эо
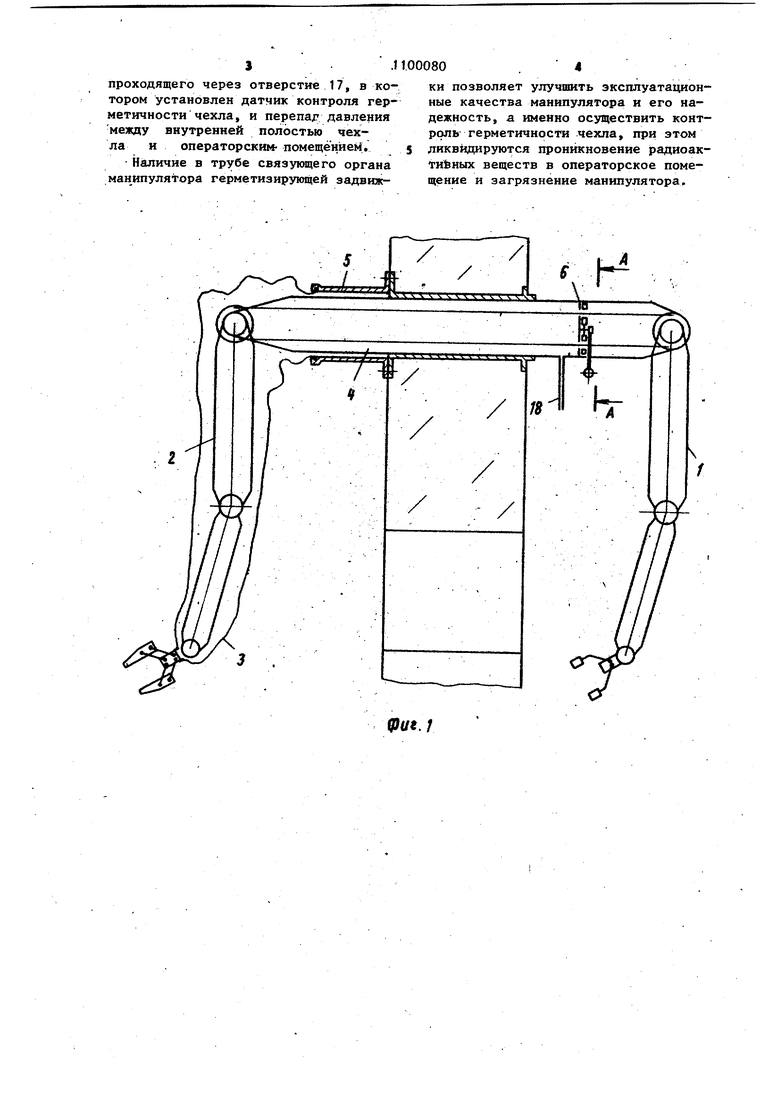
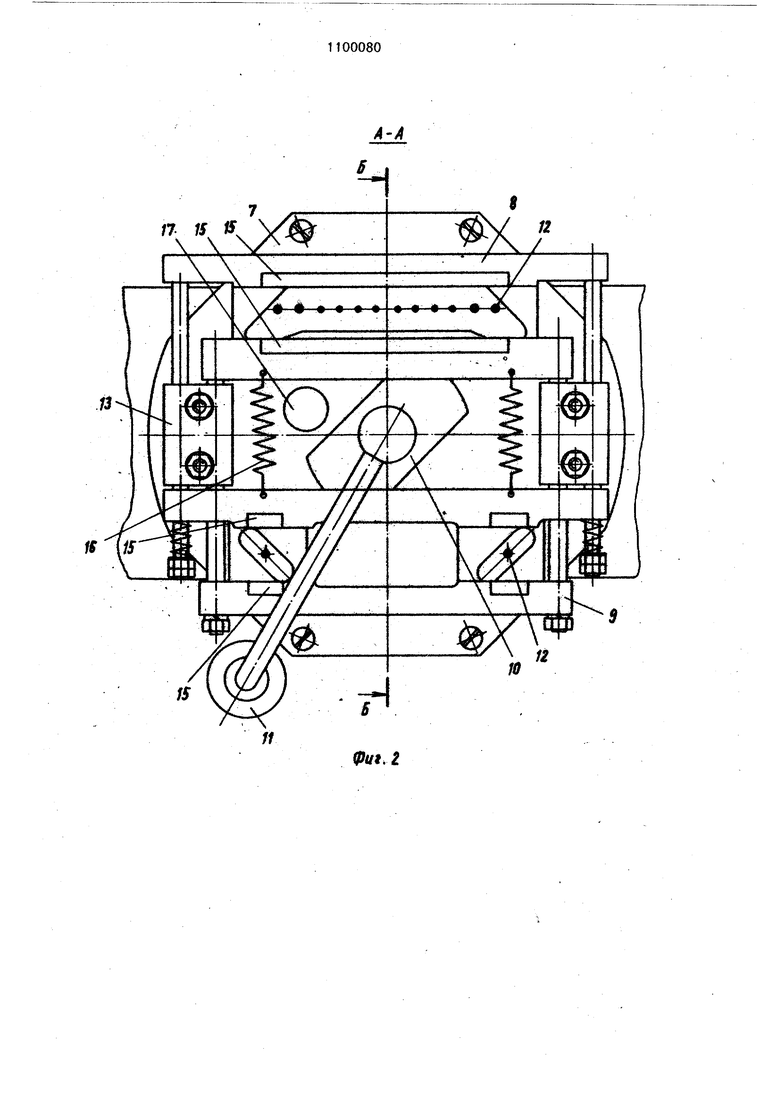
о Изобретение относится к машиностроению,, а именно к герметичным манипуляторам, предназначенным для дистанционного проведения работ в опасных для человека зонах, например в горячих камерах химически активных средах и т.п. Известен герметичный манипулятор, содержащий исполнительный ррган с защитным чехлом, задающий орган и связующий орган, выполненный в виде трубы, расположенной в опоре стенки, разделяющей камеру и операторское помещение lj. Недостатками устройства являются низкие эксплуатационные качества и ненадежность работы вследствие отсутствия данных о нарушении герметич ности чехла. Цель изобретения - улучаюние эксплуатационных качеств и. повьшение на дежности манипулятора. Цель.достигается тем, что герметичный манипулятор-снабжен датчиком (Контроля герметичности чехла и герме тизирукздей задвижкой, установленной в трубе связующего органа и выполнен ной, в имеющих возможность возвратно-поступательного перемещения р и связанного с ними кулачка, причем в задвижке выполнено отверстие, в ко тором установлен указанный датчик. Труба связующего оргйна снабжена штуцером,, . . На фиг. 1 изображен герметичный манипулятор, обнщй вид; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 2. Герметичный манипулятор состоит из задающего органа 1 исполнительного органйГ 2 с защитным чехлом 3 и связу ющего органа 4, выполненного в виде трубы и лежащего в опоре 5 стенки, разделяющей камеру с операторским по мещением. Исполнительный орган манипулятора располагается в камере пони женного давления j- задаюиций - в опера торском помещении. Герметичный чехол 3 плотно прилегает к исполнительному органу 2 в его нижней части и к опоре 5 со стороны камеры, запцщая от агрессивных веществ руку манипулятора и операторское помещение. Труба связукицего органа А снабжена герметизирующей задвижкой 6, сост ящей из пластины 7 двух рам 8 и 9 и кулачка 10, связанного с рукояткой 11. и кулачка 10, связанного с рукояткой 11. В пластине имеются вырезы, через ко- . торые проходят гибкие связи 12. . К пластине 7 крепятся направляюпще 13, прижиманицие рамы. 8 и9 к пластине 7 с помощью пружин 14. Рамы 8 и 9 (каждая) состоит из двух планок, к которьм крепится губчатая резина 15. Пружины 16 заставля ют рамы 8 и 9 планками постоянно прижиматься к кулачку 10. В пластине 7 имеется отверстие 17, в которое вставляется датчик контроля герметичности чехла по газовому потоку, например датчик термоанемометра. Труба: связующего органа 4 снабжена штуцером 18, с которьм связан датчико контроля герметичности чехла по изменению перепада давления, например микроманометр. Герметичный манипулятор работает следующим образом. При об11гчной работе движения от задающего органа передаются исполнительному с помощью гибких связей 12. При этом задвижка 6 открыта, рукоятка 11, кулачок 10 находятся в таком положении, что планки рам 8 и 9 раздвинуты и гибкие связи t2 свободно дви гаются меядцу планок в вырезах пластины 7. Когда манипулятор неподвижен и чехол 3 неразорван, т.е. герметичен, газовый поток в трубе связукщего органа 4 отсутствует. При наличии разрыва чехла 3 из-за пониженного давления в камере по отношению к операторскому помещению во внутренней полости чехла 3 давление уравнивается с давлением камеры, а в трубе связукицего органа 4 устанавливается газовый поток, направленный из операторского помещения в камеру. При открытой задвижке и при небольщих разрывах чехла ввиду большого сечения, через который проходит газовый поток, реличины скорости газового потока и перепада давления малы и не могут быть зарегистрированы даже с помощью высокочувствительных приборов. Закрывание задвижки осуществляется поворотом рукоятки 11 и связанного с ней кулачка 10. При зтом смыкаются планки рам 8 и 9, закрывая вырезы в пластине 7 и зажимая гибкие связи 12 губчатой резины 15. При закрь1той задвижке резко уве.личивается скорость газеЬого йотока. J . .1 проходящего через отверстие 17, в котором установлен датчик контроля герметичности чехла, и перепа;г давления между внутренней полостью чехла и операторским- помещением. Наличие в трубе связующего органа манипулятора герметизирующей задвиж80ки позволяет улучшить эксплуатационные качества манипулятора и его надежность, а именно осуществить контроль герметичности чехла, при этом ликвидируются проникновение радиоактийных веществ в операторское помещение и загрязнение манипулятора.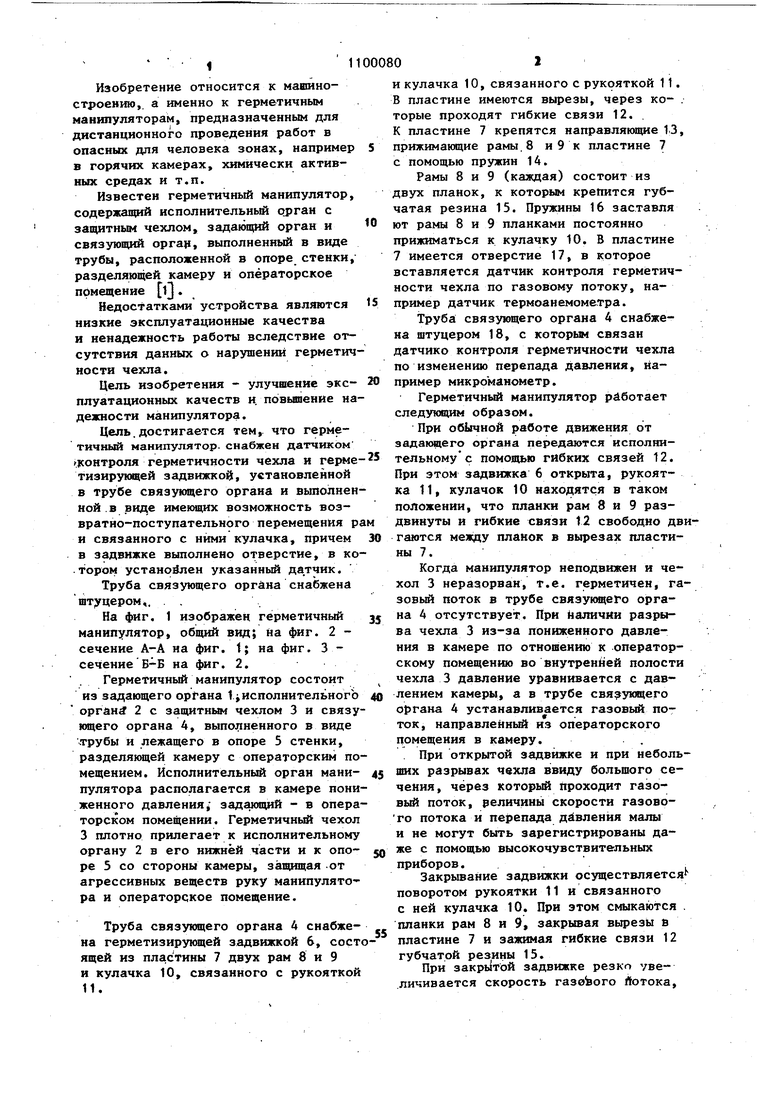
| название | год | авторы | номер документа |
|---|---|---|---|
| Чехол для манипулятора | 1977 |
|
SU764972A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691177C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| Герметичный манипулятор | 1979 |
|
SU772841A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
| Манипулятор | 2017 |
|
RU2671231C2 |
| Манипулятор | 1979 |
|
SU806402A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
1. ГЕРМЕТИЧНЫЙ МАНИПУЛЯТОР -ДЛЯ камеры пониженного давления, содержащий исполнительный орган с защитным чехлом, задающий орган и связуниций орган, выполненный в виде трубы, расположенной в опоре стенки, разделяющей камеру и операторское помещение, отличающийся тем, что, с цепью улучшения эксплуатационных качеств и повышения надежности, он снабжен датчиком контроля герметич ности чехла и герметизирующей задвижкой, установленной в трубе связующего органа и выполненной в виде имеющих возможность возвратно-поступательного перемещения рам и связанного с ними кулачка, причем в задвижке выполнено отверстие, в котором установлен указанный датчик. 2. Манипулятор по п. t, о т л ичающийся тем, что труба свя- i зующего органа снабжена штуцером. W
9ut. 1 h
)
fl
lput.3
LJL
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ и устройство доверенной загрузки компьютера с контролем периферийных интерфейсов | 2020 |
|
RU2748575C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
