Изобретение, относится к аналоговой вычислительной технике и электрическим/измерительным устройствам.
Известно устройство для определения.углов, содержащее датчики синуса и косинусаугла, сумматор, к первому входу которого подключен источник постоянного напряжения, и блок деления, к первому входу которого подключен датчик синуса угла, а выход блока деления связан с масштабирующим элементом.
Работа устройства основана на вычислении тригонометрической функцииполовинного угла, которая имеет . соответственно большую-линейность ДД
Недостаток этого устройства - ограниченййя зона линейности, лишь вдвое превышающая линейность .датчиков.
Наиболее флизким по технической сущности и достигаемому результату.: к предлагаемому является устройство для вычисления угла, содержащее датчики синуса и косинуса угла, ciyMKfaтор, к первому входу которого, подключено постоянное напряжение, блок деления-, блок умножения, два квгодратора, два масштабирующих элемента, инвертор и косинусный преобразователь, причем датчик косинуса угла через инвертор связан со вторым входом сумматора, выход блока деления . через первый масштабирующий элемент подключен к выходу устройства, а через косинусный, преобразователь подключен -к первому входу блока умножения и входу первого квадратора, выход которого соединен со входом второго квадратора, выход которого через второй масштабирующий элемент подключен к третьему вхоДу сумматора, выход которого подключен ко второму входу блока умножения, выхо блока умножения подключен ко второму входу блока деления, первый вход которого подключен к датчику синуса угла.
Работа этого устройства основана на вычислении синуса угла ,. в 4 рза меньшего измеряемого угла ot , . по формуле:
. 9тя
{rcos |S-tQsdL-i)cosp,
В устройстве расширен диапазон линейности L2T
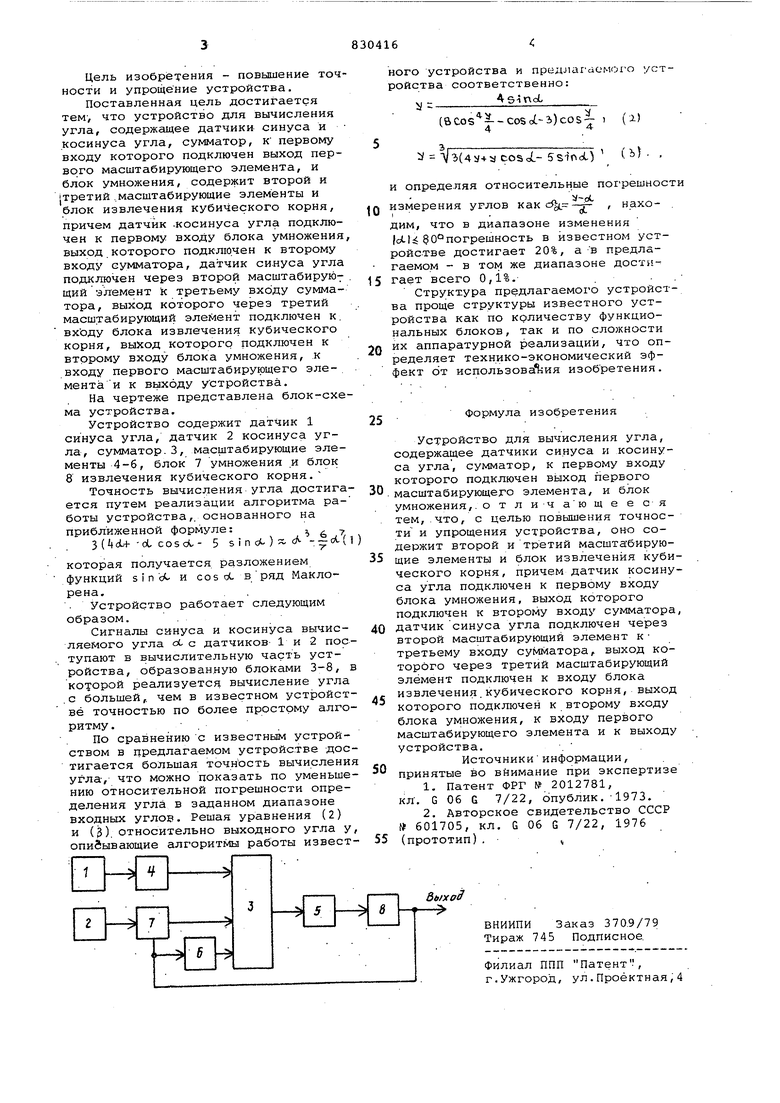
Недостатки этого устройства - малая точность определения угла и сложная структура. Цель изобретения - повышение точ ности и упрощение устройства. Поставленная цель достигается тем что устройство для вычисления угла, содержащее датчики синуса и косинуса угла, сумматор, к первому входу которого подключен выход первого масштабирующего элемента, и блок умножения, содержит второй и третий.масштабирующие элементы и блок извлечения кубического корня, причем датчик .косинуса угла подключен к первому входу блока умножения выход которого подключен к второму входу сумматора, датчик синуса угла подключен через второй масштабирую щийэлемент к третьему входу сумматора, выход которого через третий масштабирующий элемент подключен к. входу блока извлечения кубического корня, выход которого подключен к второму входу блока умножения, к входу первого масштабирующего элемента и к выходу устройства. На чертеже представлена блок-схе ма устройства. Устройство содержит датч:ик 1 синуса угла, датчик 2 косинуса угла, сумматор.3, масштабирующие элементы 4-6, блок 7 умножения и блок 8 извлечения кубического корня. Точность вычисления угла достига ется путем реализации алгоритма работы устройства,, основанного на приближенной формуле: ь б SCtflU-oLcosdl- 5 sinot-) - ( которая получается разложением функций S i п ЬС и созЫ. вряд Маклорена. Устройство работает следующим образом. . Сигналы синуса и косинуса вычисляемого угла о с датчиков- 1 и 2 пос тупают в вычислительную часть устройства, образованную блоками 3-8, которой реализуется вычисление угла .с большей,, чем в известном устройст ве точностью по более простому алго ритму. . По сравнению с известным устройством в предлагаемом устройстве дос тигается большая точнЪсть вычислени угла, что можно показать по уменьше нию относительной погрешности определения угла в заданном диапазоне входных углов. Решая уравнения (2) и (3), относительно выходного угла у опийывающие алхоритмы работы извест ного устройства и преллагаомогО устройства соответственно: v -As-inoL (acos -cosot--3,)cos 1 (i) 4 - ( cosoL- SsiroL) (ьЬ . и определяя относительные погрешности измерения углов как с%- , находим, что в диапазоне изменения lotl 8 0 по грешность в известном устройстве достигает 20%, а в предлагаемом - в том же диапазоне дости-гает всего 0,1%. . . . Структура предлагаемого устройства проще структуры известного устройства как по количеству функциональных блоков, так и по сложности их аппаратурной реализации, что определяет технико-экономический эффект от иcпoльзoвa kия изобретения. Формула изобретения Устройство для вычисления угла, содержащее датчики синуса и косинуса угла, сумматор, к первому входу которого подключен выход первого масштабирующего элемента, и блок умножения,, о т л ич ающ е е ся тем,.что, с целью повышения точности и упрощения устройства, оно содержит второй и третий масштабирующие элементы и блок извлечения кубического корня, причем датчик косинуса угла подключен к первому входу блока умножения, выход которого подключен к второму входу сумматора, датчик синуса угла подключен через второй масштабирующий элемент к третьему входу сумматора, выход которого через третий масштабирующий элемент подключен к входу блока извлечения кубического корня, выход которого подключен к второму входу блока умножения, к входу первого масштабирующего элемента и к выходу устройства. Источникиинформации, принятые во вйимание при экспертизе 1.Патент ФРГ № 2012781, кл. G 06 G 7/22, Ьпублик. 1973. 2.Авторское свидетельство СССР 601705, кл. G 06 G 7/22, 1976 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления углов | 1983 |
|
SU1103248A1 |
| Вычислительное устройство для определения углов | 1976 |
|
SU601705A1 |
| Устройство для измерения симметричных составляющих напряжений трехфазной сети | 1989 |
|
SU1725166A1 |
| Устройство для измерения симметричных составляющих напряжений трехфазной сети | 1990 |
|
SU1781642A1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ГАРМОНИКИ НАПРЯЖЕНИЯ | 1990 |
|
RU2030753C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523186C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2522855C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523187C1 |
| Устройство для ввода информации | 1980 |
|
SU955007A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
