Предлагаемое изобретение относится к мелиоративным машинам, а именно к механизмам управления поворотом гусеничного движителя машин.
Известен механизм управления поворотом мелиоративной гусеничной машины, содержащий гидромеханический привод управления бортовыми фрикционами с подпружиненными нажимными элементами, включающий в себя гидроцилиндр управления, полости которого связаны с источником давления рабочей жидкости, и привод управления тормозами, содержащий управляющий элемент 1.
Недостатками такой системы управления поворотом являются сложность изготовления, множество сложных и мелких деталей требует частых и весьма точных регулировок, низкая эффективность.
Целью изобретения является повышение эффективности путем обеспечения раздельного управления тормозами обеих гусениц от одного управляющего элемента.
Указанная цель достигается тем, что в механизме управления поворотом мелиоративной гусеничной машины, содержащем гидромеханический привод управления бортовыми фрикционами с подпружиненными нажимными элементами, включающем в себя гидроцилиндр управления, полости которого связаны с источником давления рабочей жидкости, и привод управления тормозами, содержащий управляющий элемент, гидромеханический привод управления бортовыми фрикционами снабжен поворотной траверсой, установленной на оси, закрепленной на раме ме«тиоративной гусеничной машины, подпружиненными толкателями и рычагами, при это.м каждое плечо упомянутой траверсы связано со штоком гидроцилиндра управления и через подпружиненный толкатель и рычаг - с подпружиненным нажимным элементом бортового фрикциона, а привод управления тормозами выполнен пневматическим и включает в себя тормозной комбинированный кран, механически управляемый гидроаппарат, исполнительные пневмоцилиндры и пневматический источник давления, при этом управляющий элемент привода управления тормозами кинематически связан с тормозным комбинированным краном, а пневматический источник давления через упомянутый комбинированный кран, механически управляемый гидроаппарат пневмолиниями соединен с исполнительными пневмоцилиндрами, щтоки которых кинематически связаны с тормозами, причем орган управления гидроаппарата кинематически связан с одним из плеч траверсы.
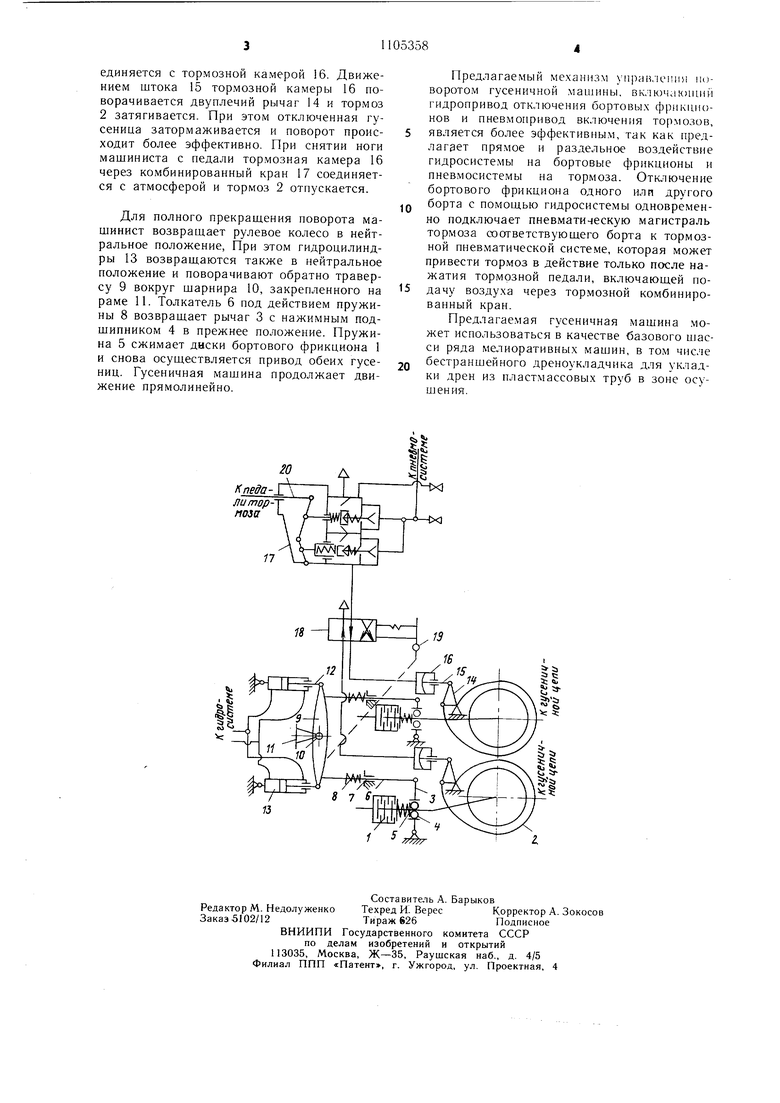
На чертеже изображена принципиальная схема предлагаемого механизма управления поворотом.
Механизм управления поворотом гусеничной машины содержит бортовые фрикционы 1 и ленточные тормоза 2, установленные попарно в приводе каждой гусеницы. Рычаги 3 через нажимные подшипники 4 поджимают диски фрикционов 1 под воздействием пружин 5. С рычагами 3 связаны толкатели б, установленные в направляющих 7 и удерживаемые в нейтральном положении пружинами 8. Толкатели 6 упираются в поворотную траверсу 9, закрепленную
0 шарниром 10 на раме И гусеничной машины. Концы траверсы 9 соединены со штоками 12 гидроцилиидров 13, закрепленных на раме 11 и соединенных с гидросистемой управления поворотом базового трактора. Соосно с бортовыми фрикционами 1 закреп лены ленточные тормоза 2, связанные через двуплечие рычаги 14 со штоками 15 тормозных камер 16. Тормозные камеры 16 соединены с тормозной пневмосисте.мой через комбинированный кран 17 посредством
0 кранового распределителя 18, рычаг 19 управления которого связан с поворотной траверсой 9. Тяга 20 комбинированного тормозного крана 17 соединена с тормозной педалью в кабине машиниста. Гидроцилиндры 13 соединены с гидросистемой через гид роусилитель базового трактора, связанный с валом рулевого колеса.
При прямолинейном движении гусеничной машины гидравлическая и пневматическая системы механизма управления поQ воротом отключены, гидроцилиндры 13 и 16 находятся в нейтральном положении.
При необходимости изменения курса движения машины машинист поворачивает рулевое колесо в соответствующую сторону, тем самым через гидроусилитель включая в работу гидроцилиндры 13 один вперед на выдвижение штока 12, другой - назад на втягивание. При этом поворачивается траверса 9 вокруг шарнира 10, закрепленной на раме 11 гусеничной машины. Поворачиваясь, траверса 9 нажимает на соответствующий толкатель 6, установленный в направляющей 7, сжимает пружину 8 и поворачивает рычаг 3 совместно с нажимным подшипником 4, который опускает пружину 5, и контакт между диками бортового фрикциона I прекращается. Таким образом, привод данной гусеничной цепи отключается и начинается поворот машины в ее сторону. Одновременно поворотом траверсы 9 перемещается рычаг 19 управления
0 кранового распределителя 18 таким образом, что при этом комбинированный тормозной кран 17 соединяется с тор.мозной камерой 16 того же борта. В случае необходимости более крутого поворота машинист в кабине нажимает педаль тормоза, кото5 рая тягой 20 соединена с комбинированным тормозным краном 17. При этом пневмосистема через комбинированный тормозной кран 17 и крановый распределитель 18 со
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота гусеничнойМАшиНы | 1978 |
|
SU802118A1 |
| Гидрообъемная трансмиссия гусеничной машины | 1983 |
|
SU1117245A1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |
| БРОНЕТРАНСПОРТЕР | 2007 |
|
RU2369825C2 |
| МОСТ ВЕДУЩИЙ ГУСЕНИЧНОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2493997C2 |
| Устройство для управления гусеничным транспортным средством | 1986 |
|
SU1556948A1 |
| Система управления транспортного средства | 1989 |
|
SU1781099A1 |
| Малогабаритный трактор | 1990 |
|
SU1785922A1 |
| РАЗВЕДЫВАТЕЛЬНАЯ ХИМИЧЕСКАЯ МАШИНА | 2007 |
|
RU2369826C2 |
МЕХАНИЗМ УПРАВЛЕНИЯ ПОВОРОТОМ МЕЛИОРАТИВНОЙ ГУСЕНИЧНОЙ МАШИНЫ, содержащий гидромеханический привод управления бортовыми фрикционами с подпружиненными нажимными элементами, включающий в себя гидроцилиндр управления, полости которого связаны с источником давления рабочей жидкости и привод управления тормозами, содержащий управляющий элемент, отличающийся тем, что, с целью повыщения эффективности работы путем обеспечения раздельного управления тормозами обеих гусениц от одного управляющего атемента, гидромеханический привод управления бортовыми фрикционами снабжен поворотной траверсой, установленной на оси, закрепленной на раме мелиоративной гусеничной машины, подпружиненными толкателями и рычагами, при этом каждое плечо упомянутой траверсы связано со щтоком гидроцилиндра управления и через подпружиненный толкатель и рычаг - с подпружиненным нажимны.м элементом бортового фрикциона, а привод управления тормозами выполнен пневматическим и включает в себя тормозной комбинированный кран, механически управляемый гидроаппарат, исполнительные пневмоцилиндры и пневматический источник давления, при этом управляющий элемент привода i управления тормозами кинематически связан с тормозным комбинированным краном, (Л а пневматический источник давления через упомянутый комбинированный кран, механически управляемый гидроаппарат пневмолиниями соединен с исполнительными пневмоцилиндрами, щтоки которых кинематически связаны с тормозами, причем орган управления гидроаппарата кинематически связан с одним из плеч траверсы. сд оо СП 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Талу К- А | |||
| Конструкция и расчет танков | |||
| Изд | |||
| Ак | |||
| БПВ, М., 1963, с | |||
| Катодный усилитель с промежуточными контурами и батарейным коммутатором для цепей сетки | 1923 |
|
SU404A1 |
