Изобретение относится к электротехнике и может быть использовано в промышленных установках с малыми скоростями движения рабочего органа требукндих улучшенных динаьшческих характеристик электропривода, например, манипуляторах роботов, механизмах подачи и др.
По основному авт. св. № 649116 известен электропривод, содержащий .индукторную машину двойного питания одна обмотка статора которой подключена к преобразователю, имеющему два управляющих входа соответственно по частоте и амплитуде выходного напряжения, последний из которых соединен с выходом корректирующего элемента, вход которого соединен с выходом фазового детектора, задаюш 1й генератор регулируемой частоты, другая обмотка статора подсоединена к источнику возбуждения, например к сети или преобразователю, вход которого подключен к выходу задающего генератора постоянной частоты, третья обмотка измерительная размещена в рабочем зазоре машины, сумматор, входы которого подключены сооветственно к измерительной обмотке и к датчику тока возбуждения маши{пя, выход сумматора соединен с первым входом фазового детектора, второй вход которого соединен с измерительной обмоткой to
Известное устройство электропривода переменного тока не обеспечивает необходимое качество переходных процессов при нестационарных условиях эксплуатации: первоначальном включении электропривода, пуске на максимальную скорость, реверсе, динамическом торможении и останове. В этих случаях при больших значениях разности частот напряжений питания обмоток двигатель переходит из синхронного в асинхронный режим . с колебательным характером переход-ч ных процессов.
Цель изобретения - улучшение динамических характеристик.
Поставленная цель достигается тем что в электропривод дополнительно введены источник управлякицего напряжения, управляемый ключевой элемент, задатчик интенсивности, четыре микропереключателя и блок управления режимами, первый выход которого соединен с управляющим входом преобразователя частоты, а второй выход с управляющим входом управляемого ключевого элемента, через которьм выход источника управляющего напряжения соединен с входом задатчика интенсивности, выход которого соединен с входом задакщего генератора регулируемой частоты, выход которого соединен с первым входом блока управления режимами, второй и .третий входы которого подключены соответственно к выходам задакицего генератора постоянной частоты и ис7 точника управляющего напряжения, четвертый, пятый, шестой и седьмой входы блока управления режимами под ключены к соответствующим микропереключателям.
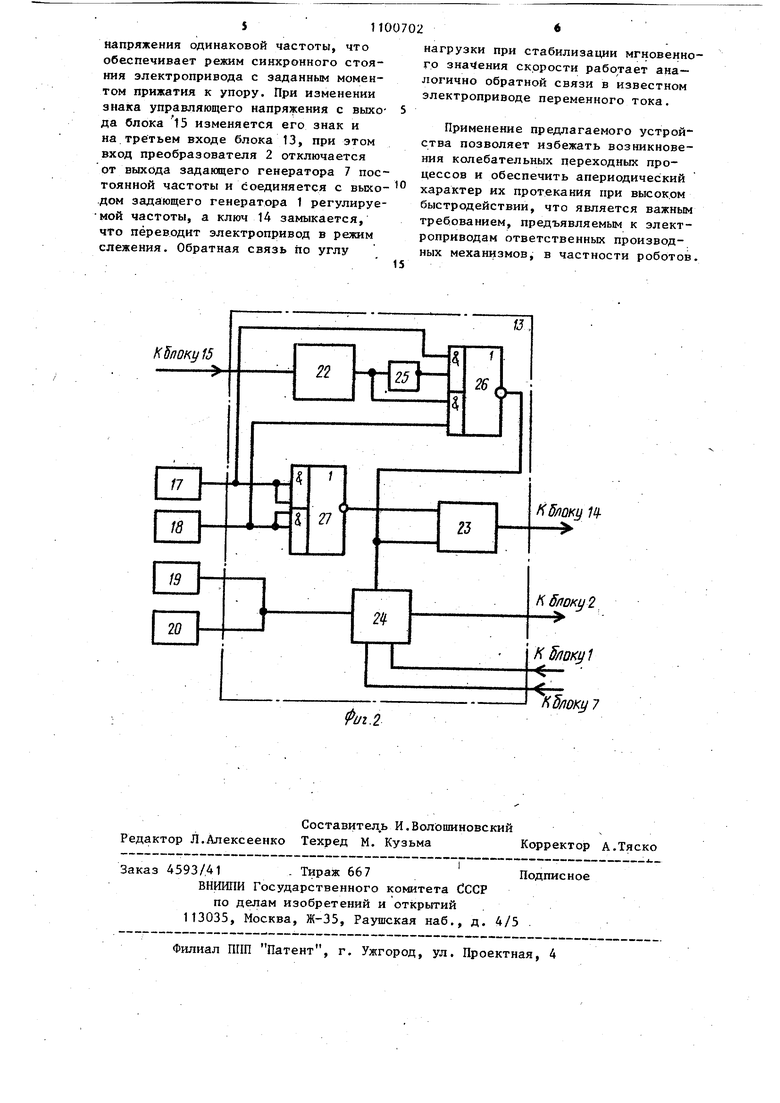
На фиг. 1 изображена функциональная схема предлагаемого электропривода; на фиг. 2 - схема блока управления режимами.
Электропривод содержит задающий генератор 1 регулируемой частоты, преобразователь 2, соединенный с обмоткой 3 управления машины 4 двойного питания. Обмотка 5 возбуждения подключена к преобразователю 6, который соединен с задающим генератором 7 постоянной частоты. Измерительная обмотка 8 имеет число пар полюсов такое же, как у обмотки возбуждения. Измерительная обмотка 8 соединена с одним входом сумматора 9, выход которого соединен с первым входом фазового детектора 10, второй вход которого соединен с измерительной обмоткой 8. Корректирующий блок 11 содержит фазовый детектор 10 и корректирукидай элемент 12. Выход фазового детектора 10 соединен с корректирующим элементом 12 блока управления преобразователя 2, управляниций вход которого соединен с первым выходом блока 13 управления режимами, второй выход которого соединен с управляннцим входом ключевого элемента 14, через который выход источника 15 управляющего напряжения соединен с входом задатчика 16 интенсивности, выход которого соединен с входом задающего генератора 1 регулируемой частоты, выход которого соединен с перзю входом блока 13, второй вход которого соединен с выходом задающего генератора 7, третий вход блока 13 соединен с выходом источника 15 управляющего
напряжения, четвертый и пятый входы блока 13 соединены соответственно с микропереключателями 17 и 18 огра ничения движения рабочего органа, шестой и седьмой входы блока 13 соединены соответственно с микропереключателями 19 и 20 упоров. Пре образователь 6 с задающим генератором 7 образуют источник 21 возбуждения, в качестве которого в простей шем случае может быть использована сеть промьшшенной частоты.
Блок 13 управления режимами содержит нуль-компара;тор 22, элемен23 выбора состояния ключевого элемента 14, переключатель 24 задания частоты преобразователя 2, инвертор 25, первый и второй элементы 2И-ИЛИНЕ соответственно 26 и 27. При этом первый и второй входы блока 13 образованы первым и вторым входами переключателя 24, третий вход блока 13 образован входом нуль-компаратора 22, четвертый и пятый входы блока 13 образованы соответственно первой и второй парами входов второго элемента 2И-ИЛИ-НЕ, шестой и седьмо входы блока 13 объединены между собой и соединены с третьим входом переключателя 24, выход которого образует выход блока 13, второй выход которого образован выходом элемента 23, один из входов которого соединен с выходом второго элемента 2И-ИЛИ-НЕ 27, а другой соединен с четвертым входом переключателя 24, один из первой пары входов первого элемента 2И-ИЛИ-НЕ 26 соединен с чевертым входом блока 13, а другой через инвертор 25 соединен с вькодом нуль-компаратора 22, выход которого соединен с одним из второй пары входов элемента 26, а другой - с пятым входом блока 13.
Электропривод работает следующим образом..
Индукторная машина 4 двойного питания обеспечивает электромагнитную редукцию скорости с заданным передаточным соотношением при Наличии напряжения управления и напряжений возбуждения на соответствуюдах обмо ках управления 3 и возбуждения-5, расположенных на статоре.
Разомкнутое состояние микропереключателей 17, 18, 19 и 20 соответствует положению рабочего органа, например манипулятора, в разрешен-.
ной зоне движения. При этом состоянии на управляющий вход управляе, мого ключевого элемента 14 поступает напряжение, обеспечивающее его
замыкание, в результате чего достигается подключение входа задатчика 16 интенсивности к выходу источника 15 управляющего напряжения. При наличии информации на втором входе бло
ка 13 о том, что на обмотку возбуждения подано напряжение, осуществляется автоматическое подключение выхода задающего генератора 1 регулируемой частоты к управляющему входу по частоте преобразователя 2 путем замыкания в блоке 13 первого входа с первым выходом. В результате этого обеспечивается подача управляющего воздействия по частоте на преобразо0 ватель 2 и скорость вращения ротора изменяется заданным образом, т.е. в соответствии с законом, вырабатываемым источником 15 управляющего напряжения.
Задатчиком 16 интенсивности обеспечивается заданное изменение управляющего воздействия, а следовательно, и частоты питания обмотки 3 управления, что позволяет сформировать апериодический по характеру с заданной постоянной времени переходный процесс по скорости электропривода. При заходе рабочего органа, например манипулятора, в
5 запрещенную зону замыкается микропереключатель ограничения двигателя (17 или 18 в зависимости от направления движения), блок 13 размы-, кает ключ 14, при этом управляющий
0 сигнал изменяется от исходного до нулевого, а частота обмотки 3 управления изменяется соответственно от исходной до близкой к частоте
обмотки 5 возбуждения, тем самым
5 обеспечивается режим динамического, торможения при движении рабочего органа от микропереключателя ограничения движения к упору. При заходе рабочего органа на микропереключа0 тель упора (19 или 20 в соответст вии с направлением движения) управляемый переключатель 24 блока 13 переключает вход преобразователя 2 с выхода задающего геиенатора 1 ре5 гулируемой частоты на выход задающего генератора 7 постоянной частоты. В результате этого на обмотки управления 3 и возбуждения 5 подаются $110 напряжения одинаковой частоты, что обеспечивает режим синхронного стояния электропривода с заданным моментом прижатия к упору. При изменении знака управляющего напряжения с выхода блока 15 изменяется его знак и на третьем входе блока 13, при этом вход преобразователя 2 отключается от выхода задающего генератора 7 постоянной частоты и соединяется с выхо.дом задающего генератора 1 регулируемой частоты, а ключ 14 замыкается, что переводит электропривод в режим слежения. Обратная связь по углу нагрузки при стабилизации мгновенного скорости работает аналогично обратной связи в известном электроприводе переменного тока. Применение предлагаемого устройства позволяет избежать возникновения колебательных переходных процессов и обеспечить апериодический характер их протекания при высоком быстродействии, что является важным требованием, предъявляемым к электроприводам ответственных производных механизмов, в частности роботов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый электропривод постоян-НОгО TOKA | 1977 |
|
SU817951A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2054223C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1991 |
|
RU2028026C1 |
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
| Электропривод транспортного средства | 1986 |
|
SU1359171A1 |
| Вентильный электропривод постоянного тока | 1983 |
|
SU1098098A1 |
| Электропривод переменного тока | 1983 |
|
SU1128362A1 |
| Преобразователь частоты с широтно-импульсной модуляцией | 1986 |
|
SU1381667A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Электропривод транспортного средства | 1983 |
|
SU1430304A1 |
ЭЛЕКТРОПРИВОД по авт. св. № 649116, отличающийся тем, что, с целью улучшения динамических характеристик, в него дополнительно введены источник управляющего напряжения управляемый ключе-, вой элемент, задатчик интенсивности четыре микропереключателя и блок управления режимами, первый выход которого соединен с управляющим входом преобразователя частоты, а второй выход - с управляю1цим входом управляемого ключевого элемента, через который выход источника управляющего напряжения соединен с входом задатчика интенсивности вьЬсод которого соединен с входом задающего генератора регулируемой частоты, выход которого соединен с первым входом блока управления режимами, второй и третий входы которого подключены соответственно к выходам задающего гененатора постоянной частоты и источника управляющего напряжения, четвертый, пятьй, шестой и седьмой входы блока управления режимами подключены к соответствующем микропереключателям.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод | 1976 |
|
SU649116A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
