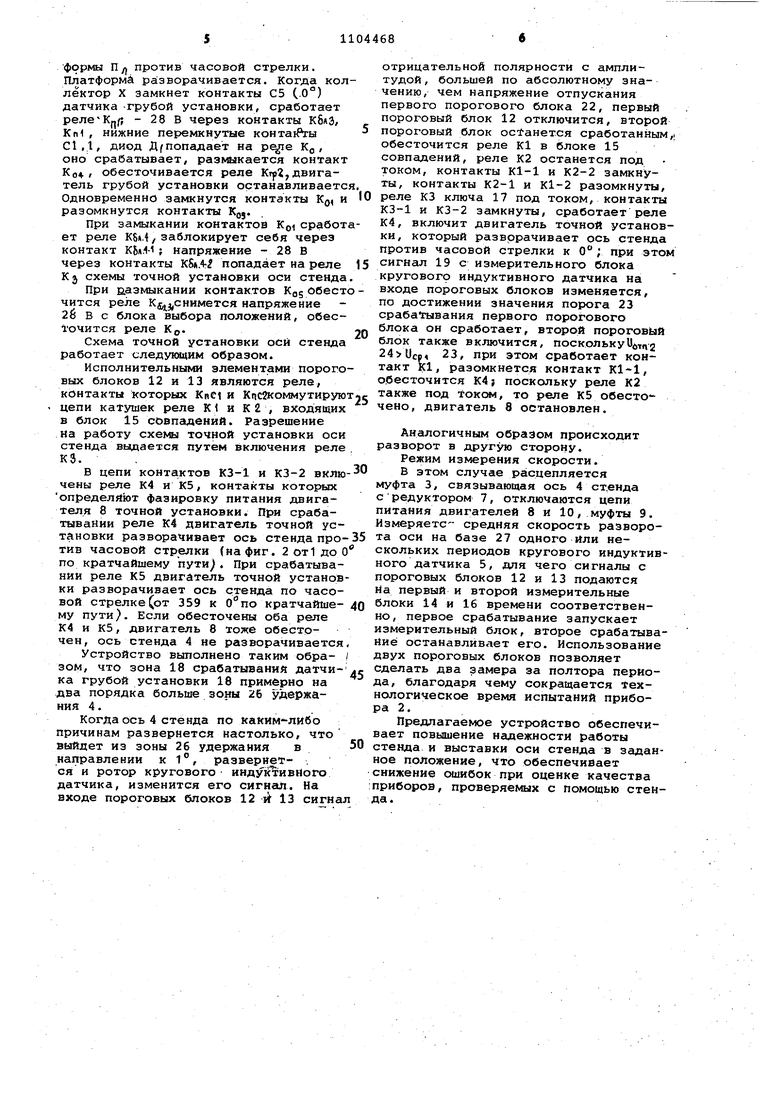
Изобретение относится к автомати ке и измерительной технике и предназначено для программного управления разворотом оси поворотного стенда и Измерения скорости разворота этой оси. Известно устройство управления развотором оси стенда, соде)жащее электропривод, закрепленну о на осно эаНии раму с подшипниками, в которы с возможностью свободного вращения установлен поворотный узел(многогра ник) , плоские пружины, связанные с рамой и основанием, два ролика, пер вый из которых свободно установлен на раме, а ва;орой жестко закреплен на поворотном узле, и кулачки подъе ма рамы J1 поворотного узла, установ ленные соответственно роликам на приводном валу и связанные с ними, включение и отключение электропривода с редуктором осуществляется контактным устройством, управляемым от кулачка, связанного с осью привод ного вала ij . Однако данное устройство не обладает высокой достоверностью в задани угла, потому- что точность выставки поворотного узла относительно основа ния определяется сопряжением опорных плоскостей основания и поворотного узла и износ опорных плоскостей, их повреждение, коррозия, попа,цание между ними посторонних частицСпыли, продуктов износа кинематических цепей стенда вызывают ошибку в ориентации поворотного узла относительно основания. Кроме того, при увеличении количества ориентации (более четырех) возрастает сложность стенда, а при сохранении габаритов уменьшается точность вставки поворотного узла относительно основания из-за умень шения базы опорных плоскостей. Наиболее близким к предлагаемому по технической сущности является устройство программного управления поворотным столом, содержащее круговой индуктивный датчик, двухдвигательный привод грубой и точной установки оси, разомкнутую систему программного управления, ключ, пороговую схему и механизм внуТриградусного деления, один из выходов разомкнутой цепи системы програгимногр управления подключен к разрешающему вход ключа к запрещающему входу которого подсое динен выход пороговой схемы, соединенной с выходом кругового индуктивного датчика, а вход одного из щаговых двигателей через ключ подсоединен к соответствующему выходу разомкнутой системы программного управления 2J . Недостатком известного устройства является то, что в нем грубая установка оси в заданные положения осуществляется без обратной связи с помощью шагового двигателя, управляемого разомкнутой системой программного управления, которая имеет значительную .сложность, поскольку содержит специальный датчик импульсов, счетчики импульсов, логические схемы и другие узла, а все устройство из-за отсутствия обратной связи имеет недостаточно высокую достоверность оси в заданные положения. Цель изобретения - повышение точности установки оси стенда в заданное положение. Цель достигается тем, что в устройство для программного управления осью поворотного стенда, содержащее последовательно соединенные блок выбора положений, двигатель грубой установки,муфту переключения двигателей и редуктор, соединенный с осью поворотного стенда, второй выход блока выбора положений соединен с управляющим входом ключа, выходом соединенного с двигателем точной установки, и последовательно соединенные круговой индуктивный датчик,измерительный блок кругового индуктивного датчика и первый Пороговый блок, ротор кругового индуктивного датчика связан с осью поворотного стенда, введены муфта для отключения привода от оси стенда, первый и второй измерительные блоки, датчики грубой установки стенда, соединенные выходами соответственно с входами блока выбора положений, третьим выходом соединенного с вторым входом муфты переключения двигателей, третий вход которой соединен с валом двигателя точной ycTaHOBkH, последовательно соединенные второй пороговый блок и блок совпадений, Первый и второй выходы которого соединены соответственно с первым И вторым информационными входами ключа, второй вход - с первым выходом первого порогового блока, соединенного вторым выходом с входом первого измерительного блока, второй выход второго порогового блока соединен с входом второго Измерительного блока, второй выход измерительного блока кругового индуктивного датчика соединен с входом второго порогового блока. На фиг. 1 представлена функциональная схема устройства; на фиг.2диаграммы работы датчиков и пороговых блоков; на фиг. 3 - упрощенные схемы блока выбора положений и управления двигателем точной установки. Устройство содержит датчик 1 грубой установки, испытываемый на стенде прибор 2, муфту 3 для отключения привода от оси стенда, ось 4 стенда, круговой индуктивный датчик 5, блок б выбора положений, редуктор 7, двигатель 8 точной установки, муфту 9 переключения двигателей, двигатель 10 грубой установки, измерительный блок 11 кругового индуктивного датчика, первый 12 и второй 13 пороговы блоки, первый измерительный блок 14 блок 15 совпадений, второй и змерительный блок 16, ключ 17, зону 18 срабатывания, датчика грубой установ ки,сигнал 19 кругового индуктивного датчика на выходе его измерительног блока , зону 2.0 срабатывания первог порогового блока, зону 21 срабатывания второго пороговото блока, напряжение 22 отпускания первого порогового блока Ugtmнапряжение 23 срабатывания первого порогового блока UCP, , напряжение 24 отпускания второго порогового блока Нотп 2/напря жение 25 срабатывания второго порог вого блока ИсрзгЗону 26 удержания оси базу 27 измерения средней скорости разворота оси, поворотную платформу Пд, закрепленную .на оси стенда, кнопочные переключатели С1 - СЗ (с зависимой фиксацией) Зс1дания поло жений стенда, кнопку С4 (без фиксации включения разворота оси стенда, кон такты С5 - С7 датчиков грубой установки, коллектор X датчиков гру бой установки, который перемыкает контакты С5 или С6, или С, реле Khl - КчЗ положений, реле Ко остановки двигателя грубой установки , pejte Kfj. включения двигателя грубой установки для вращения оси 4 стенда по часовой стрелке - от положения О к положению 45° по кратчайшему пути, реле К(2 включения двига теля грубой установки для вращения оси стенда против часовой стрелки, реле и блокировки для сохранения цеди - 28 В при размыкании контактов реле положений, реле Y блокировки для сохранения Цепи 28 В после отпускания кнопки С4 с задерж кой на отпускание , реле блокировки для подачи команды на открывание ключа 17 (переключения муфты 9) и для запоминания этой команды, реле kf для подачи команды на закры вание ключа 17(обратного переключения муфты 9), развязывающие диоды Д1-Д10. Устройство работает следующим образом. Режим разворота.. В исходном положении ось 4 стенд находится в одном из фиксированных положений, при этом круговой индуктивный датчик 5 находится в зоне 26 удержания, срабатывают оба порог вых блока 12 и 13 и один из датчиков 1 грубой установки, его сигнал положения оси подается на блок 6 выбора положений, двигатели 8 и 10 обесточены. При получении задания блок выбора положения подключает выбранный датчик 1 грубой установки заданного положения, подключает муфту 9 к двигателю 10,грубой уста новки, включает его в нужном направлении, выдает запрет на ключ 17, двигатель 10 через муфту 9 и редуктор 7 разворачивает ось в направлении к выбранному датчику грубой установки заданного положения, в зоне 18 срабатывания этого датчика блок 6 выбора положения подключает муфту 9 к двигателю 8 точной установки, выдает команду на отпирание ключа 17, на двигатель точной установки 8 подается управляющее напряжение с ключа 17 такой фазы, чтобы развернуть индуктивный датчик 5 к нулевому сигналу, направление вращения. двигателя 8 определяется срабатыванием одного из пороговых блоков 12 или 13 в зависимости от полярности сигнала индуктивного датчика. Пороговые блоки 12 и 13 разнополярны и настроены таким образом, что у каждого порогового блока напряжения 22 и 24 отпускания имеют обратную полярность по отношению к напряжениям 23 и 25 срабатывания . , при этом UOTJ,,, Чсрл; Uerrt.sUcp., (фиг. 2). Благодаря этому в зоне нулевого сигнала индуктивного датчика в зоне 26 удержания оси обязательно срабатывают оба пороговых блока, в этом случае срабатывает блок 15 совпадений, который разрывает цепи, идущие на ключ 17, прекращается подача управляющего напряжения на двигатель точной установки, рсь стенда останавливается. Если же по каким-либо причинам ось развернется настолько, что сигнал индуктивного датчика превысит напряжение отпускания одной из пороговых схем, то этот пороговый блок отключится, блок. 15 совпадение передаст сигнал с включенного порогового блока на ключ 17, который в соответствии с полученным сигналом задаст направление вращения для разворота оси в зону 26 удержания. Блок выбора положений(фиг. 3) работает следующим образом. Исходное положение, например, 45. Замкнуты контакты С6, сработало реле Knj замкнут контакт реле KO обесточено. Необходимо развернуть платформу П стенда, например в положение О . Для этого нажимают и фиксируют в нажатом положении кнопку CI (, нажимают и отпускают кнопку С4. Срабатывает и блокируется через свой контакт реле КблЗ, напряжение - 28 В через контакты KS(j3H Кп2, диод Д7, через перемкнутые нижние контакты Ct,3, через контакт Ко4попадает на реле KtpO, оно срабатывает и своими контактами включает двигатель грубой установки для вращения платформы П д против часовой стрелки. Платформа разворачивается. Когда коллектор X замкнет контакты С5 (.0°) датчика грубой установки, сработает релеК /; - 28 В через контакты КблЗ/ Кп1 , нижние перемкнутые контаЛ ы Cl.t, диод flfпопадает на К, оно срабатывает, разлвлкается контакт Ко4/ обесточивается реле Ктр2,двигатель грубой установки останавливаетс Одновременно замкнутся контакты К, и разомкнутся контакты .
При замыкании контактов KQI сработет реле KS.4, заблокирует себя через контакт КЬиЛ- ; напряжение - 28 В через контакты KS.4-f попадает на реле Kj схемы точной установки оси стенда
При иазмыкании контактов Kggобестчится реле К снимется напряжение 2б В с блока выбора положений, обесТочится реле К.
Схема точной установки оси стенда работает следующим образом.
Исполнительнылш элементами пороговых блоков 12 и 13 являются реле, контакты которых Knci и КпсЗкоммутирую цепи катушек реле К и К2 , входящих в блок 15 совпадений. Разрешение на работу схеьвл точной установки оси стенда выдается путем включения реле КЗ.
в цепи конта.ктов КЗ-1 и КЗ-2 вклю чены реле К4 и К5, контакты которых определяют фазировку питания двигателя 8 точной установки. При срабатывании реле К4 двигатель точной установки разворачивает ось стенда против часовой стрелки на фиг. 2 от 1 до О по кратчайшему пути). При срабатывании реле К5 двигатель точной установки разворачивает ось стенда по часовой стрелке(от 359 к кратчайшему пути). Если обесточены оба реле К4 и К5, двигатель 8 тоже обесточен, ось стенда 4 не разворачивается
Устройство выполнено таким образом, что зона 18 срабатывания датчика грубой установки 18 примерно на два порядка больше зоны 26 удержания 4.
Когда ось 4 стенда по каким-либо причинам развернется настолько, что выйдет из зоны 26 удержания в направлении к 1, развернет- СЯ и ротор кругового ИНДУ1(ТИВНОГО
датчика, изменится его сигнал. На входе пороговых блоков 12 -vt 13 сигна
отрицательной полярности с амплитудой, большей по абсолютному значению, чем напряжение отпускания первого порогового блока 22, первый пороговый блок 12 отключится, второй пороговый блок останется сработанным обесточится реле К1 в блоке 15 совпадений, реле К2 останется под током, контакты К1-1 и К2-2 замкнуты, контакты К2-1 и К1-2 разомкнуты, реле КЗ ключа 17 под током, контакты КЗ-1 и КЗ-2 замкнуты, сработает реле К4, включит двигатель точной установки, который развррачивает ось стенда против часовой стрелки к 0°; при это сигнал 19с измерительного блока кругового индуктивного датчика на входе пороговых блоков изменяется, по достижении значения порога 23 срабатывания первого порогового блока он сработает, второй пороговый блок также включится, посколькуU nj 23, при этом сработает контакт К1, разомкнется контакт К1-1, о.бесточится К4; поскольку реле К2 также под током, то реле КБ обесточено, двигатель 8 остановлен.
Ансшогичным образом происходит разворот в другую сторону.
Режим измерения скорости.
В этом случае расцепляется муфта 3, связывающая ось 4 ст.енда с редуктором 7, отключаются цепи питания двигателей 8 и 10/ муфты 9. Измеряете- средняя скорость разворота оси на базе 27 одного или нескольких периодов кругового индуктивного датчика 5, для чего сигналы с пороговых блоков 12 и 13 подаются На первый и второй измерительные блоки 14 и 16 времени соответственно, первое срабатывание запускает измерительный блок, второе срабатывание останавливает его. Использование двух пороговых блоков позволяет сделать два замера за полтора периода, благодаря чему сокращается технологическое время испытаний прибора 2.
Предлагаемое устройство обеспечивает повышение надежности работы стенда и выставки оси стенда в заданное положение, что обеспечивает снижение ошибок при оценке качества ;приборов, проверяемых с помощью стенда.

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU771616A1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU372544A1 |
| Стенд для испытания фотоаппаратов | 1989 |
|
SU1749883A1 |
| Автоматическое весовое дозирующее устройство | 1961 |
|
SU150260A1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Устройство для измерения диаграммы направленности антенны | 1986 |
|
SU1786451A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ КЛАПАНАМИ ПОДАЧИ ТОПЛИВА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2072440C1 |
| Система для управления и контроля привода гравиметра | 1980 |
|
SU954924A1 |
| Устройство для приема команд телеуправления | 1990 |
|
SU1781687A2 |

УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ОСЬЮ ПОВОРОТНОГО СТЕНДА, содержащее последовательно соединенные блок.выбора положений, двигатель грубой установки, муфту переключения двигателей и редуктор, соединенный с осью поворотного стенда, второй выход блока выбора положений соединен с управляющим входом ключа, выходом соединенного с двигателем точной установки, и последовательно соединенные круговой чадуктивный датчик, измерительный блок кругового индуктивного датчика и первый пороговый блок, ротор кругового индуктивного датчика связан с осью поворотного стенда, отличающееся тем, что, с целью повышения точности установки оси стенда в заданное положение, в него введены муфта для отключения привода от оси стенда, первый и второй измерительные блоки, датчики грубой установки стенда, соединенные выходами соответственно с входами блока выбора положений, третьим выходом соединенного с вторым входом муфты переключений двигателей, третий вход которой соединен с валом двигателя точной установки, последовательно соединенные второй пороговый блок и блок совпс1дений, первый и второй выходы которого соединены соответственно t первым и вторым информационными входами ключа, второй вход - с первЬм выСО ходом первого порогового блока,соединенного втоЕЯлм выходом с входом первого измерительного блока, второй выход второго порогового блока соединен с входом второго измеритель«ого блока, второй выход измерительного блока кругового индуктивного датчика соединен с входом второго порогового блока. 4 3) ЭО
JS9
О /5
/
Угол разворота
оси tf
Л8
Ю
5
2ff
r2f
f
/f/
IL
Z7 Задание положении Выключение f fKoUdfoma i. / tft I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Испытательный стенд | 1976 |
|
SU623182A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ | 0 |
|
SU372544A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
