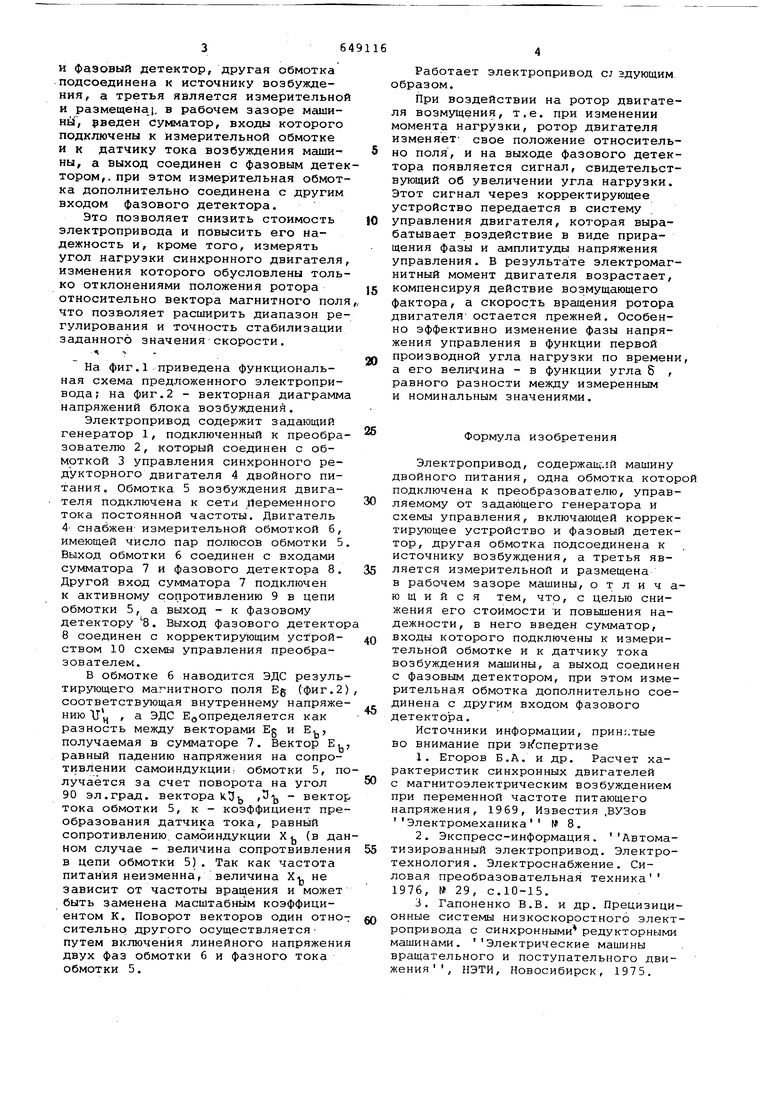
54) ЭЛЕКТРОПРИВОД и фазовый детектор, другая обмотка подсоединена к источнику возбуждения, а третья является измерительной и размещена., в рабочем зазоре машиHti, рведен сумматор, входы которого подключены к измерительной обмотке и к датчику тока возбуждения машины, а выход соединен с фазовым детек тором,, при этом измерительная обмотка дополнительно соединена с другим входом фазового детектора. Это позволяет снизить стоимость электропривода и повысить его надежность и, кроме того, измерять угол нагрузки синхронного двигателя изменения которого обусловлены толь ко отклонениями положения ротора относительно вектора магнитного пол что позволяет расширить диапазон ре гулирования и точность стабилизации заданного значения скорости. На фиг.1 приведена функциональная схема предложенного электропривода; на фиг.2 - векторная диаграмм напряжений блока возбуждения. Электропривод содержит задающий генератор 1, подключенный к преобра зователю 2, который соединен с обмоткой 3 управления синхронного редукторного двигателя 4 двойного питания. Обмотка 5 возбуждения двигателя подключена к сети йеременного тока постоянной частоты. Двигатель 4- снабжен измерительной обмоткой 6, имеющей число пар полюсов обмотки 5 Выход обмотки 6 соединен с входами сумматора 7 и фазового детектора 8. Другой вход сумматора 7 подключен к активному сопротивлению 9 в цепи обмотки 5, а выход - к фазовому детектору 8. Выход фазового детекто 8 соединен с корректирующим устройством 10 управления преобразователем. В обмотке 6 наводится ЭДС резуль тирующего магнитного поля Eg (фиг.2 соответствующая внутреннему напряже нию 11 , а ЭДС Еоопределяется как разность между векторами Eg и Е, получаемая в сумматоре 7. Вектор Е равный падению напряжения на сопротивлении самоиндукции: обмотки 5, п лучается за счет поворота на угол 90 эл.град. вектора кЗ, ,1, - векто тока обмотки 5, к - коэффициент пре образования датчика тока, равньай сопротивлению, самоиндукции Х (в да ном случае - величина сопротвивлени в цепи обмотки 5). Так как частота питания неизменна, величина Х не зависит от частоты вращения и может быть заменена масштабным коэффициентом К. Поворот векторов один отно сительнр другого осуществляется путем включения линейного напряжени двух фаз обмотки б и фазного тока обмотки 5. Работает электропривод с; эдующим бразом. При воздействии на ротор двигатея возмущения, т.е. при изменении омента нагрузки, ротор двигателя изменяет- свое положение относительно поля, и на выходе фазового детектора появляется сигнал, свидетельствующий об увеличении угла нагрузки. Этот сигнал через корректирующее устройство передается в систему управления двигателя, которая вырабатывает воздействие в виде приращения фазы и амплитуды напряжения управления. В результанте электромагнитный момент двигателя возрастает, компенсируя действие возмущающего фактора, а скорость вращения ротора двигателя остается прежней. Особенно эффективно изменение фазы напряжения управления в функции первой производной угла нагрузки по времени, а его величина - в функции угла б , равного разности между измеренным и номинальным значениями. Формула изобретения Электропривод, содержащлй машину двойного питания, одна обмотка которой подключена к преобразователю, управляемому от задающего генератора и схемы управления, включающей корректирующее устройство и фазовый детектор, другая обмотка подсоединена к источнику возбуждения, а третья является измерительной и размещена в рабочем зазоре машины, отличающийся тем, что, с целью снижения его стоимости и повышения надежности, в него введен сумматор, входы которого подключены к измерительной обмотке и к датчику тока возбуждения машины, а выход соединен с фазовым детектором, при этом измерительная обмотка дополнительно соединена с другим входом фазового детектора. Источники информации, прин;.тые во внимание при Э1 спертизе 1.Егоров Б.А. и др. Расчет характеристик синхронных двигателей с магнитоэлектрическим возбуждением при переменной частоте питающего напряжения, 1969, Известия ,ВУЗов Электромеханика № В. 2.Экспресс-информация. Автоматизированный электропривод. Электротехнология. Электроснабжение. Силовая преобразовательная техника 1976, № 29, с.10-15. 3.Гапоненко В.В. и др. Прецизиционные системы низкоскоростного электропривода с синхронными редукторными машинами. Электрические машины вращательного и поступательного движения , НЭТИ, Новосибирск, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1980 |
|
SU1059647A2 |
| Электропривод | 1980 |
|
SU955484A2 |
| Электропривод | 1983 |
|
SU1100702A2 |
| Электропривод | 1979 |
|
SU855915A2 |
| Электропривод | 1979 |
|
SU1023605A1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| Электропривод | 1983 |
|
SU1179511A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |

фиг Z
