тельно подсоединенные четвертый .cyi iaTop и второй усилитель, вход которого подключен к второму входу третьего сумматора, первым входом соединенного с входом первого усилителя, выход которого подключен к первому выходу блока управления,второй выход которого соединен с выходом второго усилителя, третий и четвертый выходы - с первым и.вторым выходами блока циклового управления
соответственно, первый вход - с вторым входом второго сумматора) второй вход - с вторым входом четвертого сумматора, третий вход - с вторым входом блока циклового управления, четвертый вход - с третьим входом
блока циклового управления и первым входом элемента ЗАПРЕТ, пятый вход с вторым входом элемента ЗАПРЕТ, а
шестой -вход - с вторым входом четвертого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Устройство для управления схватом манипулятора | 1980 |
|
SU949628A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ И ЛИНЕЙНО ПЕРЕМЕЩАЕМЫМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОСНОВАНИЕМ | 2022 |
|
RU2794082C1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Устройство для управления роботом технологического конвейера | 1980 |
|
SU1096609A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2022 |
|
RU2821977C2 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ, содержащее блок ввода .сигнала, тахогенератор и световой указатель, первый и второй выходы которого соединены с соответствующими входами блока определения координат объекта rto положению светового указателя, а также блок- управления первым выходом подключенный к входу первого привода, связанного с первым датчиком положения, выход которого соединен с первым входом блока управления, вторым выходом подключенного к .входу второго привода, связанного с вторым датчиком положения , выход которого соединен с вторым входом блока управления, третьим и четвертым выходом Лодклвоченного соответственно к первому и второму входам третьего приводу, i связанного с первым и вторым датчиками конечного положения, выхода кото-. рых соединены соответственно с треть им и четвертым входами .блока управления, отличающееся тем, что, с целью расширения функциональ7 ных возможностей устройства, оио со держит реверсивный счетчик, первый и второй кольцевые регистры сдвига и буферные регистры, первый и второй входы каждого из которых соединены с соответствующими выходс1ми первого v и второго кольцевого регистра сдви- , га, третий и. четвертый входы - с первым и вторым выходами блока определения координат объекта по положению светового указателя соответственно, пятый вход - с выходом тахогенератора, а первый и второй выходы - с пятым и шестым входами блока .управления соответственно, выход второго датчика конечного положения подключен к входу первого кольцево- . го регистра сдвига и первому входу реверсивного счетчика, вторым входом соединенного с выходом блока ввода сигнала и входом второго кольцевого регистра сдвига. 2. Устройство по п. 1, отличающееся тем, что каждый бу(Л ферный регистр содержит интегратор, последовательно соединенные первый :элемент выборки и хранения, первый сумматор и первый ключ и последовательно подсоединенные второй элемент выборки и хранения и второй ключ, второй вход которого, а такжеГ второй вход первого ключа подключены к первому входу буферного регистра, вторым входом соединенного с первым входом первого и второго элемента .выборки и хранения и интегратора, со выход которого подключён к второму сх входу первого сумматора/ третий вход буферного регистра соединен с втоЛ ым входом первого элемента выборки и хранения, четвертый вход - с вторым входом второго элемента выборки и хранения,пятый вход - с вторым входом интегратора, а первый и второй выходы - с выходами первого и вторЪго ключа соответственно, 3. Устройство .по п. 1, о т л .и:Ч а ю щ е е с я тем, что блок уп- . равления содержит первый усилитель к последовательно соединенные элемент ЗАПРЕТ, второй сумматор, третий, сумматор, нуль-орган и блок циклового управления, а также последова
Изобретение относится к робототехнике и может быть использовано при Создании манипуляторов, применяемых в горнорудной промышленности.
Известно устройство f 1 для управления манипулятором, содержащее манипулятор, блок управления, тахогеяератор и датчик порода-уголт.
Однако из-за несовершенства датчиков порода-уголь качество выборки объектов низкое.
Наиболее близким техническим решением к предлагаемому является устройство, содержащее блок ввода сигнала, тахогенератор-и световой указатель , первый и второй выходы которого соединены с соответствующими входами блока определения координат объекта по положению светового указателя , а также блок управления, первым выходом подключенный к входу первого привода, связанного с первым датчиком положения, выход которого соединен с первым - входом блока управления, вторым выходом подключенг ного к входу второго привода, связанного с вторым датчиком положения, выход которого соединен с вторым входом блока управления, третьим и четвёртым выходом подключенного соответственно к первому и второму входёил третьего привода, связанного с первым и вторым датчиками конечного положения, выходы которых соединены соответственно с третьим и четвертым входами блока управления
Недостатком этого устройства является невозможность введения целеуказания независимо от исполнения манипулятором команды выборки объек; та с. движуь(егося конвейера, что , снижает производительность системы и качество выборки объектов.
Цель изобретения - расширение функциональных возможностей устройства.
Указанная цель достигается тем, что устройство для управления манипулятором содержит реверсивный счетчидс, первый и второй кольцевые регистры сдвига и буферные регистры, первый и второй входы каждого из которых соединены с соответствующими
выходами первого и второго кольцевого регистра сдвига, третий и четвертый входы - с первым и вторьол выходами блока .определения координат объекта по положению светового указателя соответственно, пятый вход с выходом тахогенератора, а первый и второй выходы- с пятым и шестшл входами блока управления соответственно, выход второго датчика .конеч5 иого положения подключен к входу, первого кольцевого регистра сдвига и первому входу реверсивного счетчика, вторш4 входом соединенного с выходом блока ввода Сигнала и входом второго кольцевого регистра сдвига.
Каждый буферный регистр содержит интегратор, последовательно соединенные первый элемент выборки и хранения, первый сумматор и первый ключ и ,последовательно подсоединенные второй элемент выборки и хранения и
второй ключ, второй вход которого, а также второй вход первого ключа подключены к первому вхоцу буферного регистра, вторым входом соединенного
с первым входом первого-и второго элемента выборки и хранения и интегратора, выход которого подключен к второму входу первого сумматора, третий вход буферного регистра соединен с вторым входом первого элемента выборки и хранения, четвертый вход - с вторьол входом второго элемента выборки и хранения, пятый вход с вторым входом интегратора, а первый и второй выходы - с выходами первого и второго ключа срответствейяо.
Блок управления содержит первый усилитель и последовательно соединенные элемент ЗАПРЕТ, втоврй сумматор, третий сумматор, нуль-орган и блок циклового управления, а также последовательно подсоединенные четвертый
сумматор и второй усилитель, вход которого подключен к второму входу третьего сумматора, первым входом
соединенного с входом первого лителя, выход которого подключен К первому выходу блока управления,второй выход которого соединен с выходом второго усилителя, третий и чет-вертый выходы - с первым и вторым выходами блока циклового управления соответственно, первый вход - с вто.рым входом второго сумматора, второй вход - с вторым входом четвертого сумматора, третий вход - с вторым входом блока циклового управле- ния, четвертый вход - с-третьим входом блока циклового управления и первым входом элемента ЗАПРЕТ, пя- . тый вход - с вторым входом элемента ЗАПРЕТ, а шестой вход. - с вторым входом четвертого сумматора.
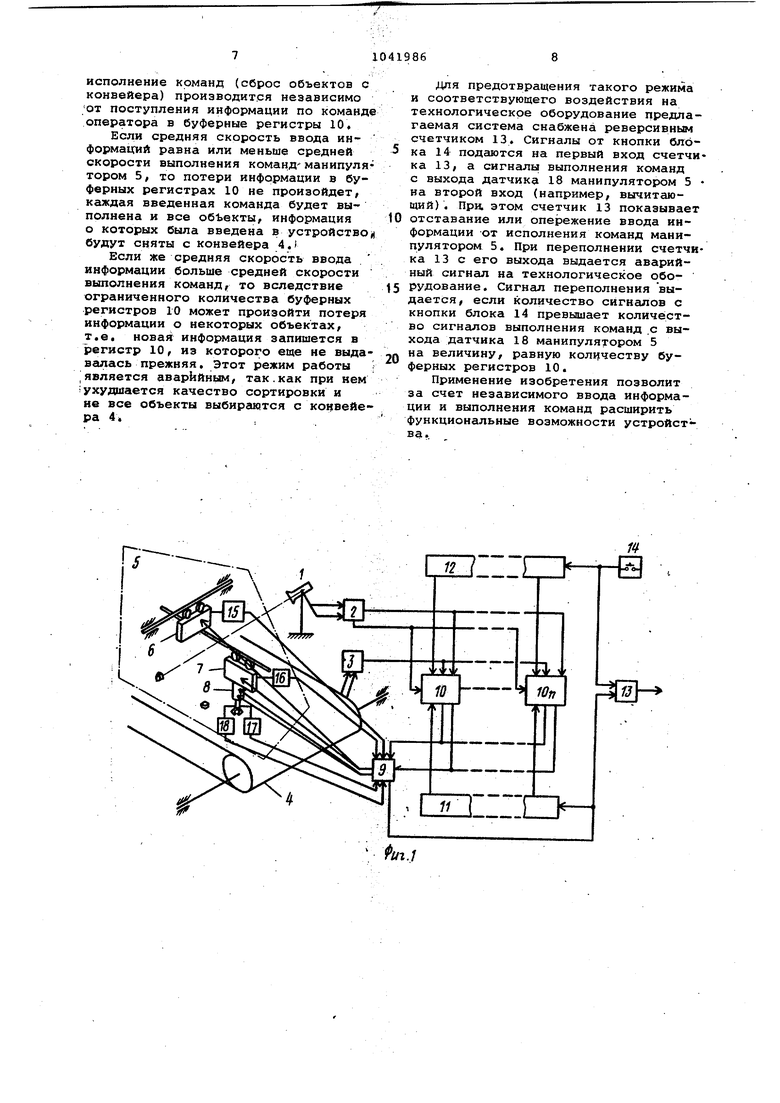
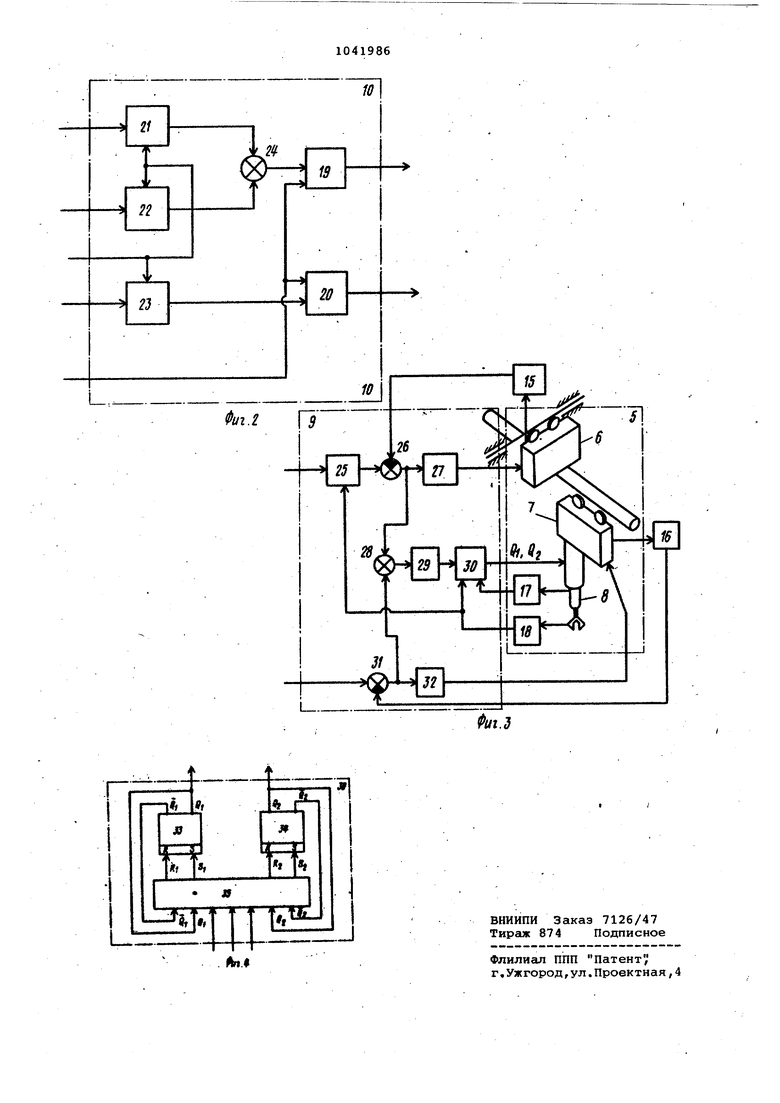
На фиг.1 представлена функциональ ная схема предлагаемого .устройства на-фиг.2 - функциональная схема буферного регистра; на фиг.З - функ- циональная схема блока управления; на фиг.4 - блок цикловЪго управленйя
Устройство содержит световой указатель 1, блок 2 определения координат объекта по положению светового указателя 1, тахогенератор 3, конвейер 4, манипулятор 5, первый, второй и третий приводы б, 7 и 8 соответственно, блок 9 управления/ буферные регистры 10, первый и второй кольцевые регистры 11 и 12 сдвига соответственно, реверсивный ,13, блок 14 ввода сигнала, перг вый и второй датчики 15 и 16 положения соответственно, первый и второй датчики 17 и 18 конечного положения соответственно.
В буферный регистр (фиг.2)- входят первый и второй ключи 19 и 20 соответственно, интегратор 21, первый и второй элементы 22 и 23 выборки и , хранения соответственир, первый сумматор 24.
Блок управления (фиг.З) включает элемент 25 ЗАПРЕТ, второй сумматор-. 26, первый усилитель 27, .третий сумматор 28, нуль-орган 29, блок 30 циклового управления, четвертый су 4матор 31, второй усилитель 32.
Блок циклового управления (фиг,4) содержит первый и второй триггеры 33 и 34 соответственно, логический,,, блок 35. R , Rj , S , выходные ,J сигнсшы логического блока 35; Q-i, Qk - выходные сигналы первого трир.г. гера 33; 2 выходные сигналы,;-, второго триггера 34. /
Устройство работает следующим i образом
В исходном состоянии в каждом из кольцевых регистров 11 и 12 сддига записана логическая единица в одном из разрядов, а э остальных - .
логические нули, причем первый регистр 11 имеет потенциальные выходы из каждого разряда, а второй регистр 12 - импульсные.
Оба кольцевых регистра 11 и 12
сдвига имеют одинаковое количество разрядов, ранное числу буферных регистров 10. Буферные, регистры 10 используются для хранения информации об объектах, которые необходимо
снять с конвейера. Число п таких регистров 10 определяется соотношением между длиной участка К конвейера 4, на котором возможно осуществление ввода целеуказания в устройство, и произведением времени ввода информации о движущемся объекте to на конвейере 4 человеком-оператором и скорости движения Vfnc, у конвейера 4
е
20
и .
о ток
Оператор, поворачивая сйетовой указатель 1, наводит его на объект,
находящийся на конвейере 4 и подлежащий снятию. При этом блок 2 определения координат объекта по положению указателя 1 непрерывно пересчитывает текущие координаты по азимуту р - углу места Е в координаты X и У и вырабатывает пропорциональные им аналоговые сигналы. Эти сигналы подаются на третий и четвертый, входы буферных регистров 10.
При совпадении указателя 1 с
объектом оператор нажимает кнопку на блоке 14. Логическая единица во втором кольцевом регистре 12 сдвига передвигается на один разряд, при этом на выходе обнуляемого разряда
появляетсяимпульс напряжения, который подается , например, в первый буферный регистр 10, По этому сигналу сигналы блока 2 проходят на соответствующие элементы 22 и 23 выборкйхранения, где запоминаются. При приеме информации элементы 22 и 23 выборки-хранения работают в режиме апериодических звеньев. При этом старая информация автоматически.сти
рается.
Одновременно по этому же сигналу происходит сброс в Нуль интеграто а 21., и по пропадании указанного сигнала обнуленный интегратор 21 запускается на интегрирование сигнала с
тахогенератора 3. Сумма сигналов с выхода первого элемента 22 выборки и хранения и интегратора 21, снимаемая с выхода сумматора 24, является сигналом, пропорциональным, текущему
значению -координаты У объекта.
Таким образом, после прихода управляющего Сигнала на второй вход буферного регистра 10 на первых вхо-. дах ключей 19 и 20 имеются напряже-:
ния, пропорциональные соответствующим
текущим координатам X и У объекта на конвейере 4, а сам буферный регистр 10 готов к выдаче этих сигналов на блок 9 управления манипулятором 5
Оператор наводит указатель 1 на новый объект и опять нажимает кноп- 5 ку на блоке 14. Описанный выше процесс повторяется, заполняется следующий буферный регистр 10. После заполнения последнего буферного регистра 10 при очередном нажатии 10 кнопки на блоке 14 вновь заполняется первый буферный регистр 10 и т.д.
Процесс ввода информации в буферные регистры 10, таким образом, происходит независимо от процесса 15 ее считывания.
Одновременно уровень логической единицы с первого разряда первого кольцевого регистра 11 сдвига подает ся на первый управляющий вход перво- 20 го буферного регистра 10.
Ключи 19 и 20 открываются, и сигналы, пропорциональные текущим коррдинатам объекта на конвейере 4, по даются на входы блока 9 управления 25 манипулятором 5.
По приходе на входы блока 9 управления сигналов, пропорциональных координатам X и Y снимаемого объекта, на конвейере 4 исполнительные приводы 7 и 6 начинагот отрабаты- вать рассогласования, возникаиощие на выходах второго 26 и четвертого 31 сумматоров, сводя их к нулю по абсолютной величине. Когда сумма сигналов рассорласований, возникай-. 35 щая на выходе третьего сумматора 28, достигает заданной малой величины (это значит, что схват манипулятора 5 находится над снимаемым объектом), срабатывает нуль-орган 29, запус- 40 кающий блок 30.
Блок 30 управляет исполнительным приводом 8 выдвижения и схвата.
Пусть в исходном положении оба триггера 33 и 34 находятся в положе- дг НИИ логического нуля, т.е. (32-0;
5
Когда на выходе нуль-органа 29 возникает сигнал логической единицы, на выходе S логического блока 35 „ появляется сигнал логической едини- цы, перебрасывающий первый триггер 33. При этом на выходе Q появляется сигнал логической единицы, который включает выдвижение схвата манипулятора 5.до конвейера 4. По оконча-. 55 НИИ выдвижения, срабатывает датчик 17 конечного положения, который подает с выхода сигнал в логический блок 35. На выходе 52 логического блока 35 появляется сигнал логической еди- 60 ницы, который перебрасывает второй триггер 34, у которого на выходе 0. появляется сигнал логической единицы. УказанньШ сигнал включает ржатие схвата. По окончании сжатия
срабатывает датчик 18 конечного положения схвата, с выхода которого снимается сигнал логической единицы, По этому сигналу элемент.25-ЗАПРЕТ разрывает сигнал, поступающий на первый вход сумматора 26,. куда подается нулевой сигнал.
При этом возрастает по абсолютной величине выходной сигнал сумматора 26 и логическая единица .на выходе нуль-органа 29 пропадает. Координатный исполнительный привод 6 отрабатывает нулевую уставку и схват манипулятора 5 подходит к краю конвейера 4 .
Сигнал логической единицы с-вых6да датчика 18 подается также на вход ло.гического блока 35. При этом на его выходе R возникает сигнал логической единицы, перебрасывающий триггер 33 в исходное состояние. При это на его выходе й сигнал логической единицы пропадает и выключает исполнительный орган выдвижения, что приводит к вдвижению манипулятора 5 с грузом в схвате.
Вдвижение осуществляется одно;временно с движением по координате У к краю конвейера 4.
Когда схват манипулятора 5 подходит к краю конвейера 4, абсолютная величина сигнала с выхода сумматора 26 становится малой и на выходе нуль органа 29 опять возникает сигнал логической единицы. При этом на выходе R2 логического блока 35 появляется сигнал логической единицы, устанавливающий в исходное положение триггер 34. Таким образом, блок 30 возвращается в исходное положение, схват разжимается, выбранный объект падает в тару на краю конвейера 4, элемент 2-5 ЗАПРЕТ опять подключает первый вход сумматора.26 к выходу буферного регистра 10. Пропадание сигнала логической единицы на выходе датчика 18 схвата свидетельствует о /готовности блока 9 управления манипулятором 5 к отработке снятия новог объекта. По пропадании сигнала логической единицы с выхода датчика 18 информация в первом кольцевом регистре 11 .сдвига передвигается на один разряд. При этом выходные ключи 19 и 20 первого буферного регистра 10 закрываются , а открываются такие же ключи 19 и 20 следующего буферного регистра 10, и описанный вьше процесс повторяется. После отработки текущих координат объекта с последнего буферного регистра 10, по пропадании логической единицы на выходе датчика 18 пятый и шестой входы блока 9 управления манипулятором 5 подключаются первым кольцевым регистре 11 сдвига к выходам первого буферного регистра 10 и т.д. Таким образом.
исполнение команд (сброс объектов с конвейера) производится независимо ОТ поступления информации по команде оператора в буферные регистры 10«
Если средняя скорость ввода информации равна или меньше средней скорости выполнения команд манипулятором 5, то потери информации в буферных регистрах 10 не произойдет г каждая введенная команда будет выполнена и все об19екты, информация о которых была введена в устройствои будут сняты с конвейера 4.)
Если же средняя скорость ввода информации больше средней скорости выполнения команд ,г то вследствие ограниченного количества буферных регистров 10 может произойти потеря информации о некоторых объектах, т.е. новая информация запишется в регистр 10, из которого еще не выда валась прежняя. Этот режим работы ,является аварийным/ так.как при нем ;ухудшается качество сортировки и не все объекты выбираются с конвейера 4.
Для предотвращения такого режима и соответствующего воздействия на технологическое оборудование предлагаемая система снабжена реверсивным счетчиком 13. Сигналы от кнопки блока 14 подеиотся на первый вход счетчика 13/ а сигнашы выполнения команд с выхода датчика 18 манипулятором 5 на второй вход (например, вычитающий) . При этом счетчик 13 показывает
0 отставание или опережение ввода информации -от исполнения команд манипулятором 5. При переполнении счетчика 13 с его выхода выдается аварийный сигнал на технологическое обо5 РУДование. Сигнгш переполнения выдается, если количество сигналов с кнопки блока 14 превышает количество сигналов выполнения команд .с выхода датчика 18 манипулятором 5 на величину/ равную количеству буферных регистров 10.
Применение изобретения позволит за счет независимого ввода информации и выполнения команд расширить функциональные возможности устройства..
П
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для выбора объекта управления | 1973 |
|
SU541148A1 |
