ГС
Од
со
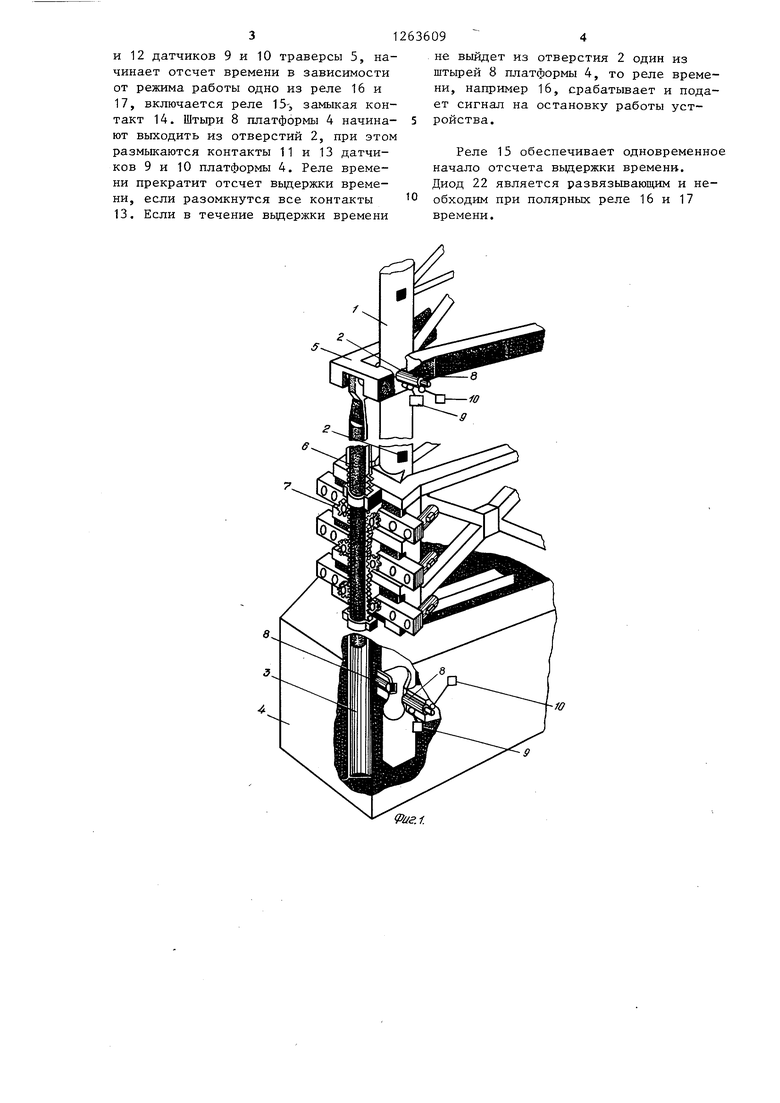
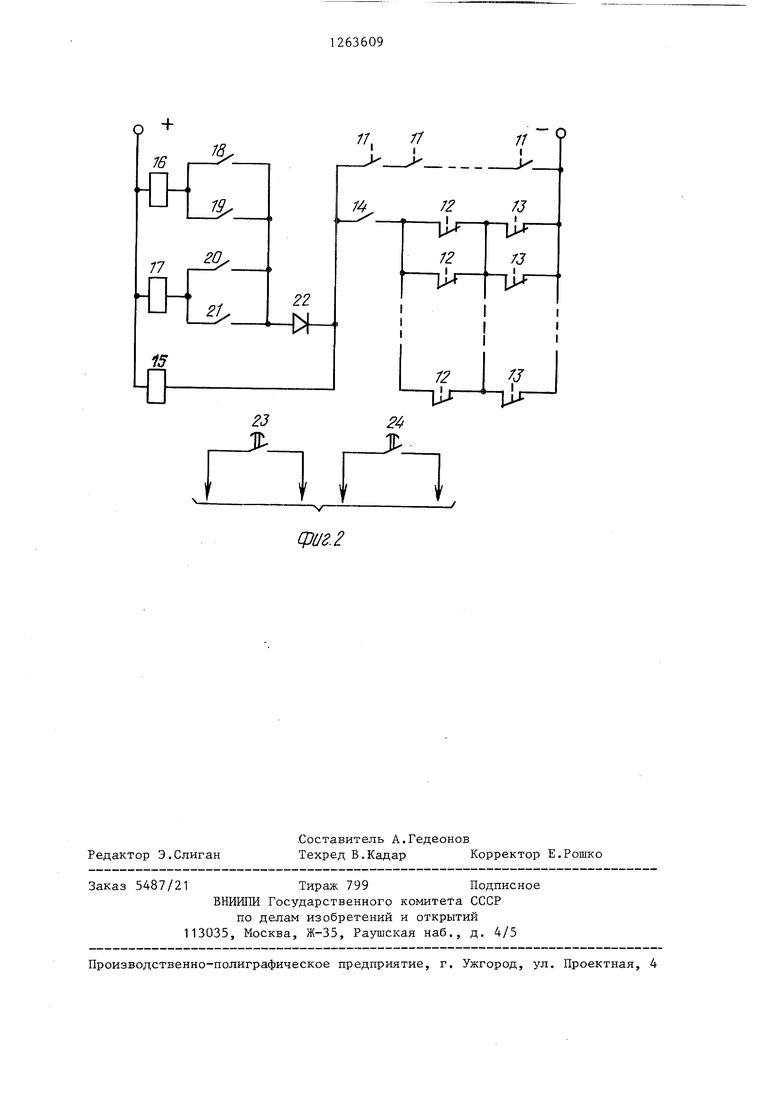
О) 1 Изобретение относится к подъемнотранспортному оборудованию, а именно к устройствам для управления опор но-подъемными механизмами самоподъем ных установок. Цель изобретения - повьшение надежности устройства. На фиг. 1 схематически изображено опорно-подъемное устройство, общий вид на фиг. 2 - электрическая схека устройства. Устройство для управления опорноподъемным механизмом самоподъемной установки содержит опорные колонны 1, выполненные с боковыми отверстиями 2 и установленные в проемах 3 грузонесущей платформы 4, по крайней мере одну траверсу 5, закрепленную на колоннах 1 и несущую зубчатые рейки 6, связанные с зубчатыми колесами 7, смонтированными на платформе 4 и соединенные с приводом их вращения (не показано). Штыри 8 горизонтально установлены на платформе 4 и траверсе 5, частично расположены в отверстиях 2 колонн 1 и связаны с приводом их осевого перемещения (не показано). Датчики 9 и 10 введенного и выведенного положения штырей установлены на платформе 4 и траверсе 5. Замыкающие контакты 11 датчиков 9 соединены последовательно. Размыкающие контакты 12 датчиков 10, установленных на траверсе 5, соединены параллельно друг другу. Размыкающие контакты 13 датчиков 10, установленных на платформе 4, соединены параллельно друг другу. Контакты 12 и 13 датчиков 10 и замыкающий контакт 14 промежуточного реле 15 включены последовательно друг с другом и параллельно подключены к контактам 11 дат чиков 9. Реле времени 16 и 17 включены последовательно с соответствующими параллельно включенными контактами 18-21 переключателя режима работ. Реле 16 и 17 и соответствующие контакты 18-21 включены параллельно друг другу (фиг. 2). Между контактами 11, 14 и контактами 18-21 включен диод 22. Реле 15 включено параллельно реле 17 и диоду 22. Контакты 23 и 24 реле 16 и 17 включены в цепь управления приводом устройства. Зубчатые рейки 6 и зубчатые колеса 7 образуют механизм перемещения платформы 4 относительно траверсы 5 92 Устройство работает следующим образом. Самоподъемную плавучую установку доставляют на плаву на место работы, при этом опорные колонны 1 выдвинуты вверх по отношению к платформе 4. На месте работы установки начинают спуск опорных колонн 1 на дно. Для этого с помощью реек 6 и зубчатых колес 7 перемещают траверсу 5 вверх. В это время опорные колонны 1 удерживаются неподвижно относительно платформы 4 с помощью ее штырей 8. Затем траверсу 5 фиксируют в верхнем положении посредством ее штырей 8. Освобождают платформу 4 от связей с колоннами 1, включают рейки 6 на спуск и опускают опорные колонны 1 на длину зубчатых реек 6. Снова закрепляют опорные колонны 1 относительно платформы 4, вводя штыри 8 в соответствующие отверстия 2 на опорной колонне 1. Продолжая движение траверсы 5 вниз, освобождают от нагрузки ее штыри 8, которые выводят из отверстий 2. Совершают холостой ход, перемещая траверсу 5 вверх. Эти операции продолжают до тех пор, пока опорные колонны 1 не достигнут грунта и не будут в нем надежно закреплены. Вслед за этим поднимают платформу 4 над уровнем воды вне зоны действия волн, выполняя операции, аналогичные вьшгеописанным. Самоподъемная плавучая установка готова к работе. Спуск платформы 4 на воду и подъем опорных колонн 1 в походное положение также выполняется с помощью аналогичных операций шагания с перехватом. Спуско-подъемные операции сопровождаются болъшим количеством операций по вводу и выводу штырей 8 из отверстий 2 опорных колонн 1. Однако вследствие неисправности в приводе управления штырями 8 возможен невывод нескольких или всех штырей 8 после переноса нагрузки, что может привести к аварии. Когда все штыри 8 траверсы 3 выведены из отверстий 2, контакты 11 и 12 датчиков 9 и 10 траверсы 5 разомкнуты, когда все штыри 8 платформы 4 введены в отверстия 2, контакты 11 и 13 датчиков 9 и 10 платформы 4 3 амкнуты. При вводе штырей 8 траверсы 5 в отверстия 2 замыкаются контакты 11
31
и 12 датчиков 9 и 10 траверсы 5, начинает отсчет времени в зависимости от режима работы одно из реле 16 и 17, включается реле 15-, замыкая контакт 14. Штыри 8 платформы 4 начинают выходить из отверстий 2, при этом размыкаются контакты 11 и 13 датчиков 9 и 10 платформы 4. Реле времени прекратит отсчет выдержки времени, если разомкнутся все контакты 13. Если в течение вьщержки времени
63609 4
не выйдет из отверстия 2 один из штьфей 8 платформы 4, то реле времени, например 16, срабатывает и подает сигнал на остановку работы уст5 ройства.
Реле 15 обеспечивает одновременное начало отсчета выдержки времени. Диод 22 является развязывающим и не0 обходим при полярных реле 16 и 17 времени.
+
S
76
20
77
2L
CPU г. 2
// I
11
I
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-подъемное устройство самоподъемной плавучей установки | 1981 |
|
SU982302A1 |
| Опорно-подъемное устройство самоподъемной плавучей установки | 1981 |
|
SU1105453A2 |
| Система определения высоты подъема над водой корпуса самоподъемной буровой установки | 1982 |
|
SU1057371A2 |
| Опорно-подъемное устройство самоподъемной плавучей установки | 1981 |
|
SU1045513A2 |
| Опорно-подъемное устройство самоподъемной плавучей платформы | 1987 |
|
SU1470856A1 |
| Система определения высоты подъема над водой корпуса самоподъемной буровой установки | 1980 |
|
SU948763A1 |
| Опорно-подъемное устройство самоходной плавучей установки | 1982 |
|
SU1154854A2 |
| Опорно-подъемное устройство для самоподъемной установки | 1983 |
|
SU1109500A1 |
| Опорно-подъемное устройство самоподъемной плавучей установки | 1984 |
|
SU1211391A1 |
| Опорная колонна самоподъемной плавучей платформы | 1986 |
|
SU1393877A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОПОРНО-ПОДЪЕМНЫМ МЕХАНИЗМОМ САМОПОДЪЕМНОЙ УСТАНОВКИ, содержащее датчики введенного положения штьфей опорно-подъемного механизма, вьшолненные с замыкающими контактами, и реле времени, контакт которого включен в цепь управления приводом опорно-подъемного механизма, отличающееся тем, что, с целью повышения надежности, оно снабжено датчиками выведенного положения штырей опорно-подъемного механизма, выполненными с размыкающими контактами , и промежуточным реле, выполненным с замыкающим контактом, обмотка которого включена параллельно обмотке реле времени, причем размыкающие контакты датчиков выведенного положения штырей опорно-подъемного механизма соединены параллельно друг другу в две группы, которые включены последовательно друг с другом и через замыкающий контакт промежуточного реле - параллельно-последовательно соединенным замыкающим контак там датчиков введенного положения (Л штырей опорно-подъемного механизма, включенным последовательно с обмоткой реле времени.
| Опорно-подъемное устройство самоподъемной установки | 1983 |
|
SU1208011A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
