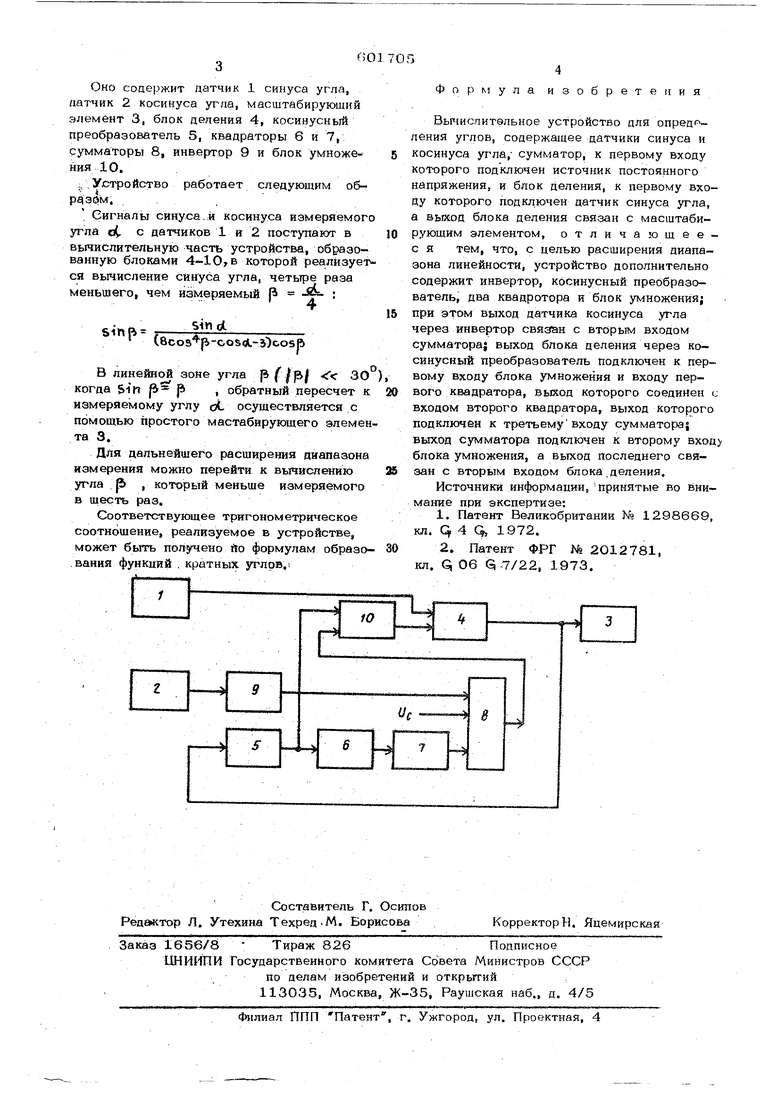
Оно содержит датчик 1 синуса угла, натчик 2 косинуса угла, масштабирующий элемент 3, блок деления 4, косинусный преобразователь 5, квадраторы 6 и 7, сумматоры 8, инвертор 9 и блок умножения 10. ./Устройство работает следующим обpai36M.. Сигналы синуса, и косинуса измеряемог угла «зС с датчиков 1 и 2 поступают в вьгчислительную часть устройства, образованную блоками 4-10, в которой реализует ей вычисление синуса угла, четьтре раза меньшего, чем измеряемый Р ; .sin d (8сов { -со5Л-з)со5В В линейной зоне угла р Г/Р| когда &1П р р , обратный пересчет к измеряемому углу ot осуществляется с помощью простого мастабирующего элеме та 3. Для дальнейшего расширения диапазона измерения можно перейти к вычислению угла ;р , который меньше измеряемого в шесть раз. Соответствующее тригонометрическое соотношение, реализуемое в устройстве, может быть получено fto формулам образо .вакия функций . кратных углов/ Формула изобретения Въиислительное устройство для определения углов, содержащее датчики синуса и косинуса угла,- сумматор, к первому входу Которого подключен источник постоянного напряжения, и блок Деления, к первому входу которого подключен датчик синуса угла, а БЬКОД блока деления связан с масштабирующим элементом, отличающеес я тем, что, с целью расширения диапазона линейности, устройство дополнительно содержит инвертор, косинусный преобразователь, два квадротора и блок умножения; при этом выход датчика косинуса угла через инвертор связан с вторым входом сумматора} выход блока деления через косинусный преобразователь подключен к первому входу блока умножения и входу первого квадратора, выход которого соединен с входом второго квадратора, выход которого подключен к третьемувходу сумматора} выход сутиматора подключен к второму вход блока умножения, а выход последнего связан с вторым входом блока .деления. Источники информации,принятые во внимание при экспертизе; 1. Патент Великобритании № 1298669, кл. Q 4 О, 1972. 2 Патент ФРГ № 2О12781, кл. q 06 «5-7/22, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления угла | 1979 |
|
SU830416A1 |
| Устройство для ввода информации | 1980 |
|
SU955007A1 |
| Электрогидравлический следящий привод робота | 1989 |
|
SU1723360A1 |
| Устройство для моделирования качки | 1986 |
|
SU1334168A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ ДАТЧИКОВ УГЛОВ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КВАТЕРНИОНЫ | 2020 |
|
RU2747672C1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Устройство для измерения симметричных составляющих напряжений трехфазной сети | 1989 |
|
SU1725166A1 |
| Устройство для вычисления углов | 1983 |
|
SU1103248A1 |
| Имитатор морского волнения | 1981 |
|
SU1116440A2 |
