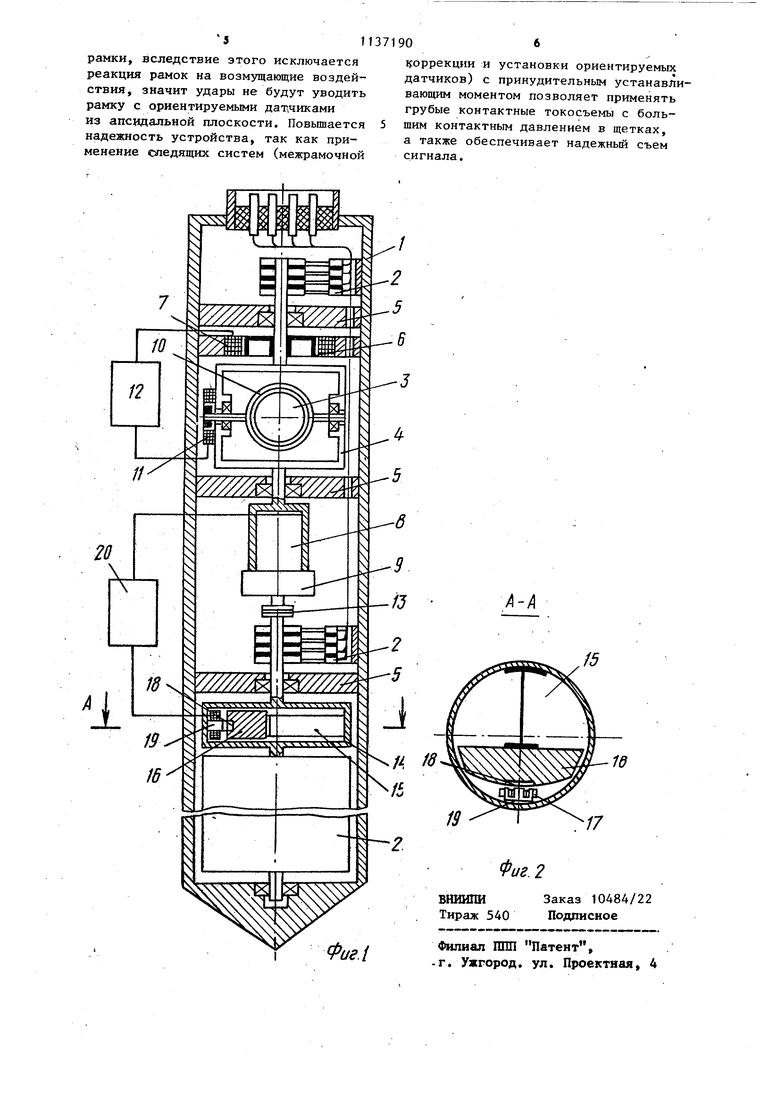
Э Изобретение относится к промысло вой геофизике и может быть использо вано в инклинометрах для ориентации датчиков азимутального и зенитного углов в апсидальной плоскости. Известно устройство для ориентирования датчиков, содержащее цилиндрический корпус, заполненный демпфирующей жидкостью, в которую помещены две соосно установленные на опоpax эксцентричные рамки, на оси одной из рамок установлен контактный токосъем, а на оси другой рамки ориентируемый датчик; рамки электрически соединяются между собой с помощью маломоментного спирального токоподвода, который предохраняется от перекручивания с помощью упоров, установленных на осях рамок Л . Недостатком этого устройства является наличие трения в опорах рамок. Подшипники в спиральном и конТактном токосъемах не позволяют с достаточной степенью ориентироваться датчику в апсидальной плоскости. Известно также устройство, содержащее корпус, две рамки, токосъемы, датчики углов со статором и роторам трехстепенной гироскоп, электродвигатель и узел межрамочнбй коррекции 2 Недостатком данного устройства является зависимость степени демпфирования от изменения температуры, которая приводит, например при повышении температуры с увеличением глубины скважины, к уменьшению вязкости демпфирующей жидкости (масла), т.е. к ухудшению степени демпфирования. При этом собственная частота колебания рамок близка к частоте ударов, испытываемых скважинным прибором, периодическое воздействие которых приводит к уходу рамок из плоскости наклона скважины. Кроме того, устройство характеризуется зависимостью степени демпфирования от величины зенитного угла, так как при этом меняются устанавливающий в апсидальной плоскостнмомен рамок, собственная частота колебания рамок, скорость колебания рамок, что приводит к изменению степени демпфирования. С заданной степенью точности необходимо уменьшать скорость движения скважинного прибора, а это снижает производительность измерения. Целью изобретения является повышекие точности ориентирования углов в скважине. Указанная цель достигается тем, что устройство для ориентирования датчиков в скважине, содержащее корпус, две рамки, токосъемы, датчики углов со статором и ротором, трехстепенной гироскоп, электродвигатель, узел межрамочной ко рекции, снабжено усилителем, пружинным маятником с грузом и понижающим редуктором, при этом на оси трехстепенного гироскопа установлен электродвигатель, выходной вал которого связан через понижающий редуктор с одной из рамок, причем на последней размещен пруяшнный маятник перпендикулярно ее продольной оси, а выходы датчика угла подключены к входам усилителя, и статор одного из датчиков углов соединен с другой рамкой, а ротор с грузом. На фиг. 1 схематично изображено предлагаемое устройство для ориентирования датчиков; на фиг, 2 - разрез А-А на фиг. 1, Устройство содержит цилиндрический корпус 1 с жестко прикрепленными к нему токосъемами 2, трехстепенной гироскоп 3, Ось наружной рамки 4 гироскопа 3 установлена на подвижных опорах 5. На оси укреплены ротор б моментного двигателя 7 и корпус электродвигателя 8 с понижающим редуктором 9. На оси внутренней рамки tO гироскопа 3 укреплён датчик угла 1I, подключенный к усилителю 12, а выход усилителя 12 подключен к обмоткам моментного двигателя 7. Моментный двигатель 7, датчик угла 11 и усилитель 12 образуют узел межрамочной коррекции. Выходной вал редуктора 9 через муфту 13 соединен с рамкой 14, внутри которой установлен пружинный маятник 15 с грузом 16 и датчик 17 угла, ротор 18 которого укреплен на рамке 14, а статор 19 на грузе 16. Выход датчика 17 соединен с входом усилителя 20, выход которого подключен к электродвигателю 8, Ориентируемые датчики 21 соединены с рамкой 14. Муфта 13 устраняет перекос осей редуктора 9 и рамки 14. Устройство работает следующим образом. При подаче питания на устройство внутренняя рамка 10 гироскопа 3 устанавливается в плоскости, перпендикулярной плоскости наружной рамки 14 вследствие наличия системы межрамоч- ной коррекции (датчик угла 11, усилитель 12 и моментный двигатель 7), Изменение плоскости искривления сква жины приводит к отклонению маятника 15 с грузом 16 от положения равновесия, вследствие чего перемещается ротор 18 датчика 17 угла, а это в свою очередь приводит к появлению сигнала .рассогласования на выходе датчика 17. Этот сигнал, рассогласова кия, усиленный усилителем 20, подается на электродвигатель 8, который через понижающий редуктор 9 и муфту 13 вращает рамку 14 до тех пор, пока не исчезнет сигнал рассогласования на выходе датчика 17 угла. Так как рамка 14 соединена с ориентируемыми датчиками 21, то они ориентируются в новой апсидальной плоскости Вследствие вращения прибора в сква- жине на вал наружной рамки 4 гироскопа 3 действует момент, под действием которого внутренняя рамка 10 стремится сложиться с наружной рамкой 4. При этом начинает работать система межрамочной коррекции, на выходе датчика 11 возникает сигнал, который подается на входусилителя 1 а усиленный сигнал с выхода усилителя 12 - на моментный двигатель 7, которьй создает противодействующий момент, в результате чего восстанавливается перпендикулярность-плоскостей наружной 4 и внутренней 10 рамок и сигнал ца. :выходе датчика угла 11 исчезает. Поскольку корпус электродвигателя 8 укреплен на оси наружной рамки 4 гироскопа 3, то при вращении прибора корпус электродвигателя 8 остается неподвижным относител но вращения корпуса 1, тем самым обе печивается нормальная работа следящей системы ориентации датчиков в апсидальной плоскости датчика 17 уг ла (усилитель 20, электродвигатель редуктор 9, муфта 13 и рамка 14). Под действием моментов трения в опо рах, моментов неуравновещенных масс рамок и ротора гироскопа, ось после него начинает прецессировать, в ре- зультате чего внутренняя рамка стре мится сложиться с наружйой рамкой, что приводит к появлению сигнала на выходе датчика угла 11, и начинает работать следящая система межрамочной коррекции. Сигнал с датчика 11, усиленный усилителем 12, подается на моментный двигатель 7, который создает противодействующий момент на валу наружной рамки 4, а это приводит к восстановлению перпендикулярности рамок 4 и 10 и исчезновению сигнала на выходе датчика 11, тем самым ось наружной рамки 4 и корпус электродвигателя 8 остаются неподвижными относительно вращающегося корпуса. Такое выполнение устройства поз.воляет повысить точность о.риентирования датчиков за счет применения следящей системы при установлении ориентируемых- датчиков в апсидальной плоскости, так как в этом случае электродвигатель создает принудительный устанавливающий момент, который преодолевает трение контактного токосъема, а точность установки в апсидальной плоскости определяется высокочувствительным пружинным маятником, который постоянно устанавлигвается следящей системой в нейтральное положение. Повышается производительность измерения за счет увеличения скорости движения прибора в скважине, а это,в свою очередь,достигается повышением качества демпфирования: во-первых, высокочастотные колебания, образующиеся в пружинном маятнике в результате ударов прибора при движении в скважине, отфильтровываются следящей системой к не влияют на рамку с ориентируемыми датчиками, а низкочастотные колебания демпфируются гироскопом, так как в этом случае вступает в действие следящая система межрамочной коррекции; во-вторых, исключается зависимость степени демпфирования от температуры, так как отсутствует демпфирующая жидкость, а также зависимость степени демпфирования от величины зенитного угла, так как работа следящих систем, осуществляющих демпфирование, не зависит от величины зенитного угла. Кроме того, демпфирование улучшается из-за того, что рамки имеют незначительную неуравновешенную массу, только небольшой груз пружинного маятника, который можно скомпенсировать, установив такой же дополнительный груз снаружи
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Преобразователь зенитного угла | 1981 |
|
SU1002548A1 |
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1983 |
|
SU1141187A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| СПОСОБ ИЗМЕРЕНИЯ АЗИМУТОВ | 1970 |
|
SU259775A1 |
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1970 |
|
SU282223A1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
УСТРОЙСТВО .ДЛЯ ОРИЕНТИ ОВАНИЯ ДАТЧИКОВ В СКВАЖИНЕ, содержащее корпус, две рамки, токосъемы, датчики углов со статором и ротором, трёхстепенной гироскоп, электродвигатель, узел межрамочной коррекции, о т л и ч аю щ е a с я тем, что, с повышения точности ориентирования углов в скважине, оно снабжено усшштелем, пружинным маятником с грузом и понижающим редуктором, при этом на оси трехстепенного гироскопа установлен электродвигатель, выходной вал которого связан через понижающий редуктор с одной из рамок, причем на последней размещен |фужинный маятник перпендикулярно ее продольной оси, a выходы датчика угла подключены к входам усилителя, и статор одного 5 из датчиков углов соединен с другой рамкой, a ротор - с грузом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вибронесущая опора | 1975 |
|
SU781429A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
