(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Герметичный манипулятор | 1979 |
|
SU1100080A1 |
| Психрометр | 1989 |
|
SU1762208A1 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
| Герметичный манипулятор | 1979 |
|
SU772841A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691177C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| Устройство для управления копирующим манипулятором | 1980 |
|
SU935871A1 |
| ЧЕХОЛ МОБИЛЬНОГО УСТРОЙСТВА | 2016 |
|
RU2701580C1 |
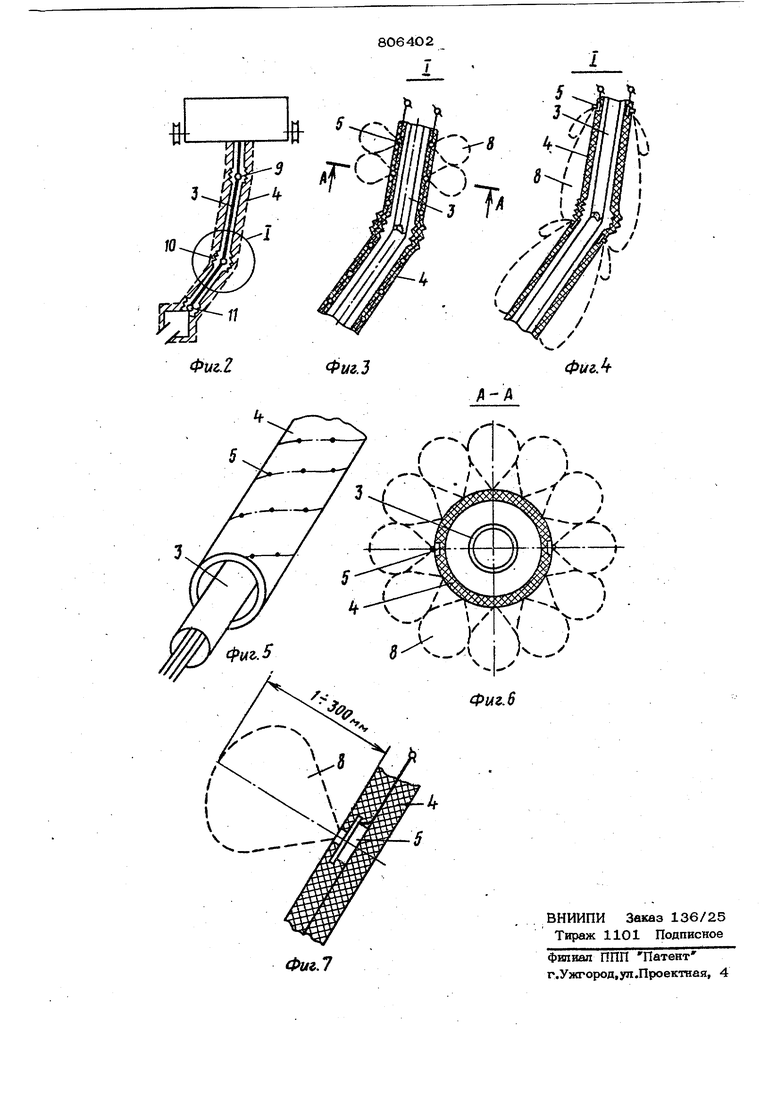
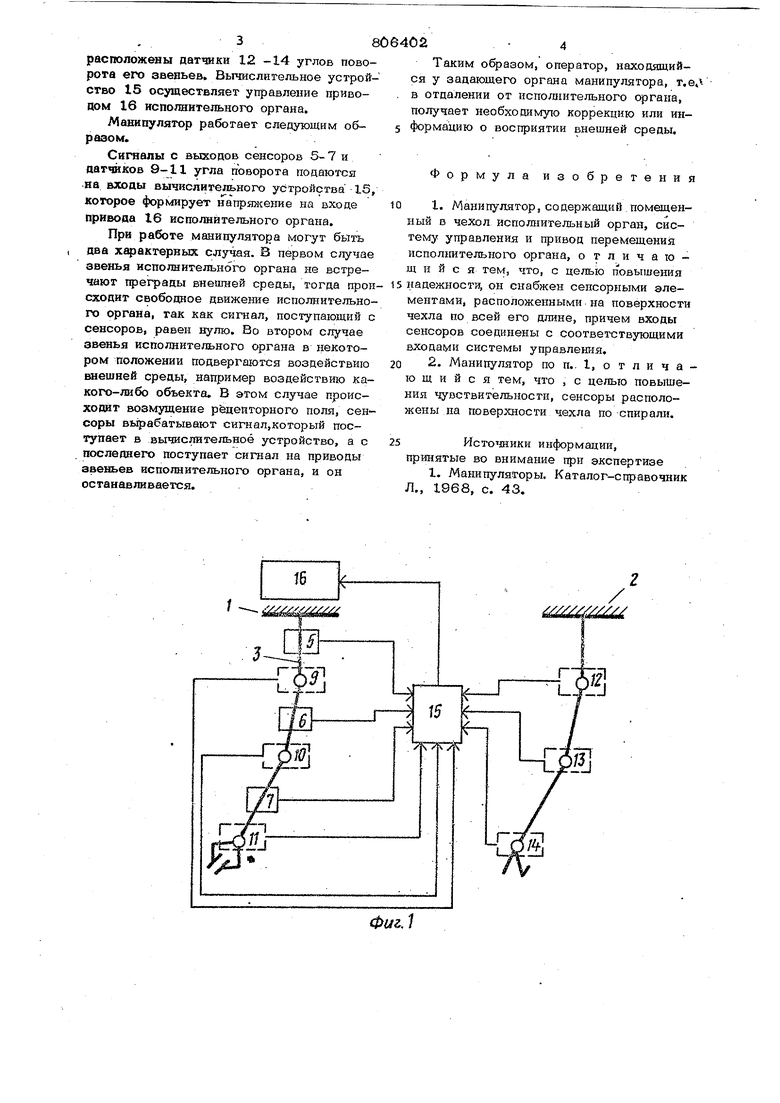
Изобретение относится к машшюстроению и может быть использовано в копирующих манипуляторах для автономной ориен тации его в рабочем пространстве, когда затруднены условия обзора технологического оборудования, а также . в манипуляторах, герметизация которых осуществляется защитными чехлами. Известен манипулятор, содержащий помещенный в чехол исполнительный орган систему управленяя и привод перемещения исполнительного органа . Недостатком известного манипулятора является низкая Н адежность из-за недолговечности и чехлов, которые разры ваются вследствие случайных соприкосновений с окружающим обору до Ba raelvj или предметами. Цель изобретения - повышение надеж кости манипулятора предотвращения поломок исполнительного органа или разрьюа защитного чехла. Поставленная цель достигается тем, что манипулятор снабжен сенсорными элементами, расположенными на поверхности .чехла по всей его длине, причем входы сенсоров соединены с соответствующими входами системы управления, а также тем, что сенсоры расположены на поверхности чехла по спирали. На фиг. 1 показана функциональная схема манипулятора, на фиг. 2 - исполнительный орган манипулятора; на фиг. 3 и 4 - узел J на фиг. 2; на фиг. 5 часть защитного чехла с возможным размещением-сенсоров на его поверхности; на фиг. 6 - разрез А-А на фиг. 3 на фиг.. 7 - пример крепления сенсора в чехле. Манипулятор содержит исполнительный орган 1 и задакший орган 2. Механическая рука 3 расположена в герметичном чехле 4, На поверхности чехла располоены сенсоры 5,6 и 7, создающие чувтвительное рецепторное поле 8. В суставах исполнительного органа азмещены датчики 9-11 углов поворота веньев. В суставах задающего органа 2 расположены датчики 12 -14 углов поворота его звеньев. Вьршслигельное усгройство 15 осуществляет управление приводом 16 исполнительного органа. Манипулятор работает следующим образом. Сигналы с вьЕкодов сенсоров 5- 7 и датчиков 9-11 угла поворота подаются на входы вычислительного устройства 15, которое формирует напрям ение на входе привоаа 16 исполнительного органа. При работе манипулятора могут бьттъ два х актерных случая. В первом случае звенья исполнительного органа не встречают преграды внеишей среды, тогда прои сходит свободное движение исполнительного органа, так как сигнал, поступающий с сенсоров, равен нулю. Во втором случае звенья исполнительного органа в некотором положении подвергаются воздействию внешней среды, например воздействию какого-либо объекта. В этом случае происходит возмущение рёдеиторного поля, сенсоры вырабатывают сигнал,который поступает в вычислительное устройство, а с последнего поступает сигнал на приводы звеньев исполнительного органа, и он останавливается.
/
k:2222222k27
ж-тгХ
Фиг.1 Таким образом, оператор, находящийся у задающего органа манипулятора, т.еЛ в отдалении от испогагительного органа, получает необходимую коррекцию или информацию о восприятии внешней среды. Формула изобретения 1. Манипулятор, содержащий помещенный в чехол исполнительный орган, систему управления и привод перемещени-я испол1штельно1чэ органа, отличающий с я тем, что, с целью повышения надежности, он снабжен сенсорными элементами, расположенными на поверхности чехла по всей его длине, причем входы сенсоров соединены с соответствующими входами системы управления. 2. Манипулятор по п.. 1, о т л и ч а ю щ и и с я тем, что , с целью повышения чувствительности, сенсоры расположены на поверхности чехла по спирали. Источники информации, принятые во внимание при экспертизе 1. Манипуляторы. Каталог-справочник Л., 1968, с. 43.
