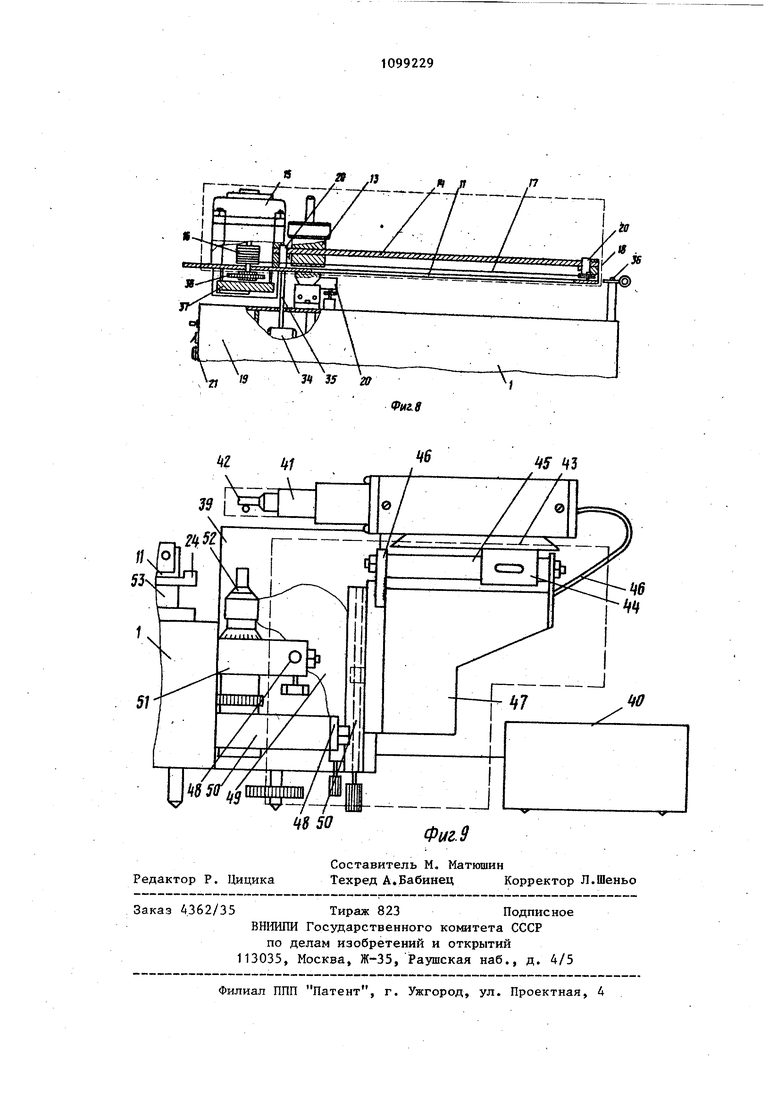
Изобретенне относится к испытательной технике, а именно к установкам для испытания образцов на прочность. Известна установка для испытания образцов на прочность, содержащая основание, размещенное на нем нагружающее устройство, выполненное в вид двуплечего рычага, груза, закрепленного на одном плече рычага, и противовеса, установленного на другом его плече, активный захват, выполнен (ный в виде т1орной призмы, связанной с рычагом, и пассивный захват, выпол ненный в виде перекладины с двумя опорными призмами. Переменная нагруз ка на образец передается через упор ную призму от груза, в качестве которого используют ведро, которое заполняют в процессе испытаний водои. После разрушения образца определяют массу воды и по известным зависимостям рассчитывают механическую прочность образца lj . Недостатком данной установки явля ется небольшой диапазон усилий,.которыми нагружают образцы при испытаниях . Наиболее близкой к изобретению по технической сущности и достигаемому результату является установка для испытания образцов на прочность, содержащая основание, размещенное на нем нагружающее устройство, выполненное в виде двуплечего рычага, .установленной на одном его плече каретки с грузом, привода ее перемещения, выполненного в виде злектро двигателя, и противовеса, установлен ного на другом плече рычага, активный захват, связанный с рычагом, пас сивный захват, привод перемещения по следнего, датчик усилия, выполненный в виде установленного на рычаге реохорда, ось которого через редуктор связана с осью электродвигателя, дат чик деформации и злектрически связан ное с последним регистрирующее устройство. Датчик деформации размещен непосредственно на образце, а отсчет деформации ведут по перемещению пассивного захвата, которое осуществляют для поддержания горизонтального положения рычага 2J . Недостатком известной установки является сложность процесса измерения деформации , обусловленная необходимостью размещения датчиков на каждом из испытуемых образцов . Цель изобретения - упрощение процесса измерения деформации образцов. Указанная цель достигается тем, что в установке для испытания образцов на прочность, содержащей основание, размещенное на нем нагруткающее устройство, выполненное в виде двуплечего рычага, установленной ,на одном его плече каретки с грузом, привода ее перемещения, выполненного в виде электродвигателя, и противовеса, установленного на другом плече рычага, активный захват, связанный с рычагом, пассивный захват, привод перемещения последнего, датчик усилия, выполненный в виде установленного на рычаге реохорда, ось которого через редуктор связана с осью электродвигателя, датчик деформации и связанное с последним регистрирующее устройство, датчик деформации выполнен в виде механотрона, установленного на основании с возможностью взаимодействия его чувствительного элемента с активным захватом, а установка снабжена механизмом перемещения механотрона и микрометрическим винтом, установленным с возможнвстью взаимодействия с механотроном и кинематически связанным с механизмом перемещения последнего. На фиг. 1 изображена предлагаемая установка, общий вид, на фиг. 2 - основание установки; на фиг. 3 - шарнирная опора для размещения рычага нагружающего устройства на фиг. 4 разрез А-А на фиг. 3} на фиг. 5 схема рычага и активного захвата; на фиг. 6 - привод перемещения пассивного захвата; на фиг. 7 - разрез Б-Б на фиг. 6} на фиг. 8 - привод перемещения каретки} на фиг. 9 схема размещения механотрона. Установка содержит основание 1, выполненное в виде короба с тремя секциями, наибольшая из которых выполнена без дна, на верхней стенке наибольшей секции выполнено прямоугольное отверстие 2, в боковых стенках - пазы 3, а в задней и лицевой стенках - по дв- паза А, причем один из пазов выполнен сквозным. На основании 1 установлена опора 5, включающая подушку 6, призму 7 и изолированнеы электроды 8 и 9. Электроды 8 жестко связаны с призмой 7, а электроды 9 размещены в подушке 6, выполнены подвижными в вертикальном направлении и подпружинены при помощи пружин 10, На призме 7 опоры 5 размещено нагружающее устройство, выполненное в виде двуплечего рычага 11, с линейной шкалой 12 на одном его плече, каретки 13 с грузом, -становленной на этом же плече рычаг 11 с возможностью перемещения по на)правляющим осям 14, и привода перемещения каретки 13. Привод включает реверсивный электродвигатель 15, барабан 16, закрепленный на оси последнего, и трос 17, жестко связанный с кареткой 13. Трос 17 частично намотаны на барабан 16 и перекинут через блок 18, закрепленный на конце рычага 11. Реверсивный электродвигатель 15 электрически связан через электроды 8 и 9 с источником 19 питания, который размещен в одной из секций основания 1. На конце рычага 11 и на опоре 5 установлены прерыватели 20, электрически связанные с переключателем 21 направления движения каретки 13. На конце рычага 11 в пазу 22 закреплены активный захват, выполненный в виде планки 23 и двух закрепленных на ней призм 24, а на другом плече рычага размещен противовес 25.
На основании 1 размещен также пассивный захват, выполненный в виде перекладины 26 с двумя опорными лриз мами 27, связанный с приводом его перемещения. Последний выполнен в виде несущей балки 28 с пазом, в котором закреплена перекладина 26, причем концы балки 28 размещены в боковых пазах 3 наибольшей секции основания 1, а нижняя поверхность балки 28 опирается на два Г-образных штыря 29, которые связаны между собо планкой 30. Каждый из щтырей 29 жест ко связан с соответствующими муфтой 31 и стержнем 32. Последние вставлены в пазы 4 основания 1, а один из стержней 32 выведен на лицевую сторону основания 1 и жестко связан со средством его вращения, например, рукояткой 33. В одной из секций основания 1 размещен демпфер 34, щток 35 .которого связан с плечом рычага 11, а на основании 1 жестко закреплен арретир 36, который имеет возможность взаимодействия с концом рычага 11. На последнем установлен
также датчик усилия, который выполнен в виде реохорда 37, ось которого через редуктор 38 жестко связана с осью реверсивного электродвигателя 15. Реохорд 37 электрически связан через электроды В и 9 с источником 39 постоянного тока и регистрирующим прибором, который выполнен в виде двухкоординатного потенциометра 40 С источником 39 и потенциометром 40 электрически связан датчик деформации, который выполнен в виде механотрона 41, установленного на основании 1, чувствительный элемент 42 которого установлен с возможностью взаимодействия с верхней поверхностью одной из призм 24 активного захвата. При этом механотрон 41 связан с механизмом его перемещения, который выполнен в виде опорной планки 43, жестко связанной с муфтой 44, стержня 45, вставленного в муфту 44 и прикрепленного за концы планками 46 к торцам площадки 47, направляющих стержней
48с закрепленным на них держателем
49и корректировочного винта 50, связывающего площадку 47 и держатель 49 Механизм перемещения механотрона при помощи стоек 51, с которыми жестко связаны концы стержней 48, установлен на основании и, а держатель 49 связан с микрометрическим винтом 52.
Установка работает следукицим образом.
Проводят тарировку датчиков усилия и деформации. При тарировке реохорда 37 рьиаг 11 при помощи арретира 36 закрепляют в горизонтальном положении. Включают электродвигатель 15, при помощи которого осуществляют пермещение каретки -13 вдоль рычага 11, При этом отклонение стрелки потенциометра 40 по одной координатной ос (например, X), вызванное указанным перемещением каретки 13, сравнивают с расстоянием, пройденным последней, которое фиксируется при помощи линейной шкалы 12 на рычаге 11.
При тарировке механотрона 41 последний перемещают в горизонтальной плоскости вдоль стержня 45 до тех пор, пока чувствительный элемент 42 механотрона 41 не займет положение над головкой микрометрического винта 52. Затем при помощи корректировочного винта 50 механотрон 41 перемещают вниз до тех пор, пока элемент 42 не коснется винта 52. После этого дискретным поворотом последнего производят нагружение мехаиотрона 41 и фиксируют показания микрометрического винта 52 и отклонение стрелки потенциометра 40 по другой координатной оси, При проведении испытаний образец 53 устанавливают на опорные призмы 27 пассивного захвата, затем вращением рукоятки 33 образец 53 поднима-:- О
ют до упора в призмы 24 активного захвата. Механотрон 41 перемещают по стержню 45 до тех пор, пока чувствительный элемент 42 механотрона 41 не оказывается над одной из призм 24, причем в случае испытания различных
по геометрическим размерам образцов предусмотрена возможность перемещения механотрона 41 по направляющим стержням 48. Затем корректировочным винтом 30 производят перемещение механотрона 41 до тех пор, пока его чувствительный элемент 42 не коснется верхней площадки призмы 24. После этого при помощи корректировочного винта 50 нагружают механотрон 41 до тех пор, пока стрелка потенциометра 40 не займет положения, противоположного исходному. Арретир 36 отводят в сторону и переключателем 21 приводят в движение вдоль рычага 11 каретку 13 с грузом. Потенциометр 40 регистрирует одновременно изменение усилия на образце 53 и его деформацию под нагрузкой. Раз- j, рущение образца 53 сопровождается плавным опусканием вниз рычага 11, 1
положении, а переключателем 21 приводят в движение каретку 13 в противоположном направлении вдоль рычага 11. Каретка 13 возвращается в исходное положение, которое фиксируется другим прерывателем 20. Переключатель 21 устанавливают в нейтральное положение, а рукояткой 33 опускают перекладину 26 с опорными призмами 27 вниз. Разрушенный образец 53 удаляют. Установка находится в исходном состоянии, на опорные призмы 27 устанавливают следующий образец и цикл испытаний повторяют.
Изобретение позволяет упростить процесс измерения деформации образцов за счет использования в качестве датчика деформации механотрона, установленного с возможностью взаимодействия
его чувствительного элемента с активным захватом, и снабжения установки механизмом перемещения механотрона и микрометрическим винтом, взаимодействукяцим с последним и кинематически 96 который взаимодействует с одним из прерывателей 20J При зтом останавливается каретка 13 и разгружается чувствительный злемент 42 механотрона 41. Затем при помощи корректировочного винта 50 механотрон поднимают в исходное положение, а переключатель 21 переводят в нейтральное положение.,Рычаг 11 при помощи арретира 36 закрепляют в горизонтальном связанным с механизмом его перемещения, что исключает необходимость установки деформации на каждый образец.
-Ч
6 Э
/Н
Фкг.д
А-А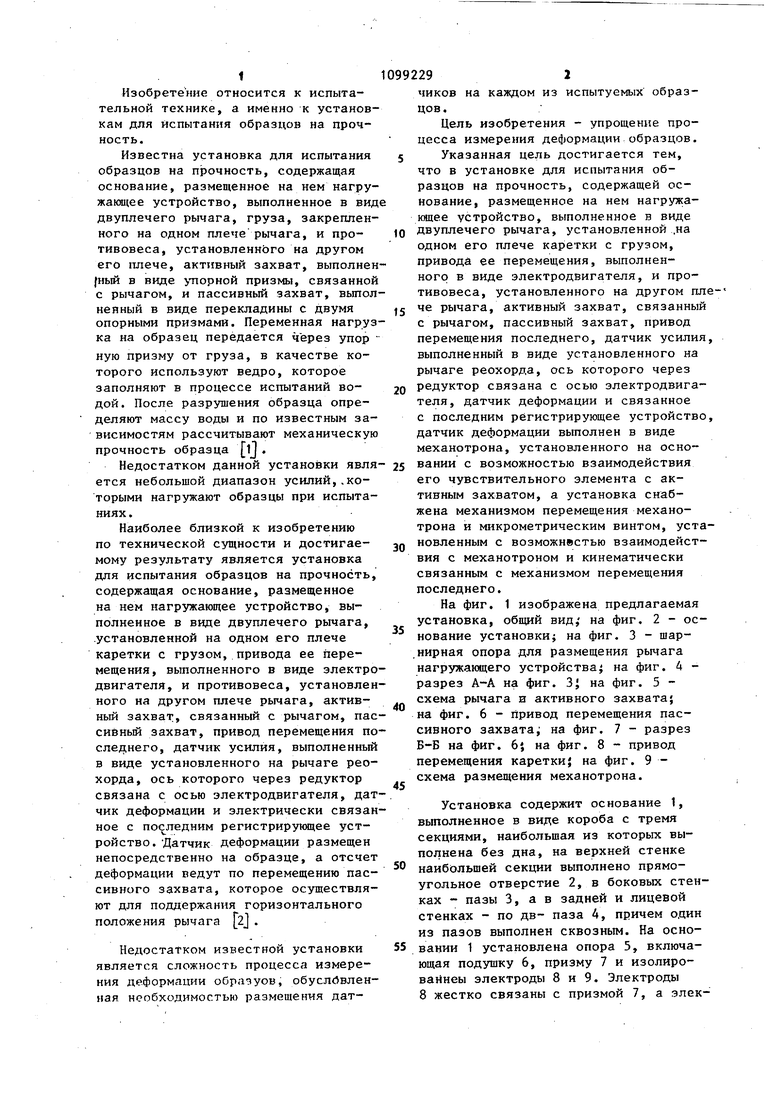
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания образцов на прочность | 1985 |
|
SU1293543A1 |
| Машина для исследования сложного напряженного состояния трубчатых образцов материалов | 1958 |
|
SU121586A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ МИКРОТВЕРДОСТИ | 1970 |
|
SU266317A1 |
| МАШИНА ДЛЯ СНЯТИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИКМАТЕРИАЛОВ | 1964 |
|
SU166524A1 |
| РЕЛАКСОМЕТР ДЛЯ ИСПЫТАНИЯ ТЕКСТИЛЬНЫХ МАТЕРИАЛОВ | 1970 |
|
SU288394A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СТОЙКОСТИ ТЕКСТИЛЬНЫХ МАТЕРИАЛОВ К ПИЛЛИНГООБРАЗОВАНИЮ | 1971 |
|
SU429348A1 |
| Универсальная машина для испытаний материалов на кручение | 1959 |
|
SU148939A1 |
| Машина для испытаний материалов на ползучесть и длительную прочность | 1974 |
|
SU526802A1 |
| Установка для исследования прочностных свойств материалов | 1978 |
|
SU896497A1 |
| Устройство для испытаний образцов материалов | 1978 |
|
SU922575A1 |
УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ НА ПРОЧНОСТЬ, содержащая основание, размещенное на нем нагружаняцее устройство, выполненное в виде двуплечего рычага, установленной на одном его плече каретки с грузом, привода ее .перемещения, выполненного в виде электродвигателя, и противовеса, установленного на другом плече рычага, активный захват, связанный с рычагом, пассивный.захват, привод перемещения последнего, датчик усилия, выполненный в виде установленного на рычаге реохорда, ось которого через редуктор связана с осью электродвигателя, датчик деформации и связанное с последним регистрирующее устройство, отличающаяся тем, что, с целью упрощения процесса измерения деформации образцов, датчик деформации выполнен в виде механотрона, установленного на осно. вании с возможностью взаимодействия его чувствительного элемента с актив- S ным захватом, а установка снабжена (/7 механизмом перемещения механотрона и микрометрическим винтом, установленным с возможностью взаимодействия с механотроном и кинематически связанным с механизмом перемещения последнего.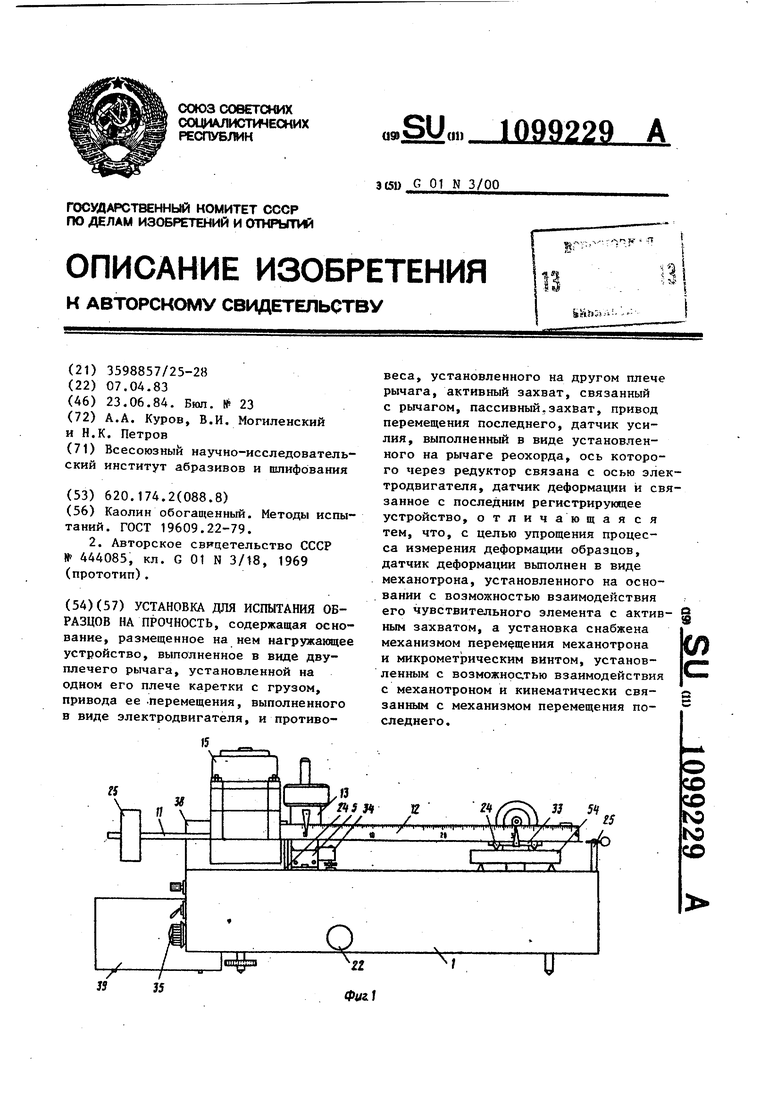
в и гвг геп , «гы1I ,,,.. L 1 И Г-|---Г -Ц. I Г1 .FV4I 1л J 7 f Фиг.5 f Jf Л 6-е л V5 JZ / 75 Фиг. 7
| Каолин обогащенный | |||
| Методы испытаний | |||
| ГОСТ 19609.22-79 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для определения ползучести и длительности прочности | 1969 |
|
SU444085A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
