Г2
С (Ж
сг
5
13
1
Изобретение относится к грузозахватным устройствам.
Цель изобретения - расширение номенклатуры захватываемых изделий, повышение надежности.
На фиг. 1 показан захват в положении строповки груза, обш,ий вид; на фиг. 2 - то же, в открытом положении.
Захват содержит скобообразный корпус 1,
1449850
положение захватного кулачка 4. Пружина 7 фиксирует указанное положение.
Для строповки груза фиксатор 5 рукояткой 6 поворачивается в верхнее положение до упора 11, при этом управляющий рычаг 2 поворачивается в шарнире относительно серьги 3 и прижимает захватный кулачок 4 к грузу. Затем управляющий рычаг 2 под действием пружины 7 начинает подниматься до взаимодействия с упо шарнирно соединенный с ним управляющий Ю ром 9. Захватный кулачок 4 при этом перерычаг 2, который в этом же шарнире катывается своей рабочей поверхностью по
грузу и отходит от направляющего упора 10. Таким образом обеспечивается предварительный захват груза. При подъеме захвата
соединен одним плечом с серьгой 3, а вторым плечом шарнирно соединен с захватным эксцентриковым кулачком 4. Управляющий рычаг 2 контактирует с фиксатором 5, свя- - краном происходит окончательный захват занным с рукояткой б и пружиной 7. Фик-груза за счет силы трения между поверхсатор 5 взаимодействует с выступом 8 управляющего рычага 2, который, в свою очередь.
упирается в упор 9, установленный на корпусе 1. Эксцентриковый захватный куланостью груза и рабочей поверхностью захватного кулачка 4.
Направляющий упор 10 может быть выполнен упругим, что повысит надежность захФормула изобретения
чок 4 своей скошенной боковой поверх- 20 вата при строповке грузов максимальной ностью взаимодействует с направляющим толщины, упором 10, выполненным в нижней части корпуса 1. Упор 11 служит ограничителем поворота фиксатора 5 в положении строповки груза. Зев корпуса 1 образован двумя щеками, которые соединены между собой упорами 9, 10 и осями 12, на которые опирается серьга 3. Пружина 13, закрепленная на осях 14 и 15 управляющего рычага 2, прижимает захватный эксцентрико25
Рычажно-эксцентриковый захват, содержащий серьгу, шарнирно прикрепленную к скобообразному корпусу, упор, установленный на одной из стоек корпуса, управляющий рычаг, шарнирно соединенный одним плечом с серьгой, а другим - с захвый кулачок 4 к направляющему упору 10. on ватным эксцентриковым кулачком, подвижно Ось 4 одновременно служит упором, огра-установленном во второй стойке корпуса,
ничивающим поворот управляющего рычага в открытом положении захвата.
Навешенный на крюк крана с помощью
упор для управляющего рычага, закрепленный на корпусе, отличающийся тем, что, с целью расширения номенклатуры захватываемых изделий, повышения надежности, босерьги 3 захват устанавливают на высту- ковая поверхность захватного эксцентрико- пающую часть захватываемого груза. При вого кулачка выполнена со скосом для взаи- этом фиксатор 5 предварительно разворачи- модействия с направляющим упором, вы- вают в нижнее положение до упора захва- полненным в нижней части второй стойки тывающего кулачка 4 в ось 14. При взаимо- корпуса, а соединение управляющего рычага действии фиксатора 5 с выступом 8 управ- с эксцентриковым кулачком представляет со- ляющего рычага 2 обеспечивается раскрытое 40 бой ось поворота последнего.
положение захватного кулачка 4. Пружина 7 фиксирует указанное положение.
Для строповки груза фиксатор 5 рукояткой 6 поворачивается в верхнее положение до упора 11, при этом управляющий рычаг 2 поворачивается в шарнире относительно серьги 3 и прижимает захватный кулачок 4 к грузу. Затем управляющий рычаг 2 под действием пружины 7 начинает подниматься до взаимодействия с упо ром 9. Захватный кулачок 4 при этом пере катывается своей рабочей поверхностью по
грузу и отходит от направляющего упора 10. Таким образом обеспечивается предварительный захват груза. При подъеме захвата
краном происходит окончательный захват груза за счет силы трения между поверх краном происходит окончательный захват груза за счет силы трения между поверхностью груза и рабочей поверхностью захватного кулачка 4.
Направляющий упор 10 может быть выполнен упругим, что повысит надежность захФормула изобретения
строповке грузов мак
вата при строповке грузов максимальной толщины,
Рычажно-эксцентриковый захват, содержащий серьгу, шарнирно прикрепленную к скобообразному корпусу, упор, установленный на одной из стоек корпуса, управляющий рычаг, шарнирно соединенный одним плечом с серьгой, а другим - с захЮ f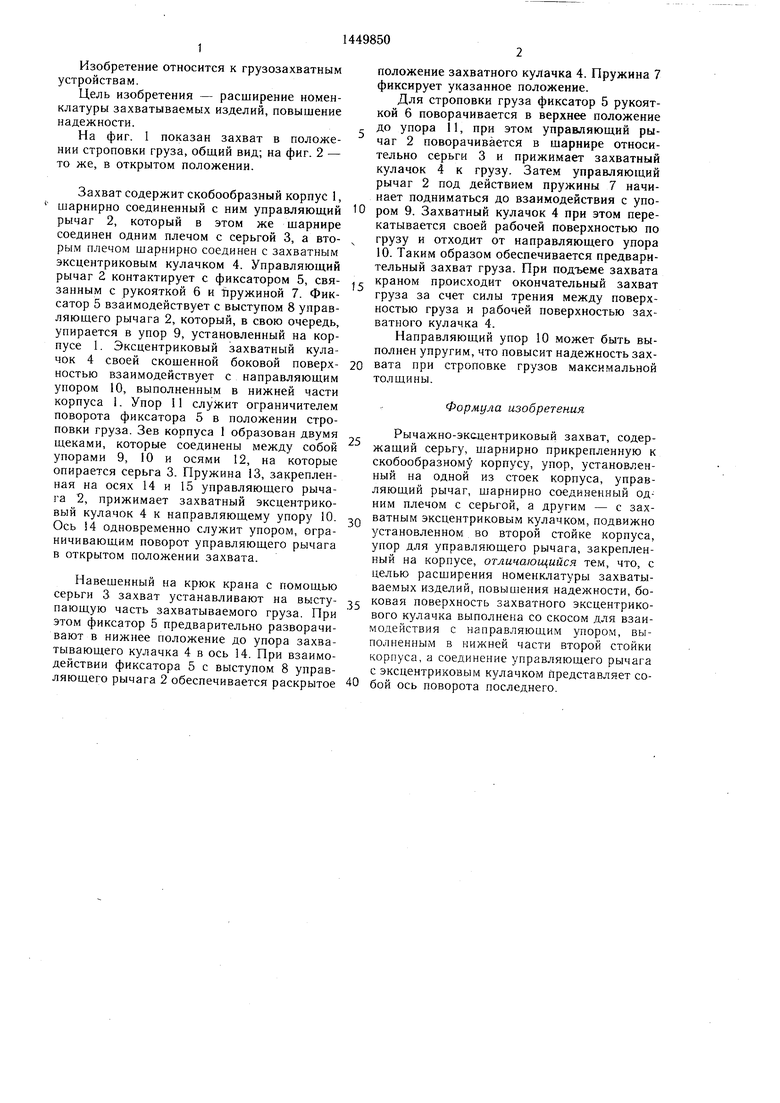
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1982 |
|
SU1105445A1 |
| КРАНОВЫЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1966 |
|
SU180778A1 |
| Захват-кантователь | 1979 |
|
SU823260A1 |
| Автоматический захват Г.П.Симонова | 1985 |
|
SU1364594A1 |
| Устройство для распалубки изделий из бетонных смесей | 1981 |
|
SU977175A1 |
| ГРУЗОПОДЪЕМНАЯ ТРАВЕРСА ДЛЯ КРУПНОРАЗМЕРНЫХГРУЗОВ | 1966 |
|
SU183353A1 |
| Захват для изделий с внутренней полостью | 1987 |
|
SU1463696A1 |
| УСТРОЙСТВО ДЛЯ БЛОКИРОВАНИЯ ПОДВЕСКИ | 2007 |
|
RU2340469C1 |
| Грузозахватное устройство | 1990 |
|
SU1754622A1 |
| КРАН ДЛЯ ПОДЪЕМА И ПОДАЧИ ГРУЗОВ В ОКОННЫЙ ПРОЕМ ЗДАНИЯ | 1991 |
|
RU2048423C1 |

Изобретение относится к грузозахватным устройствам. Цель изобретения - расширение номенклатуры захватываемых изделий и повышение надежности. Захват содержит корпус 1, управляющий рычаг 2, серьгу 3, захватный эксцентриковый кулачок 4, фиксатор 5, рукоятку 6, пружину 7, упор 9, направляюш,ий упор 10, упор 11, оси 12, пружину 13, закрепленную на осях 14 и 15. Захват устанавливают на выступаюш,ую часть груза. Фиксатор 5 рукояткой 6 поворачивают в верхнее положение до упора 11 при этом управляюш,ий рычаг 2 поворачивается и прижимает захватный эксцентриковый кулачок 4 к грузу. Управляющий рычаг 2 под действием пружины 7 поднимается до взаимодействия с упором 9, при этом захватный эксцентриковый кулачок 4 отходит от направляющего упора, предварительно захватывая груз. При подъеме захвата краном происходит окончательный захват груза. 2 ил.
| Захватное устройство для листовых изделий | 1979 |
|
SU854863A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
