Изобретение относится к промыслевой геофизике и может быть использовано для измерения азимута искривления скважины. Известно устройство для ориентации датчиков, содержащее в заполненном жидкостыо корпусе поплавковый маятник, рамку с датчиками и вилкой и контактную пару коллектор - токосъемник С1 3 Данное устройство характеризуется невысокой точностью измерения, поскольку имеет большое количество паразитных моментов трения, а именно две .пары подшипников в карданном под весе, подшипник на маятнике, трение в контактной паре коллектор-токосъем ник и другие погрешности, связанные с изготовлением деталей устройства. Наиболее близким к изобретению является устройство, содержащее корпус, заполненный жидкостью и жестко соединенный с токосъемником, две поворотные рамки с эксцентричными грузами, на одной из которых установлен токосъемник, а на другой - датчик угла, электрически связанный с маломоментньми спиральными токоотводами, при этом рамки установлены одтга под другой и имеют опоры, жестко связанные с корпусом tZU. . В данном устройстве исключено вли ние моментов сухого трения, возникаю IHX в узле токосъемника, на ориентирование в плоскость наклона рамки с датчиками, однако не исключены момен ты от сип сухого трения, возникающие в опорах рамки. С изменением темпера плотность жидкости меняется и, соответственно, реакции в опорах рам ки увеличиваются, а так как температура в скважине меняется в широком диапазоне (20-250 С), то в широком диапазоне меняются реакции в опорах рамки, и при малых углах наклона скважины это существенно влияет на точность ориентирования датчиков. Цель изобретения - повышение точности ориентирования. Указанная цепь достигается тем, что в устройстве для ориентирования датчиков, содержащем корпус, заполненный жидкостью и жестко соединенны с токосъемником, две поворотные рамки с эксцентричными грузами, на одной из которых установлен токосъемник, а на другой - датчик угла, электрически связанный с маломоментными спиральньми токоподводами, при этом рамки установлены одна под другой и имеют опоры, жестко связанные с корпусом, одна из рамок снабжена маятником, ось вращения которого расположена вьше и параллельно оси поворота рамки, а дачтик установлен на маятнике.j На чертеже пр едставлена кинемати-ческая схема устройства для ориентирования датчиков. В подщипниках 1, жестко закрепленных в корпусе, установлена рамка 2 с эксцентричным грузом 3, с рамкой 2 жестко связаны упор 4 и коллектор 5 токосъемника 6, жестко связанного с корпусом, в подшипниках 7 установлена рамка 8 с эксцентричным грузом 9. На рамке 8 жестко закреплена ппанка 10. В рамке 8 в подшипниках 11 установлена рамка 12 с эксцентричным грузом 13, в рамке 12 в подшипниках 14 установлен маятник 15 с грузом 16, на маятнике 15 жестко закреплен датчик азимута 17. Электрическая связь между рамками 2 и В осуществляется при помощи гибкого маломоментного токоподвода 18. Из приведенной кинематической схемы видно, что точность установки рамки 12 не зависит от зенитного уг ла. Устанавливающий момент поплавковой рамки 8 изменяется по закону М А sin0, где б - зенитньй угол; А - коэффициент пропорциональности. Соответственно, точность установки рамки 8 изменяется по такому же закону, она будет максимальной при б 90 и минимальной при . Маят-. ник 15 позволяет компенсировать неточность установки рамки 8 в плоскость наклона и, соответственно, увеличить точность установки датчика азимута 17 в плоскость горизонта. Маятник 15 имеет ограниченный угол поворота, в пределах неточности установки рамки 8, поэтому ось вращения маятника 15 расположена в верхней точке, а груз 18 - в нижней точке рамки 12 (в пределах габарита рамки 12). JTaKoe исполнение маятника 15 позволяет получить максимальное плечо 1 и максимально возможный устанавливакиций момент при минимальном диаметре устройства. Устройство для ориентирования датчиков работает следующим образом. При отклонении корпуса прибора от вертикали на зенитный угол поплавковая рамка 8 под действием груза 9
311029164
устанавливается в плоскость наклона Предлагаемое устройство позволяет
с какой-то погрешностью 4V . Рам-разработать инклинометр непрерывного
ка 12 под действием груза 18 уставав-действия малого диаметра для исследоливается по вертикали (пог1 ешностьвания геофизических скважин. Эксппуустановки рамки определяется качест- 5атация такого инклинометра сократит
вом подшипников 11 и не зависит отвремя инклиномётрирования скважины
величины зенитного угла). Маятник 15почти втрое по сравнению с существместе с закрепленн1 м на нем датчи-вукщими инклинометрами точечного изком азимута 17 под действием груза 16мерения. В сравнении с прототипом
устанавливается по вертикали, компен-10отпадает необходимость в применении
сируя погрешность установки Ч рам-гибких токоподводов и коллекторной
ки 8. Поплавковая рамка 2 под дёйст-рамки, обеспечивая при этом экономию
вием груза 3 также устанавливаетсяматериалов и затрат труда, на изготовв плоскость наклона с погрешностью,ление, и, самое главное, повышается
не превышающей (90. Электрические is,точность ориентирования датчиков при
ются на коллектор 5 токосъемни- - малых углах наклона скважины и, слека 6 через гибкий токопод- довательно, повышается точность измевод 18.;рения ориентирования скважины в
пространстве.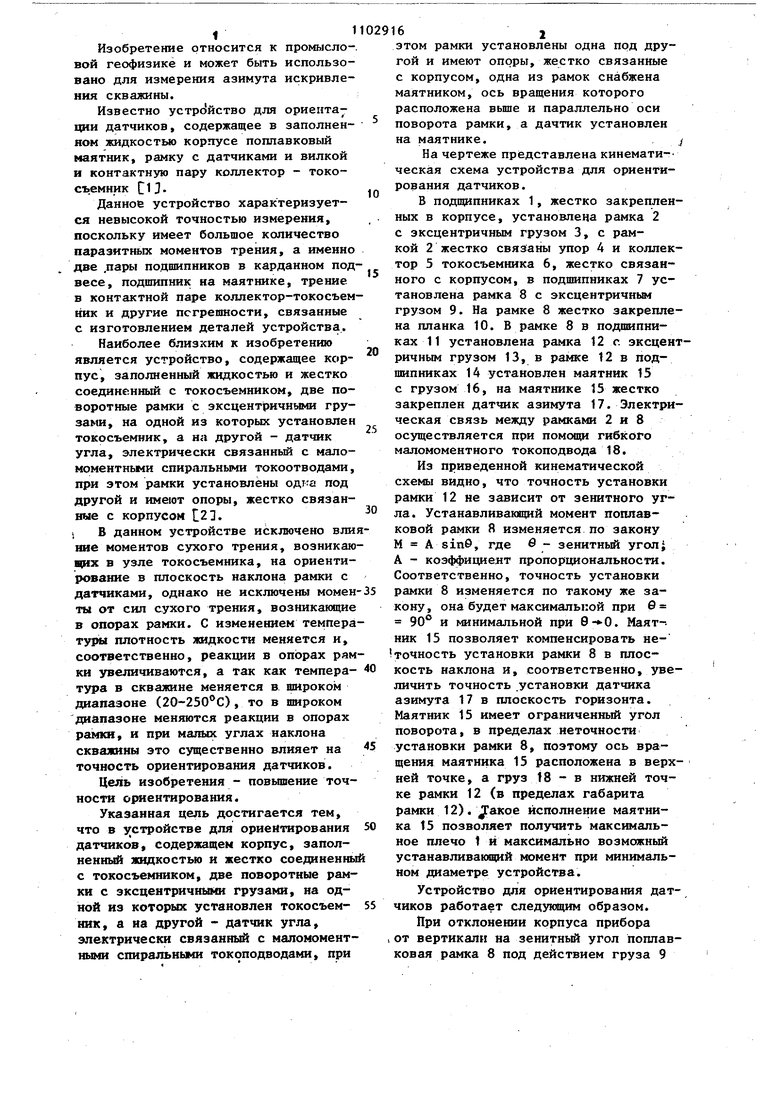

| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| Устройство для измерения искривления скважины | 1979 |
|
SU866149A1 |
| БЛОК ПЕРВИЧНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СКВАЖИННОГО МАГНИТОМЕТРА-ИНКЛИНОМЕТРА | 1992 |
|
RU2063052C1 |
| Устройство для измерения магнитного азимута оси скважины | 1982 |
|
SU1127973A1 |
| Преобразователь зенитного угла | 1982 |
|
SU1027379A1 |
| Устройство для ориентирования датчиков в скважине | 1983 |
|
SU1137190A1 |
| Устройство для ориентирования датчиков в скважине | 1985 |
|
SU1321810A1 |
| БЛОК ПЕРВИЧНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СКВАЖИННОГО МАГНИТОМЕТРА-ИНКЛИНОМЕТРА | 1992 |
|
RU2065184C1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |

УСТРОЙСТВО ДЛЯ ОТИЕНТИРОВАНИЯ ДАТЧИКОВ, содержащее корпус, заполненный жидкостью и жестко соединенный с токосъемником, две поворотные рамки с эксцентричнюга грузами, на одной из которых установлен токосъемник, a на другой - датчик угла, электрически связанный с маломоментными спиргшьными токоотводами, при этом рамки установлены одна под другой и имеют опоры, жестко связанные с- корпусом, отлич ающ е е с я тем, что, с целью повьнпения точности ориентирования, одна из рамок снабжена маятником, ось вращения которого расположена вьвпе и параллельно оси поворота рамки, a датчик установлен на маятнике.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ГРАВИТАЦИОННЫЙ ОРИЕНТАТОР ДАТЧИКОВ | 0 |
|
SU332204A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
