Изобретение относится к аналогов вычислительной технике. . Известно вычислительное устройств для определения углов, работающее от датчиков синуса и косинуса угла 13 Работа устройства основана на вычислении синуса угла в четыре раза меньше измеряемого. В линейной зоне когда sinp J обратные пересчет к измеряемому углу осуществляется с по мощью масштабирующего элемента. Недостатком устройства является малая точность и сложная структура. Погрешность определения угла возрастает с увеличением измеряемого угла Наиболее близким по технической сущности к предлагаемому является устройство для вычисления углов, содержащее датчики синуса и косинуса угла, выходы которых подключены соот ветственно к первому и второму входам блока приближенного вычисления углов, содержащего сумматор, первый, второй и третий масштабирующие элементы блок умножения и блок извлечения кубического корня причем первый вход блока приближенного вычисления углов через первый масштабирующий элемент соединен с первым входом сумматора, второй вход блока приближенного вычисления углов соединен с первым входом блока умножения, выход которого соединен с вторым входом сумматора, выход которого через второй масштабирующий элемент подключен к входу блока извлечения кубического корня, выход которого яв ляется выходом устройства и подключен к второму входу блока умножения, входу третьего масштабирующего элемента, выход которого соединен с тре тьим входом сумматора.
Такое устройство характеризуется повышенной точностью определения угла при упрощении структуры.Точность определения угла достигается структурной реализацией приближенной формулы, получающейся разложением функций синуса и косинуса в ряд Маклорена.
Однако с увеличением измеряемого 50 угла возрастает погрешность устройства.
Целью изобретения является повышение точности.55
Цель достигается тем, что устройство для вычисления углов, содержащее датчики синуса и косинуса угла и блок
Sinoi cos( , C05ot, 5in(-|--od|,
Этим достигается снижение погрешности приближенных вычислений.
В зависимости от соотношения синуса измеряемого угла и порога срабатывания компаратора 6, установленного равным , коммутатор 4 соединяет датчики синуса 1 и косинуса 2 с блоком 3 в прямом или в обратном порядке, а коммутатор 5 подключает к выходу выходной сигнал блока 3 или сигнал с выхода сумматора 7. приближенного вычисления углов, содержит первый и второй коммутаторы, сумматор и компаратор, при этом выходы датчиков синуса и косинуса через первый коммутатор соединены с первым и вторым входами блока приближенного вычисления углов, выход которого соединен с первыми входами второго коммутатора и сумматора, второй вход которого подключен к шине первого опорного напряжения, а выход - к второму входу второго коммутатора, выход которого ягияется выходом устройства, выход датчика синуса соединен с первым входом компаратора, шина второго опорного напряжения соединена с вторым входом компаратора,выход компаратора соединен с управляющими входами коммутаторов. На чертеже представлена схема устройства. Устройство содержит датчики синуса 1 и косинуса .2 угла, блок 3- приближенного вычисления углов, коммутаторы 4 и 5, компаратор 6, сумматор 7. Выполнение блока 3 может быть различным; известны разнообразные технические решения, осуществляющие переход от функций синуса и косинуса угла к углу. Блок 3 содержит масштабирующие блоки 8-10, блок 11 умножения, сумматор 12, корнеизвлекатель 13. Позициями 14 и 15 обозначены шины опорных напряжений устройства. Устройство работает следующим образом. В устройстве реализуется вычисление угла в.первом октанте по значениям синуса и косинуса вычисляемого угла, а при переходе у1ла во второй октант устройство оперирует с дополнительными углами
3. 11032484
Назначение сумматора 7 - переход Предложенное устройство обладает от вычисленного дополнительного угла повьпиенной точностью при незначительк прямому. .нь1х аппаратурных затратах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления угла | 1979 |
|
SU830416A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Устройство для выполнения обратных тригонометрических преобразований | 1985 |
|
SU1256051A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1751850A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1709525A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Функциональный преобразователь угла поворота вала в код | 1982 |
|
SU1080174A1 |
| Многоканальный преобразователь угла поворота вала в код | 1983 |
|
SU1120383A1 |
| Преобразователь сигналов синусно-косинусного датчика угла в код | 1982 |
|
SU1034059A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1758875A1 |
УСТРОЙСТВО ДЛЯ ШЧИСЛЕНИЯ УГЛОВ, содержащее датчики синуса и косинуса угла и блок приближенного вычисления углов, о тличающее с я тем, что, с целью повьпиения точности, устройство содержит первый и второй, коммутаторы, сумматор и компаратор, при этом выходы датчиков синуса и косинуса угла через первый коммутатор соединены с первым и вторым входами блока приближенного вычисления углов, выход которого соединен с пepвы al входами второго коммутатора и сумматора, второй вход которого подключен к шине первого опорного напряжения, а выход - к второму входу второго коммутатора, выход которого является выходом устройства, выход датчика.синуса угла соединен с первым входом компаратора, шина второго опорного напряжения соединена с вторым входом компаратора, выход компаратора соединен с управляющими вхо- g дами коммутаторов. (Л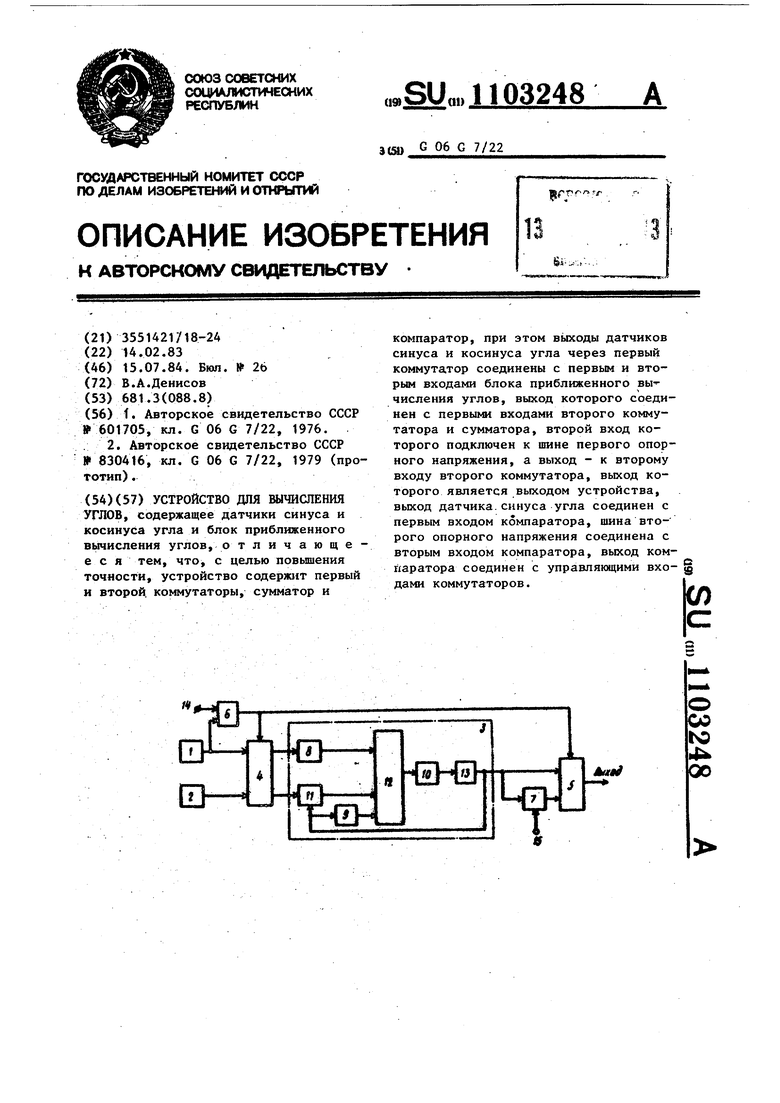
| t | |||
| Вычислительное устройство для определения углов | 1976 |
|
SU601705A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для вычисления угла | 1979 |
|
SU830416A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
