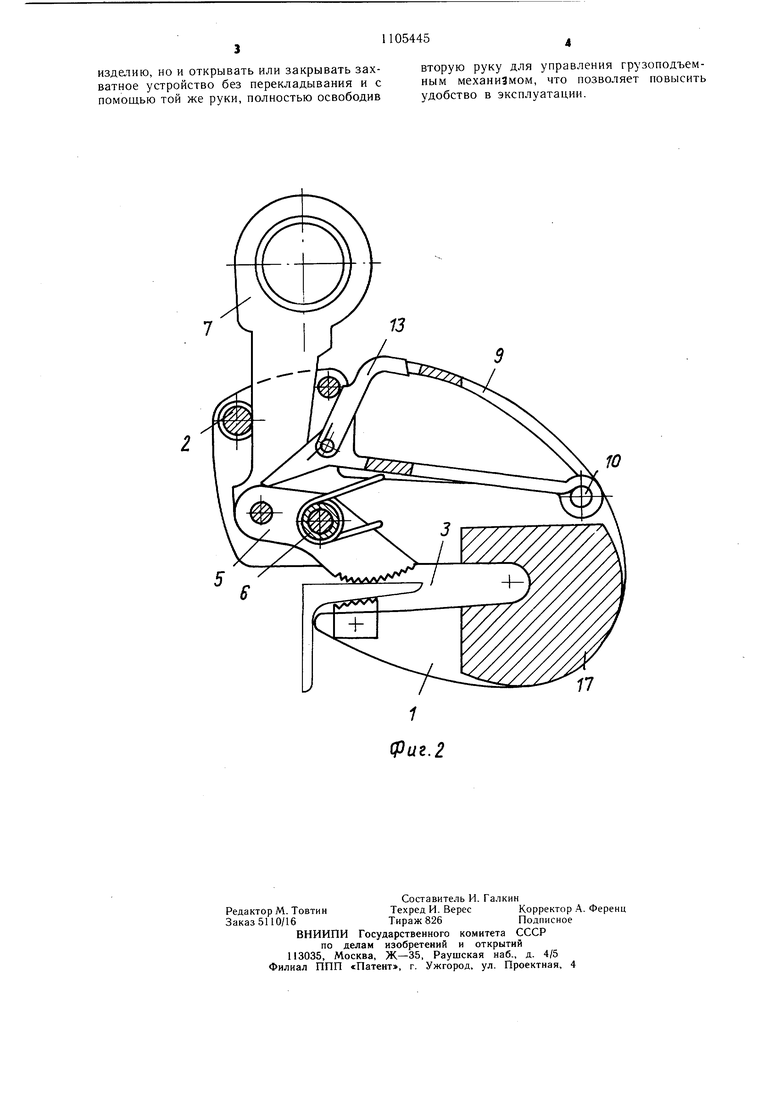
Изобретение относится к подъемно-;рансгюртной технике, в частности к захватным устройствам, и может быть использовано при перегрузке листового и профильного материаловв различных отраслях народного хозяйства. Известно захватное устройство, содержащее скобообразный корпус, шарнирно закрепленный на нем эксцентриковый прижим, один конец которого шарнирносвязан с серьгой для подвесного стропа, и механизм фиксаиии положения эксцентрикового прижима, включающий рукоятку и фиксатор ее положения 1. Недостатком данного устройства является необходимость использования обеих рук работающего для осуществления процесса захвата груза. Цель изобретения - повышение удобства в эксплуатации путем обеспечения возможности работы с захватным устройством одной рукой. Указанная цель достигается тем, что в захватном устройстве, содержащем скобообразный корпус, щарнирно закрепленный на нем эксцентриковый прижим, один конец которого шарнирно связан с серьгой для подвесного стропа, и механизм фиксации положения эксцентрикового прижима, включающий рукоятку и фиксатор ее положения, рукоятка щарнирно закреплена одним своим концом на корпусе с возможностью взаимодействия вторым своим концом с эксцентриковым прижимом и подпружинена относительно него, а фиксатор ее положения представляет собой щарнирно установленный на рукоятке и подпружиненный относительно нее рычаг, при этом устройство снабжено закрепленными на корпусе ограничителем поворота серьги и упором для упомянутого рычага. На фиг. 1 изображено захватное устройство в открытом положении, общий вид; на фиг. 2 - то же, в закрытом положении, общи и вид. Захватное устройство содержит скобообразный корпус 1, состоящий из двух щек, соединенных между собой посредством элемента 2, причем корпус 1 выполнен с зевом 3, по обе стороны которого размещены неподвижная губка 4 и эксцентриковый прижим 5, шарнирно установленный на оси 6 и шарнирно связанный с серьгой 7 для подвесного стропа, имеющей вырез 8. Кроме того, упомянутый элемент 2 является ограничителем поворота серьги 7 для обеспечения рпсположения точки подвеса серьги на линии центра тяжести груза. В верхней части корпуса 1 имеется вырез, в котором расположена рукоятка 9, щарнирно закрепленная посредством оси 10 одним своим концом на корпусе 1 с возможностью взаимодействия выступом 11 на .втором своем конце с эксцентриковым прижимом 5. Фиксатор положения рукоятки 9 представляет собой шарнирно установленный на рукоятке посредством оси 12 рычаг 13, подпружиненный относительно нее пружиной 14 с возможностью взаимодействия с упором 15, закрепленным на корпусе 1. На оси 6 установлена пружина 16, упирающаяся своими концами в рукоятку 9 и эксцентриковый прижим 5. Вкладыщ 17 служит для образования полости между щеками корпуса 1, в котором и размещены эксцентриковый прижим 5, серьга 7, рукоятка 9 и фиксатор ее положения 13 с крепежными элементами и пружинами. Захватное устройство работает следующим образом. В исходном положении захватного устройства пружина 16, воздействуя на эксцентриковый прижим 5 и рукоятку 9, поворачивает их по часовой стрелке. Эксцентриковый прижим 5, поворачиваясь, поднимает серьгу 7 до упора нижней части выреза 8 серьги в ограничитель поворота 2 серьги, а его рабочая часть, имеющая рифления, входит в зев 3 корпуса 1 (см. фиг. 2). Рабочий берет захват рукой за рукоятку 9 и упирает его (нижней стороной) в любую твердую поверхность, например в подлежащий захвату груз. Рукоятка, преодолевая действия пружины 16, поворачивается и поворачивает своим выступом 11 эксцентриковый прижим 5, пока его рабочий конец не выйдет из зева 3 и не утопится в полости корпуса 1 (пространстве между щеками корпуса). В этот момент рычаг 13 своим выступом упрется в упор 15 корпуса и зафиксирует в этом положении все подвижные элементы захвата (эксцентриковый прижим, рукоятку и серьгу 7). Затем рабочий вводит зев 3 захвата в подлежащее захвату изделие (например полку швеллера, см. фиг. 2) и, удерживая захват за рукоятку 9, большим пальцем этой же руки нажимает на рычаг 13, выводя его выступ из взаимодействия с упором 15. В результате этого пружина 16 поворачивает эксцентриковый прижим 5 до зацепления с изделием и удерживает его в этом положении. Затем можно отпустить рукоятку 9 и сигнализировать о возможности подъема, (рабочий может и сам нажать кнопку подъема грузоподъемного средства другой рукой, удерживая некоторое время захват (и груз) за рукоятку 9, например, с целью правильного ориентирования при подъеме). При необходимости освободить груз из захвата рабочий опять нажимает на рукоятку 9 вниз до срабатывания рычага 13, и эксцентриковый прижим 5 уходит из зева, позволяя снять захват с изделия. В данном захватном устройстве, благодаря наличию рукоятки и рядом расположенного рычага фиксатора ее положения, рабочий может не только удобно брать захватное устройство в руку и подводить его к
изделию, но и открывать или закрывать захватное устройство без перекладывания и с помощью той же руки, полностью освободив
вторую руку для управления грузоподъемным механизмом, что позволяет повысить удобство в эксплуатации.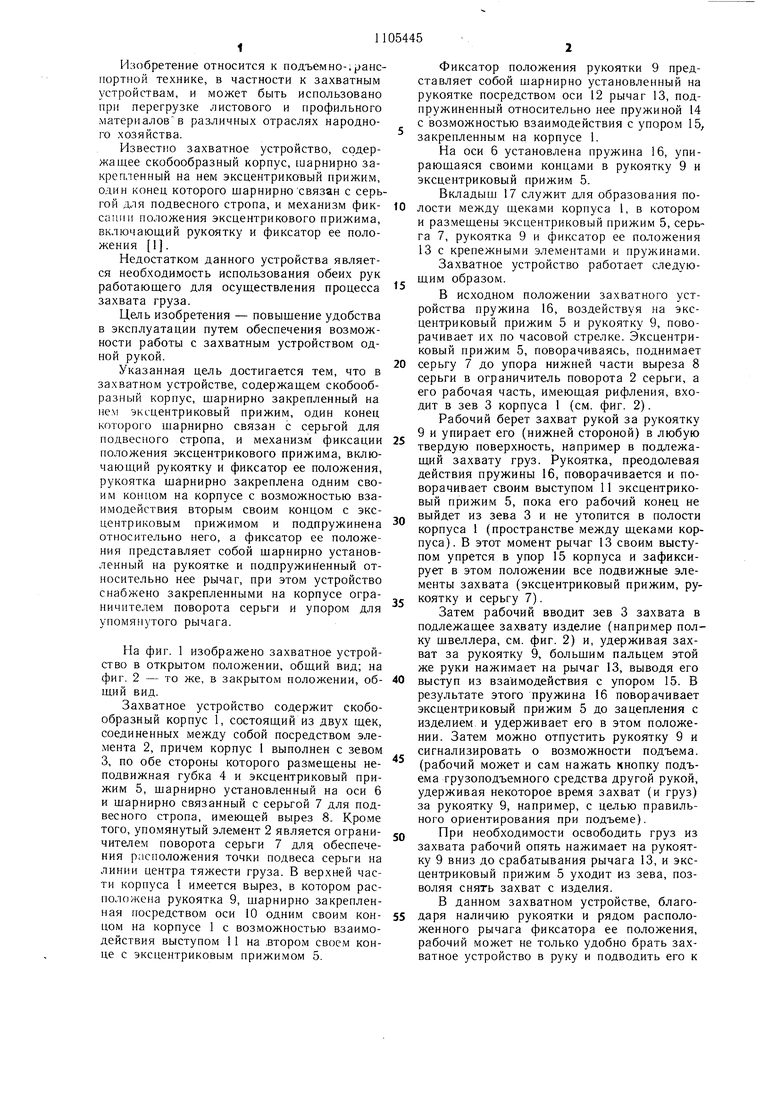
| название | год | авторы | номер документа |
|---|---|---|---|
| Рычажно-эксцентриковый захват | 1986 |
|
SU1440850A1 |
| Захватное устройство для листового материала | 1987 |
|
SU1504203A1 |
| Захватное устройство для транспортирования листового материала в горизонтальном положении | 1978 |
|
SU783189A1 |
| Захватное устройство | 1978 |
|
SU680974A2 |
| Устройство для автоматического сбрасывания стропов с крюка | 1982 |
|
SU1073178A1 |
| Саморасцепляющееся грузозахватное устройство | 1981 |
|
SU992386A1 |
| Захватное устройство | 1987 |
|
SU1477647A1 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| Захват-кантователь | 1988 |
|
SU1504202A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ЗАХВАТНОГО УСТРОЙСТВА | 1993 |
|
RU2035292C1 |
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее скобообразный корпус, шарнирно закрепленный на нем эксцентриковый прижим, один конец которого шарнирно связан с серьгой для подвесного стропа, и механизм фиксации положения эксцентрикового прижима, включающий рукоятку и фиксатор ее положения, отличающееся тем, что, с целью повыщения удобства в эксплуатации, рукоятка щарнирно закреплена одним своим концом на корпусе с возможностью взаимодействия вторым своим концом с эксцентриковым прижимом и подпружинена относительно него, а фиксатор ее положения представляет собой щарнирно установленный на рукоятке и подпружиненный относительно нее рычаг, при этом устройство снабжено закрепленными на корпусе ограничителем поворота серьги и упором для упомянутого рычага. сл ел 4: N СП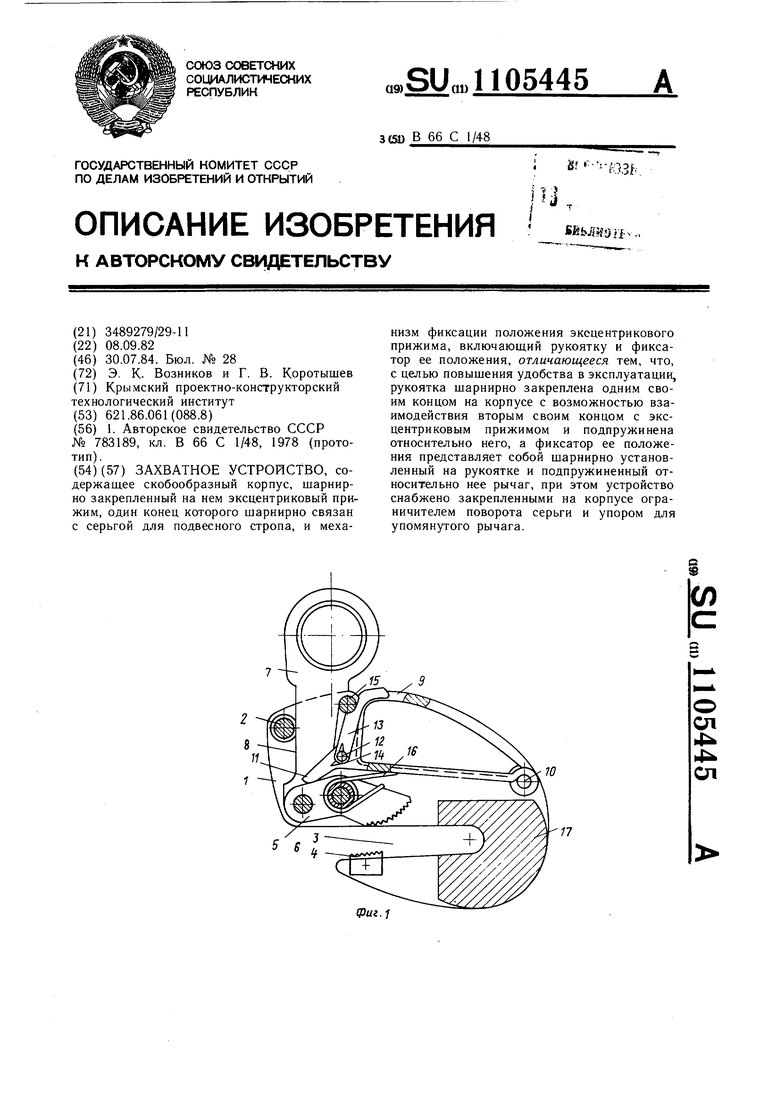
1 Фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватное устройство для транспортирования листового материала в горизонтальном положении | 1978 |
|
SU783189A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
