Изобретение относится к машиностроению и может быть использовано, например, в различных грузозахватных устройствах промышленных роботов, манипуляторов, автооператоров и т.п.
Известны грузозахватные устройства, в которых осуществляется зажим изделия между захватными губками или рычагами (авт.св. N 632547, кл. В 23 Q 7/04, 1978 или авт.св. N 1305030, кл. В 25 J 15/00, 1987).
Однако подобные устройства не могут использоваться для перемещения подвесных грузов, для захвата нескольких изделий одновременно и, кроме того, они достаточно сложны, поскольку требуют специального привода возвратно-поступательного перемещения (как правило силового цилиндра) одного из кинематических элементов устройства.
Известны также захватные устройства, где осуществляется подхват изделия захватными рычагами устройства (авт.св. N 844219, кл. В 23 Q 7/04, 1981 или авт.св. N 1250451, кл. В 23 J 15/00, 1986).
Недостатком данных устройств является также сложность организации приводных механизмов, невозможность захвата сразу нескольких грузов и невысокая надежность захвата подвесных грузов.
Наиболее близким к изобретению является крюковый захват преимущественно для манипуляторов, содержащий корпус (крюк с зевом, связанный с грузоподъемным механизмов), в котором на соответствующих осях установлены сбрасывающий рычаг, управляющий и управляемый рычаги, запирающий рычаг, а также возвратная пружина, связывающая один из концов сбрасывающего рычага с корпусом, и другие соответствующие кинематические элементы.
В качестве недостатков устройства прототипа можно отметить ограничение его технологических возможностей за счет того, что для освобождения груза обязательно необходимо горизонтальное перемещение захватного устройства при его опускании с грузом по вертикали, т.е. для своего освобождения груз, находящийся в захвате, должен сам определенным образом воздействовать на соответствующие элементы захвата. По этой же причине возможно самораскрывание захвата в случае, когда груз при его горизонтальном перемещении случайно зацепится за какое либо препятствие.
Цель изобретения создание надежного в работе, дистанционно управляемого захватного устройства с достаточно широкими технологическими возможностями, простого в эксплуатации.
Для этого механизм, содержащий корпус с захватной крюковой частью, шарнирно установленные в корпусе на соответствующих осях запирающий рычаг, управляющий двуплечий рычаг и управляемый двуплечий рычаг, а также цилиндрическую пружину, одним концом закрепленную на корпусе, при этом управляющий и управляемый рычаги установлены с возможностью взаимодействия друг с другом соответствующими плечами, снабжен установленным в корпусе электромагнитом с поворотным сектором и амортизаторами, установленными на корпусе с возможностью взаимодействия с захватной крюковой частью, которая выполнена с возможностью ограниченного поворота относительно корпуса и подпружинена относительно него. При этом запирающий рычаг установлен со стороны зева захватной крюковой части с возможностью частичного его перекрытия и подпружинен к корпусу. Управляемый рычаг связан с другим концом цилиндрической пружины, причем на концах обоих плеч управляющего рычага, который подпружинен относительно корпуса, установлены дополнительно введенные ролики, посредством которых он имеет возможность взаимодействия с хвостовиками поворотного сектора электромагнита и с концом соответствующего плеча управляемого рычага, на другом плече которого размещены два дополнительно введенных ролика, имеющих возможность взаимодействия с захватной крюковой частью.
Такое выполнение захватного механизма дает возможность надежно удерживать переносимый груз при любых движениях механизма (жесткая фиксация крюковой части и перекрытие ее зева запирающим рычагом), осуществлять дистанционное управление сбрасыванием груза в любой точке (электромагнитный привод расфиксации захватной части), автоматически возвращать элементы механизма в исходное состояние после снятия управляющего сигнала с электромагнитного привода (кинематика рычажно-пружинной системы механизма), исключить повреждения частей механизма при его срабатывании (амортизаторы).
Дополнительно механизм может оснащаться микровыключателем, установленным в корпусе и взаимодействующим через дополнительный подпружиненный рычаг с управляющим рычагом, для выдачи сигнала о срабатывании механизма.
Кроме того, механизм может иметь устройство регулировки крутящего момента пружин захватной крюковой части, под действием которых она возвращается в исходное состояние после сброса груза.
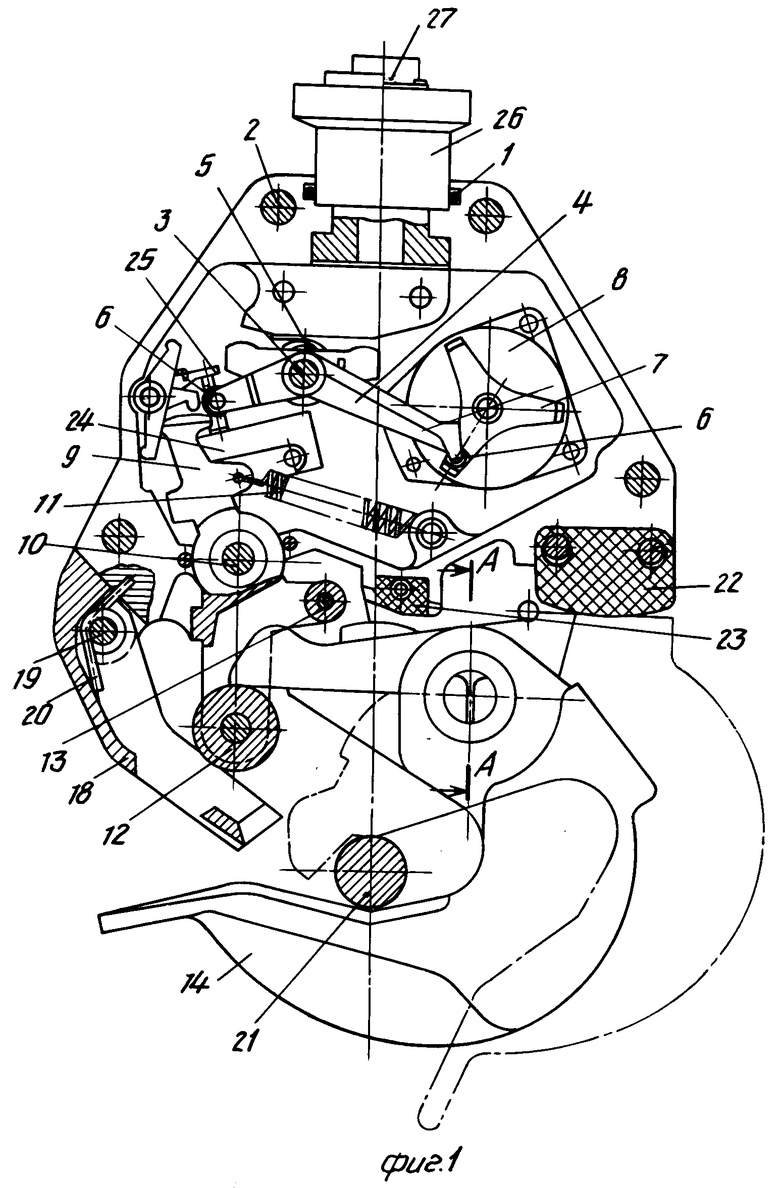
На фиг. 1 показан механизм, общий вид в разрезе; на фиг.2 разрез А-А на фиг.1; на фиг.3 разрез Б-Б на фиг.2.
Исполнительный механизм содержит корпус, образованный, например, двумя обоймами 1, стянутыми четырьмя болтами 2. Внутри корпуса на оси 3 установлен двуплечий управляющий рычаг 4, подпружиненный относительно корпуса с помощью пружины кручения 5. На концах обоих плеч рычага 4 размещены ролики 6, посредством которых рычаг взаимодействует с одной стороны с хвостовиками поворотного сектора 7 электромагнита 8, установленного в корпусе, а с другой стороны с верхним плечом управляемого двуплечего рычага 9, установленного в корпусе на оси 10.
Цилиндрическая пружина растяжения 11 одним концом закреплена на корпусе, а другим на рычаге 9. На нижнем плече рычага 9 расположены два ролика 12 и 13, которые взаимодействуют с захватной крюковой частью 14, имеющей две цапфы 15 посредством которых она установлена на корпусе с возможностью ограниченного поворота. На каждой цапфе 15 установлена и закреплена спиральная пружина 16 (фиг.2,3), крутящий момент которой при необходимости можно регулировать поворотом втулки 17, на которой в этом случае закрепляется второй конец пружины 16. Втулка 17 закрепляется в корпусе в нужном положении с помощью соответствующего фиксирующего винта.
Запирающий рычаг 18, установленный на корпусе на оси 19 и подпружиненный относительно него посредством пружины 20, частично перекрывает зев захватной части 14 и, с одной стороны, поворачиваясь внутрь зева, дает возможность осуществлять захват переносимого груза 21, а, с другой стороны, предохраняет его от выпадания из захватной части.
Амортизаторы 22 и 23 (например, резиновые), установленные на корпусе, предназначены для смягчения ударов захватной части 14 о корпус при ее повороте во время сброса груза. Микровыключатель 24 обеспечивает подачу сигнала о соответствующем состоянии элементов механизма во внешние устройства и на него воздействует подпружиненный дополнительный рычаг 25, который в свою очередь взаимодействует с рычагом 9.
В верхней части корпуса расположена втулка 26 для крепления всего механизма к соответствующей подвеске. Электрическая связь механизма с внешними устройствами осуществляется через разъем 27.
Устройство работает следующим образом. Навешивание переносимого груза 21 (например, серьги грузового стропа) на захватную крюковую часть 14 механизма осуществляется, когда она находится в зафиксированном исходном состоянии (фиг.1). При этом запирающий рычаг 18, поворачиваясь внутрь зева, пропускает навешиваемый груз 21 в зев захватной части 14, которая, поворачиваясь в цапфах 15, опирается своим верхним концом на ролик 12 рычага 9. Управляемый рычаг 9 в свою очередь упирается своим верхним плечом в ролик 6, находящийся на конце левого плеча управляющего рычага 4, который, повернувшись на оси 3, своим правым плечом ляжет на хвостовик поворотного сектора 7 электромагнита 8.
После переноса груза в требуемое место или после проведения с ним необходимых манипуляций для его сброса с захватной части производится подача электроимпульса на электромагнит 8. При этом происходит поворот сектора 7 на определенный угол. Это движение соответственно через рычаг 4 передается на рычаг 9, который, повернувшись на своей оси 10, расстопорит захватную крюковую часть 14, после чего происходит ее раскрытие под действием груза. Падающий груз поворачивает захватную часть 14 до ее упора в амортизаторы 22 и 23, закручивая при этом спиральные пружины 16. Захватная часть 14 отталкивает рычаг 9, который, в свою очередь, поворачивает рычаг 4.
После сброса груза с захватной части 14 последняя под действием закрученных спиральных пружин 16 возвращается обратно в исходное положение. При этом она, воздействуя на ролик 13 рычага 9, повернет его вокруг оси 10, преодолевая силу натяжения пружины 11 и возвращая его также в исходное положение. Рычаг 4 в исходное положение возвращается пружиной 5.
Таким образом, весь механизм вновь возвращается в исходное состояние автоматически.
В процессе сброса груза происходит освобождение нажатой рычагом 25 кнопки микровыключателя 24 и при этом осуществляется подача сигнала о срабатывании механизма по внешние устройства. Затем рычаг 25 вновь поджимает кнопку и во внешние устройства идет сигнал об исходном состоянии механизма.
Цикл работы механизма при необходимости повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Крюковой захват | 1983 |
|
SU1189780A1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Захватное устройство для мешков с сыпучими материалами | 1976 |
|
SU672139A1 |
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1036648A1 |
| Привод откидного борта самосвального кузова | 1983 |
|
SU1139654A1 |
| Устройство для дозированной подачи заготовок | 1985 |
|
SU1284909A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Захватное устройство для грузов с цапфами | 1985 |
|
SU1316972A1 |
| Схват робота | 1990 |
|
SU1773716A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |


Изобретение относится к машиностроению и может быть использовано в различных грузозахватных устройствах промышленных роботов, манипуляторов, автооператоров. Сущность изобретения: механизм содержит корпус с захватной крюковой частью, которая выполнена ограничено поворотной и подпружинена относительно корпуса. Зев захватной части частично перекрывается подпружиненным запирающим рычагом, шарнирно установленным на корпусе. Для раскрытия захватной части механизм снабжен электромагнитом с поворотным сектором, хвостовики которого взаимодействуют через шарнирно установленный в корпусе и подпружиненный двуплечий управляющий рычаг с двуплечим управляемым рычагом, также установленным шарнирно и подпружиненным относительно корпуса. Управляемый рычаг в свою очередь роликами, расположенными на одном из его плеч, взаимодействует с крюковой захватной частью, фиксируя или расфиксируя ее. Для смягчения ударов захватной части при ее повороте относительно корпуса во время сбрасывания груза на корпусе установлены соответствующие амортизаторы. Механизм может дополнительно содержать микровыключатель, дающий сигнал о срабатывании системы механизма, а также устройство регулировки крутящего момента пружин захватной части. 2 з.п. ф-лы, 3 ил.
| Крюковой захват | 1983 |
|
SU1189780A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
