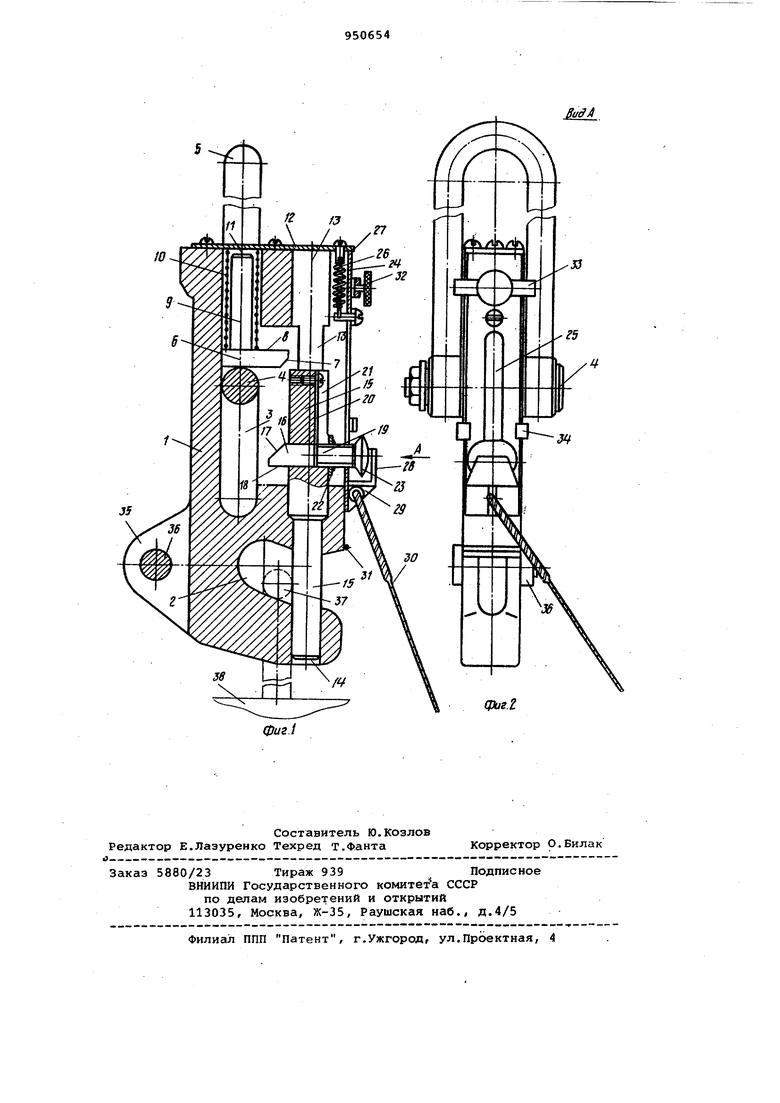
Изобретение относится к грузозахватным устройствам, предназначенным для застропки и дистанционной застро ки грузов с монтажными петлями. Известно грузозахватное устройств содержащее U-образный корпус, перекрытый штырем, снабженным подпружиненным валом с тросом для дистанцион ного управления iTj . Однако это устройство недостаточно надежно в работе, поскольку при случайном зацеплении троса дистанционного управления за препятствие воз можна произвольная отстропка груза. Наиболее близким по технической сущности является грузозахватное уст ройство, содержащее корпус с зевом и вертикальным пазом, в котором размещена грузовая петля для подвески к крану и механизм для перекрывания и запирания зева, включающий в себя ра мещенный с возможностью взаимодействия с грузовой петлей подпружиненный рычаг управления 2 . Это устройство также недостаточно надежно в работе, ибо освобождение груза осущестйляется при ослаблении натяжения стропов. Цель изобретения - повышение надежности работы устройства. Поставленная цель достигается тем, что механизм для перекрывания и запирания зева снабжен вертикальным стержнем с подпружиненным фиксатором, представляющим собой горизонтальный односторонний клин с рукояткой на конце и кронштейном для ограничения хода рукоятки, установленным на корпусе с возможностью перемещения и снабженным тросом дистанционного управления и винтовым стопором, причем рычаг управления выполнен в виде вертикального стержня с односторонним клином на его нижнем конце, размещенным с возможностью взаимодействия с клином фиксатора. При этом опорная поверхность паза корпуса выполнена наклонной, а корпус снабжен дополнительной проушиной для крепления стропа. На фиг.1 изображено устройство, общий вид, продольный разрез; на фиг.2 - вид А фиг.1. Захватное устройство содержит корпус 1, в котором образован зев 2 в виде наклонного вниз паза. В верхней части корпуса выполнен паз 3 с установленной в нем посредством оси 4 грузозахватной петлей 5. На оси 4 горизонтально установлен односторонний клин б со скосом 7 и плоскостью 8. Клин б з ыполнен с направляющим по вертикали цилиндрическим хвостовиком 9, на котором установлена пружина 10 помеценная в отверстии 11 корпуса. Пружина 10 взаимодействует с плоско Ьью 8 клина бис крышкой 12, установленной на верхней части корпуса 1. В корпусе 1 в отверстиях 13 и 14 установлен ступенчатый запорный стержень 15, перпендикулярно которому размещен односторонний клин 16 со скосом 17 и плоскостью 18. Клин 16 выполнен с лысками 19 под вырез пластинчатой пружины 20, установлен ной в пазу 21, выполненным в запорном стержне 15. Клин 16 имеет упор .22 и рукоятку 23. В правой части корпуса 1 установлена подвижная по вертикали планка 24, имеющая паз 25 под лыску 19 клина 16. Планка подпру жинена по вертикали пружиной 26, оди конец которой вакреплен на планке 2 второй - на крышке 12, -выступающая часть 27 которой является ограничени ем планки 24 по вертикали. На планке 24 установлен в виде углового элемента фиксатор.28 ограничения хода клина 16 вправо. Фиксатор вьшолнен в виде кронштейна с ребром жесткости 29с зaкpeплeнны 4 на нём тросом 30 управления. На корпусе 1 установлен ограничитель 31 хода планки 24 вниз по вертикал Нижнее положение планки 24 фиксируется винтовым стопором 32, установленным в П-образной рамке 33 на кор пусе 1. Винт 32 взаимодействует при фиксации нижнего положения с отверс тием планки 24. Для фиксации планки 24 относительно корпуса 1 установле ны Г- образные направляющие 34 в ниж ней ее части. В верхней части роль направляющих выполняет П-образная рамка 33. В левой нижней части корпуса 1 образованы проушины 35 с пальцем 26 для установки петли стропа (не показан). В зев 2 установлена монтажная петля 37 поднимаемого изделия 38. Захватное устройство может работать в режиме автоматической и дистанционной расстроповки изделия за монтажные петли, а также может тывать пакет изделий стропом за монтажные петли и работать в режиме автоматической и дистанционной расстроповки. . Для работы захвата в режиме автоматической расстроповки изделия беру захватное устройство, установленное HanpjiMep, на стропе грузоподъемного механизма, за петлю 5 (при использовании траверсы за проушину 35), при этом ось 4 петли с клином 6 находится в верхнем положении до упора в верхнюю часть корпуса в конце паза 3. Если зев 2 закрыт, поднимают запорный стержень 15 за рукоятку 23 I до соприкосновения скосов 7 и 17 односторонних клиньев 6 и 16, после чего заводят монтажную петлю 37 изделия, в зев 2, и рукоятку 23 опускают . Запорный стержень 15 под действием веса опускается до упора вниз и перекрывает зев 2. Петлю 5 опускают, и она под действием собственного веса и пружины 10 перемещает свою ось 4 с клином 6 до соприкосновения скосов 7 и 17 односторонних клиньев 6 и 16. Поскольку движение- вправо рукоятки 23 клина 16-закрыто фиксатором 28, положение закрытого зева 2 зафиксировано. Если зев 2 открыт при опускании стропа с захватным устройством, то клин 16 находится над клином 6 и соприкасается с плоскостями 8 и 18. Для захвата изделия за монтажную петлю заводят зев 2 в петлю 37 изделия 38, оттягивают подпружиненной пружиной 20 односторонний клин 16 за рукоятку 23 вправо до упора 22 клина 16 с планкой 24 и опускают вниз. Запорный стержень 15перекрывает зев 2, после чего петлю 5 опускают, и она под действием собственного веса и пружины 10 перемещает свою ось 4 с клином 6 до соприкосновения скосов 7 и 17 односторонних клиньев 6 и 16. Поскольку движение вправо рукоятки 23 клина 16 закрыто фиксатором 28, положение закрытого зева зафиксировано. После захвата монтажных петель 37 подаваемого изделия 38 производят натяжку строп или отрыв изделия от площадки. При этом петля 5 через.ось 4 упирается в конец паза 3 корпуса 1. Затем за ребро жесткости 29 или трос управления 30 передвигают планку 24 с фиксатором 28 до упора, и рукоятка 23 освобождается. Планка 24 движется в направляющих 34 и П-образной рамке 33, установленных на корпусе 1, при этом происходит натяжение пружины 26, взаимодействующей с планкой 24 и крышкой 12 корпуса. Крайнее нижнее положение фиксируется винтом 32, установленным в П-образной рамке 33 через отверстие планки 24. Изделие 38 поднимают и транспортируют к месту назначения. После установки изделия по мере опускания стропа ось 4 петли 5 с односторонним клином 6 ПОД действием пружины 10 и веса петли опускается вниз, и клин 6 скосом 7 отжимает подпружиненный по горизонтали клин 16, взаимодействуя со скосом 17, и проходит ниже его, после чего клин 16под действием пружины 20 возвращается в исходное положение. Затем производится натяжка строп. Клин 6 под действием усилия оси 4 петли 5 поднимает плоскостью 8 за плоскость 18 клин 16 с запорным стержнем 15,
освобождая зев 2, поскольку зев 2 выполнен наклонным, а осевые оси 4 и запорного стержня смещена, захватное устройство поворачивается отно|сительно монтажной петли 37 вправо, увеличивая угол наклона зева, и петля 37 свободно из него выходит.
Работа захватного устройства в режиме дистанционной расстропов.ки за трос управления при захвате груза осуществляется аналогичным образом.
После установки изделия за трос 30 управления передвигают фиксатор 23 с планкой 24 вниз и опускают стропы. При снятии нагрузки с петли 5 ось 4 с клином 6 доходит скосом 7 до скоса 17 и отжимает его вправо по горизонтали, так как рукоятка 23 клина 6 освобождена от фиксатора 28. После прохождения клина 6 за клин 18 последний под действием пружины 20 возвращается в исходное положение, и клин 6 находится под клином 16.
При натяжении строп ось 4 петли 5 поднимает клином 6 плоскость 8/клин 16 за плоскость 18 и запорный стержень 15, освобождая зев 2.
При открытом зеве 2 ось 4 доходит до конца паза 3 корпуса 1. Поскольку зев паза выполнен наклонным, а при создании натяжки в конце хода оси 4 по пазу 3 захватное устройство дополнительно поворачивается вправо относительно монтажной петли 37 изделия 38, увеличивая угол наклона зева 2, петля 37 легко освобождается.
Изобретение может применяться на монтажных строительных и погрузочноразгрузочных работах, обеспечивая облегчение труда такелажников и монтажников. При этом полностью обеспечиваются безопасные условия работы.
Формула изобретения i
1. Грузозахватное устройство, содержащее корпус с зевом и вертикальным пазом, в котором размещена грузовая петля для подвески к крану и механизм для перекрывания и запирания зева, включапщий в себя размещенный с возможностью взаимодействия с грузовой петлей подпружиненный рычаг управления, отличающееся тем, что, с целью повышения нащежности работы, механизм для перекрывания и запирания зева снабжен вертикальным стержнем с подпружиненным фиксатором, представляющим собой горизонтальный односторонний клин с рукояткой на конце, и кронштейном для ограничения хода рукоятки, установленным на корпусе с возможностью перемещения и снабженным тросом дистанционного уп-г равления и винтовым стопором, причем рычаг управления выполнен в виде вертикёшьного стержня с односторонним клином на его нижнем конце, размещенным с возможностью взаимодействия с клином фиксатора.
I 2. Грузозахватное устройствопо П.1, отличающееся тем, что опорная поверхность паза корпуса выполнена наклонной.
3. Грузозахватное устройство по пп.1и2, отличающееся тем, что корпус снабжен дополнительной проушиной для крепления стропа.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 515710, кл. В 66 С 1/10, 1971.
2.Авторское свидетельство СССР
700419, кл. В 66 С 1/38, 1975 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1976 |
|
SU607774A2 |
| Автоматизированный дистанционно управляемый подъемный крюк | 2023 |
|
RU2809751C1 |
| Захватное устройство | 1987 |
|
SU1477647A1 |
| АВТОМАТИЗИРОВАННОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2004 |
|
RU2268229C1 |
| Двурогий крюк | 1980 |
|
SU903279A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ РАССТРОПОВКИ ГРУЗА | 2003 |
|
RU2267456C2 |
| Захватное устройство для грузовС МОНТАжНыМи пЕТляМи | 1979 |
|
SU846490A1 |
| Захват для грузов с проушинами | 1990 |
|
SU1730002A1 |
| Саморасцепляющееся грузозахватное устройство | 1981 |
|
SU992386A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2031071C1 |