (6) выражает связь между перемещением х золотника 1, перемещением у золотника 15 и давлением Р в каналах 11 и 12. При подаче контрольного гармонического сигнала UBX Uer UoSina)t,(7) где Uo - амплитуда входного сигнала; u - частота входного сигнала; t -время. Форма движения золотника 1, выполненного с нулевым перекрытием (фиг. 5), также близка к гармонической с амплитудной х, (фиг. 6), а давление а каналах II и 12 постоянно и равно половине давления питания (Р Р/2), т. е. первая и вторая гармоники давления отсутствуют. При одинаковых, но отличных от нуля зазорах дроссельных щелей (фиг. 3) характер сигнала давления такой же как и при нулевом перекрытии. Форма колебаний золотника 1 (фиг. 4) также близка к прежней, но при положительных зазорах (отрицательных перекрытиях) амплитуда перемещения Kf уменьшается, а при отрицательных зазорах (положительных перекрытиях) увеличивается. Одновременно возникает третья гармоника перемещения золотника 1. В том случае, когда зазоры напорных дроссельных щелей отличаются от зазоров сливных щелей (фиг. 7), т. е. когда ао9 ао8 f Зовд Qf , форма колебаний золотника 1 изменяется незначительно, но давление Р начинает пульсировать с амплитудой Pi и удвоенной частотой, т. е. с частотой второй гармоники входного сигнала (фиг. 8). При этом,если зазоры напорных дроссельных щелей больше зазоров сливных, то фаза колебаний равна 90°, т. е. Р Р2 sin( + 90°) Р cos20i t, в противном случае P P2COs2Wt. Другим признаком проявления этого типа отклонений является величина среднего за период колебаний давления Ptp . В первом случае % Я /2, а во втором 1 РО 12. В случае отличийзазоров дроссельных щелей одного плеча моста (фиг. 2) от другого (фиг. 9) ао9 арщ aog ао7 амплитуда и форма колебаний золотника 1 также изменяется незначительно, но давление Р начинает пульсировать относительно среднего положения lg/2 с частотой входного сигнала и амплитудой Р . Причем если суммарный зазор дроссельных щелей 7 и 8 больше суммарного зазора дроссельных щелей 9 и 10, то P PI sincot, в противном случае Р -PI sin(j)t. При одновременном проявлении нескольких типов отклонений каждый из них можно выделять по его характерным признакам и затем однозначно определить каждый из зазоров. Таким образом, определив в результате эксперимента амплитуду первой гармоники xi колебаний золотника I и сопоставив ее с нормальным значением лгд, соответствующим случаю нулевого перекрытия, можно судить об усредненной величине зазоров. Если .: XQ, то зазоры уменьщены, если л Хо, то зазоры увеличены. Наличие второй гармоники Рд в сигнале давления (или отклонение величины среднего давления от Р /2) свидетельствует о несимметричности напорных и сливных дроссельных щелей. Если фаза второй гармоники равна 90° или , то зазоры напорных дроссельных щелей больше зазоров сливных щелей, если фаза равна -90° или , то наоборот. Появление первой гармоники Р в сигнае давления свидетельствует о несимметричности зазоров дроссельных щелей разных плечей моста (фиг 2). Количественная связь значений амплиуд и фаз гармоник с конкретными значеПИЯМИ зазоров может быть установлена различными способами, например, путем получения функциональных зависимостей этих параметров из анализа системы управлений (6) или на основании экспериментальных исследований. Для каждой комбинации зазоров в предлагаемом диапазоне из разбросов может быть заранее заготовлено решение в виде значений амплитуд и фаз гармоник контролируемых сигналов. Затем путем простого их переброса и сопоставления расчетных и экспериментальных значений с помощью ЭВМ может быть установлено искомое значение зазоров. Для контроля дроссельных распределительных каскадов гидроусилителей, не имеющих жестких отрицательных обратных связей и, следовательно, не позволяющих обеспечить изменение потока жидкости в выходных каналах по заданному закону, в качестве контрольных сигналов используют сигнал давления Р и перемещение у золотника 15 (или соответствующее перемещению Y изменение расхода q в каналах 11 и 12). В случае отсутствия в гидроусилителе золотника 15 каналы 11 и 12 могут быть подключены к ненагруженному гидроцилиндру двустороннего действия или замкнутыми между собой через расходомер (не изображены). В первом случае в качестве контрольного сигнала используют движение поршня гидроцилиндра, а во втором - выходной сигнал расходомера. Предлагаемый способ может быть применен и для контроля дроссельных распределительных каскадов не только золотникового типа, но и типа «сопло-заслонка, струйная трубка и др. Использование изобретения позволит повысить быстродействие и точность контроля дроссельных каскадов гидроусилителей. ULy QЕTirf .Фиг.З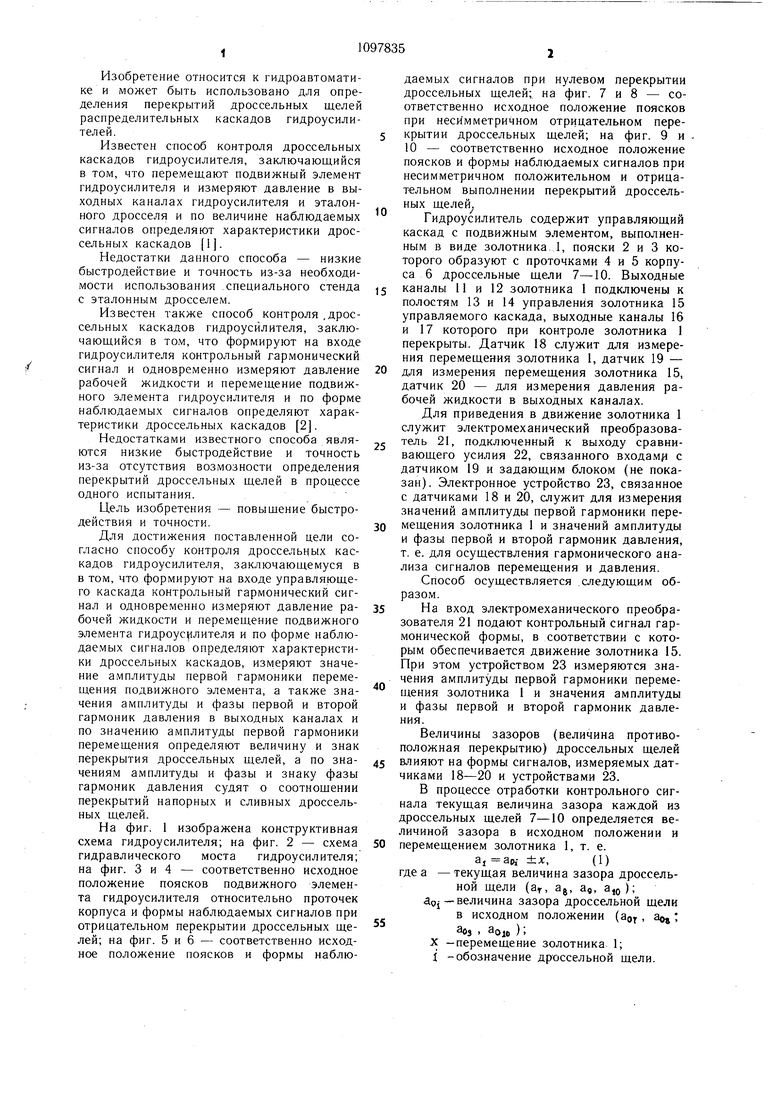
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| Стенд для испытания блока цилиндров двигателя внутреннего сгорания на усталость | 1984 |
|
SU1268985A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| Электрогидравлический усилитель | 1986 |
|
SU1333872A1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909359A1 |
| Электрогидравлический усилитель мощности | 1990 |
|
SU1712678A1 |
| ПРОПОРЦИОНАЛЬНЫЙ КЛАПАН УПРАВЛЕНИЯ ФРИКЦИОНАМИ ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧИ | 2016 |
|
RU2624926C1 |
| Гидроусилитель | 1980 |
|
SU928087A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
СПОСОБ КОНТРОЛЯ ДРОССЕЛЬНЫХ КАСКАДОВ ГИДРОУСИЛИТЕЛЯ, заключающийся в том, что формируют на входе гидроусилителя контрольный гармонический сигнал и одновременно измеряют давление рабочей жидкости и перемещение подвижного элемента гидроусилителя и по форме наблюдаемых сигналов определяют характеристики дроссельных каскадов, отличающийся тем, что, с целью повыщения бь1стродействня и точности, измеряют значение амплитуды первой гармоники перемещения подвижного элемента, а также значения амплитуды и фазы первой и второй гармоник давления в выходных каналах и по значению амплитуды первой гармоники перемещения определяют величчину и знак перекрытия дроссельных щелей, а по значениям амплитуды и фазы и знаку фазы гармоник давления судят о соотношении перекрытий напорных и сливных дроссельных щелей.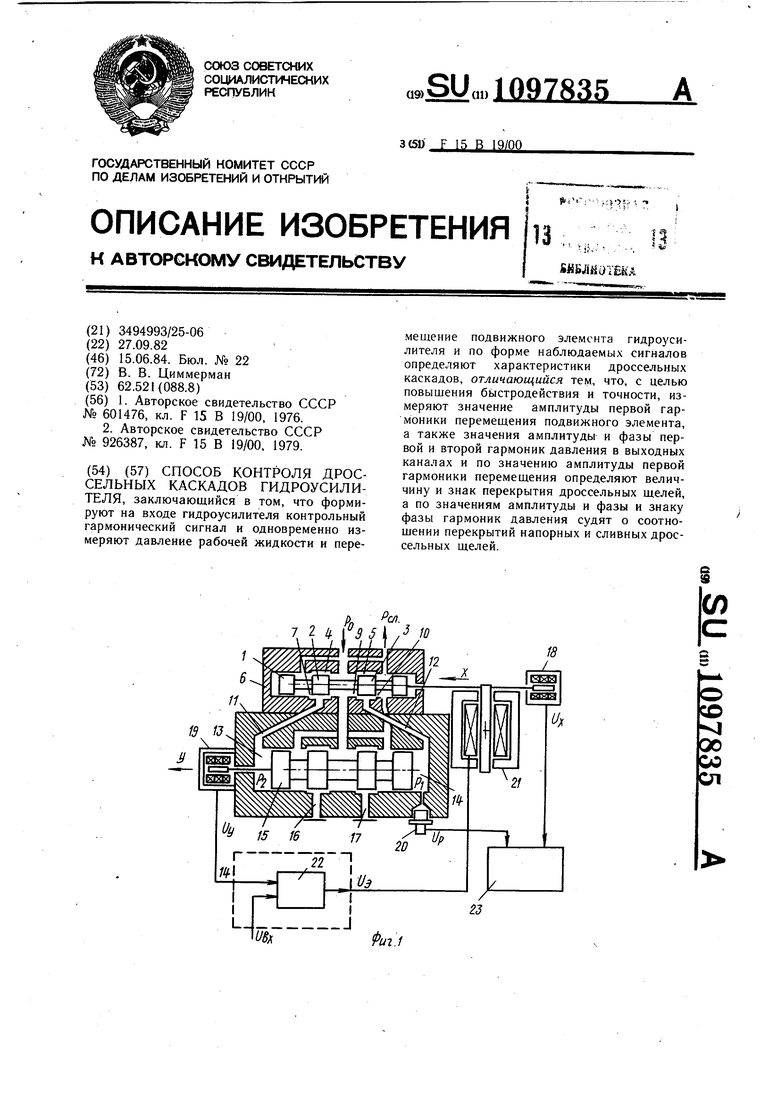
ФигЛ
Г
е
Г
в 3 Фиг.5
0 ;
3Got-О
0
Фиг.
Г
7Ь|/-Tir
.7
Т
/Z7
4Y/ v
7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Установка для контроля гидравлических распределителей | 1976 |
|
SU601476A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ определения гидродинамических характеристик электрогидравлических золотниковых усилителей | 1979 |
|
SU926387A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
