| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для циклового программного управления | 1981 |
|
SU1003019A1 |
| Цикловая система программного управления манипулятором | 1990 |
|
SU1812100A1 |
| Устройство для управления автоматической сменой заготовок на токарных станках с числовым программным управлением | 1985 |
|
SU1275374A1 |
| Устройство для выделения маркера кадровой синхронизации | 1989 |
|
SU1663775A1 |
| Устройство для циклового программного управления | 1988 |
|
SU1508193A1 |
| Устройство для программного управления | 1982 |
|
SU1083159A1 |
| Устройство для программного управления | 1981 |
|
SU1003020A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство для управления манипулятором | 1982 |
|
SU1041986A1 |
| Система для управления робототехнологическим комплексом | 1987 |
|
SU1413599A1 |
ЦИКЛОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МАЙИПУЛЯТОРОМ, содержащая последовательно соединенные коммутатор .кадров, программный блок, блок исполнительных элементов, блок датчиков и логический блок, второй вход которого соединен с выходом программного блока, отличающаяс я тем, что, с целью повышения надежности системы, она содержит формирователь импульсов, вход которого соединен с выходом логического,блока, а выход - с входом коммутатора кадров.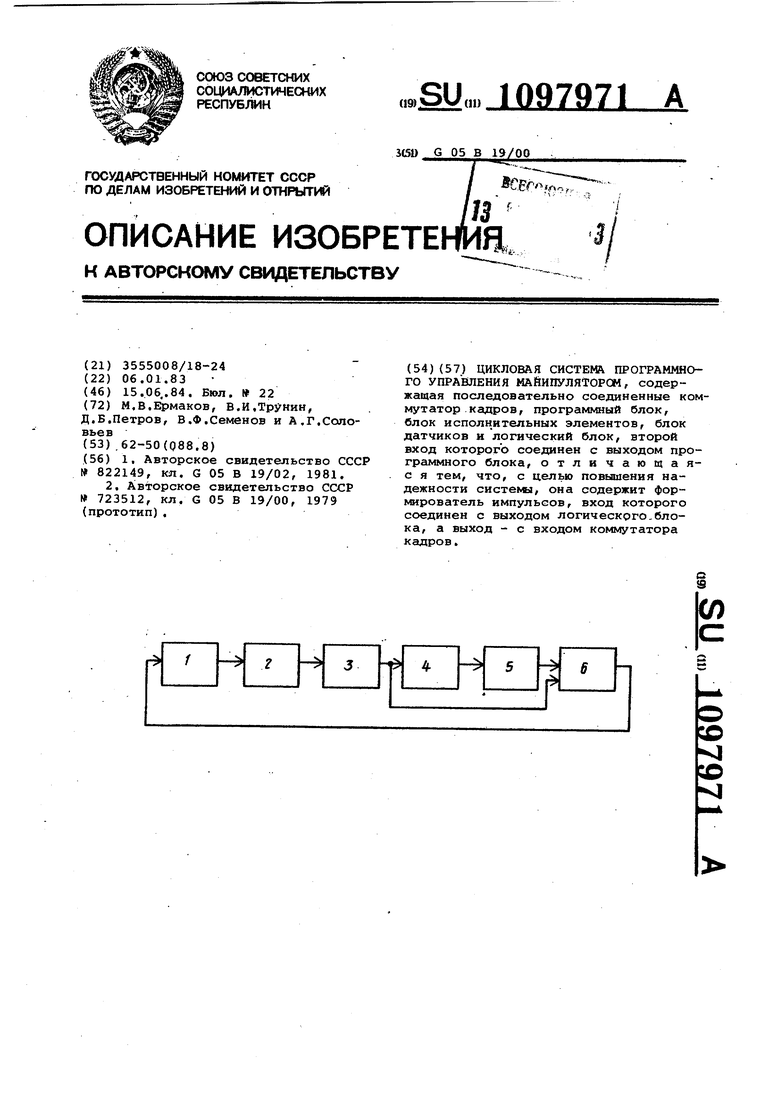
;о со
-4J
Изобретение относится к робототехнике и может быть использовано при создании цикловых систем программного управления манипуляторами различного назначения.
Известна цикловая система управле ния манипулятором, содержащая блок сигнализации, блок защиты, блоки контроля, формирователь импульсов, датчики срабатывания исполнительного органа, триггеры и элементы И и ИЛИ
Недостаток данной системы - возможность создания аварийных ситуаций при работе манипулятора.
Наиболее близкой к изобретению является система,содержащая последЬвательно соединеаные коммутатор кгщров, программный блок, блок исполни.тельных элементов, блок датчиков и логический блок, второй выход которого соединен с выходом программного блока 2
Однако известная система не обеспечивает контроль преждевременного срабатывания датчиков выполнения команд, что снижает надежность работы систе1«ы.
Цель изобретения - повышение надежности систеьи,
В систему, содержащую последовательно соединенные коммутатор кадров,программный блок, блок исполнительных элементов, блок датчиков и логический блок, второй вход которого соеди ен с выходом программного блока, введен формирователь импульсов, вход которого соединен с выходом логического блока, а выход - с входом коммутатора кадров.
На чертеже представлена функциональная схема CHCTeNW.
Схема включает формирователь импульсов 1, коммутатор 2 кадров, программный блок 3, блок 4 исполнительных элементов, блок 5 датчиков, логический блок б.
Устройство работает следующим образом.
В исходном состоянии выходным сигналом логического блока 6 является уровень логической единицы, Тогда при выполнении команды кадра выходным сигналом логического блока б является уровень логического поля. При этом коммутатор 2 кадров переключается на следующий кадр по перепаду выходного сигнала логического блока 6 из состояния логической единицы в состояние логического нуля, т.е. по отрицательному ФЕюнту сигнала логического блока б.
В момент времени-to коммутатор 2 кадров устанавливается на первый кгдр nporpaMNfai, например, сигналом исходной установки по включению питания. Программный блок 3 выдает соответствующую первому кадру команду на блок 4 исполнительных элементов.
При исправности исполнительного элемента, соответствующего команде первого кадра, и исправности контролирующего его датчика на выходе логи ческого блока б устанавливается уровень логической единицы. Через не- . которое время, необходимое для выполнения исправным исполнительным элементом блока 4 команды, в момент времени t, срабатывает соответствую 1и«й датчик блока 5 датчиков и на выходе логического блока 6 появляется уровень логического нуля.
Перепад сигнеша логического блока б из состояния логической единицы в состояние логического нуля (передний фронт сигнала логического блока б) передается формирователем 1 на вход коммутатора 2 кадров без задержки и переключает его на второй кадр программа . После переключения коммутатора 2 кадров на второй кадр программы на выходе логического блока б при исправности датчика блока 5 выполнения команда, второго кадра появляется уровень логической единицы. Формирователь 1 задерживает задний фронт синала логического блока б на заданное время, меньшее нормального времени выполнения любой команды. Соответственно несколько раньше времени нормального выполнения команды второго кадра при исправности соответствующего датчика формирователь 1 восстанавливается, т.е. на выходе формирователя 1 появляется уровень логической единицы (момент времени t +2 ) .
Через некоторое время с начала втрого кадра, необходимое для выполнения исправным исполнительным элементом блока 4 команды, в момент времени tj, срабатывает соответствующий исправный датчик блока 5 датчиков и на выходе логического блока б появляется уровень логического нуля. Передний фронт сигнала логического блока б передается формирователем 1 , на вход коммутатора 2 кадров и переключает его на третий кадр программы
Далее процесс работы продолжается аналогично вьвяеописанному.
В аварийной ситуации, например, при формировании программным блоком б команды четвертого кадра в момент времени,Ь происходит преждевременное срабатывание соответствующего датчика блока 5, обусловленное неисправностью исполнительного элемента блока 4 или самого датчика. Тогда на выходе логического блока 6 появляется уровень логаческого нуля, но так как формирователь 1 еще не восстановился (восстановление формирователя 1 может произойти в момент времени tj t4),отрицательный фронт
310979714
сигнала логического блока 6 не из-дом из с.троя датчиков выполнения коменяет состояния формирователя 1. Вманд (когда датчик дает информацию
результатекоммутатор 2 кадров не .о выполнении кдманды, хотя она еИе
переключается на следующий кадр и от-не выполнена) , как до момента подачи
работка программ; прекращается.команды, так и во время подачи команПрименение изобретения позволитпозволяет повысить надежность систеисключить возможность создания ава-кы циклового программного управления
рийных ситуаций, обусловленных выхо-манипулятором.
5ды на исполнительный механизм, что
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многоканальное устройство дляупРАВлЕНия Об'ЕКТОМ | 1979 |
|
SU822149A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цикловая система программного управления манипулятором | 1978 |
|
SU723512A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
