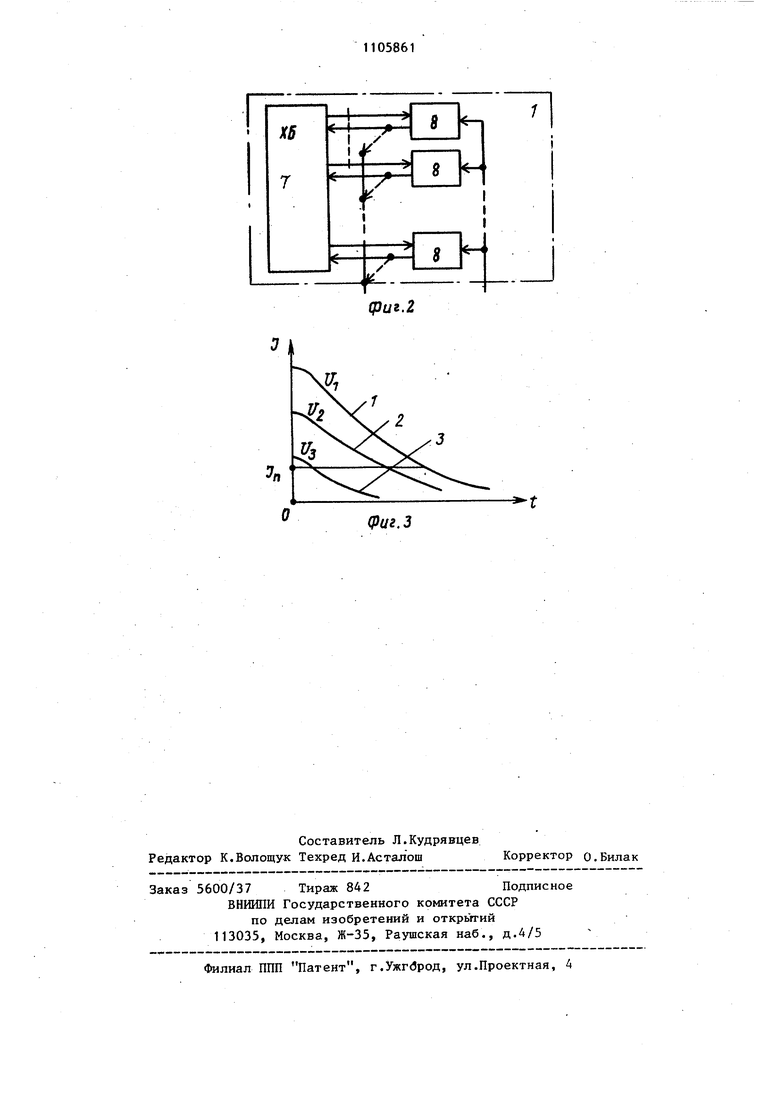
fput.l Изобретение относится к экстремал ному управлению непрерьюными объекта ми в условиях возмущений и может быт применено при построении экстремальных регуляторов различных назначений Известна экстремальная система,содержащая дифференцирующее звено, вхо которого соединен с выходом объекта управления, выход дифференцирующего звена соединен с входом релейного элемента, выход которого подключен к входу исполнительного механизма, а вь1Ход исполнительного механизма соеданен с входом объекта управления 1 . Данная система позволяет реализовать непрерывный поиск с реверсом для однопараметрических экстремальных объектов управления. Наиболее близкой по технической сущности к предлагаемой является экстремальная система, содержащая устройство управления, вход которого подключен к выходу объекта управления, двустабильный элемент, вход которого подключен к выходу устройст ва управления, а выход ко входу релейного элемента, исполнительный механизм, вход которого подключен к выходу релейного элемента, а выход ко входу объекта управления. Эта сис тема также позволяет реализовать непрерывный поиск с реверсом для однопараметрических экстремальных объектов управления 2. Недостатком указанных систем явля ется сложность конструкции, связанна с реализацией непрерьшного поиска с реверсом. Цель изобретения - упрощение конструкции системы. Указанная цель достигается тем, |Что в системе экстремального регулирования, содержащей последовательно соединенные блок организации поиска, исполнительный механизм и объект управления, блок организации поиска вы полнен в виде управляемого по напряжению автогенератора колебаний. Кроме того, автогенератор колебаний содержит операционный усилитель, резистор и конденсатор, включенный между входом и выходом операционного усилителя, первый вывод резистора соединен с входом операционного усилителя, а второй вывод - с точкой нулевого потенциала, причем вход питания операционного усилителя является входом автогершратора колебаний, а выход 61 операционного усили еля - выходом автогенератора колебаний. Автогенератор колебаний содержит химотронный блок и набор релейных элементов, причем входы химотронного блока подключены к соответствующим выходам набора релейных элементов и ко входу исполнительного механизма, а выходы химотронного блока соединены с соответствующими входами набора релейных элементов, и вход питания набора релейных элементов является входом автогенератора колебаний. На фиг.1 изображена блок-схема системы экстремального регулирования, на фиг.2 - блок-схема второго варианта вьтолнения автогенератораJ на фиг.З - зависимость тока, протекающего через химотронный блок в зависимости от величины потенциала И, поданного на электрод. Система экстремального регулирования содержит блок организации поиска 1, исполнительный механизм 2, объект упра.впения 3, операционный усилитель 4, резистор 5 и конденсатор 6. Автогенератор, выполненный по второму варианту, содержит химотронньш блок 7 и набор релейных элементов 8. Система экстремального регулирования с автогенератором, вьшолненным по первому варианту, работает следующим образом. На вход питания операционного усилителя 4 (фиг. TJ поступает напряжение питания от объекта управления 3, пропорц1 ональное величине показателя качества Q . При этом, за счет имеющейся положительной обратной связи через конденсатор 6 возникает генерация. С выхода операционного усилителя 3 импульсы, форма которых близка к прямоугольной, воздействуют на вход исполнительного механизма 2. Это приводит к изменению Состояния выхода исполнительного механизма 2, что вызывает изменение состояния входа объекта управления 3 и, значит его выхода. В момент начала регулирования to показатель качества имеет значение 0. Выходной сигнал U операционного усилителя может иметь как положительную, так и отрицательную полярность, что носит статистический характер. После включения операционного усилителя 4 начинается заряд конденсатора 6 через резистор 5. При этом происходит изменение состояния и объекта управления 3. В случае, если показатель качества Q увеличивается, напряжение питания.операционного усилителя также увеличивается. Это обусловливает увеличение времени заряда конденсатора 6, -так как абсолютная величина напряжения выхода операционного усилителя связана с Q выражением , где Q - величина показателя качества k - коэффициент пропорциональности; - константа, причем «(3ц .. После заряда конденсатора и умень шения напряжения на прямом входе опе рационного усилителя до величины, меньшей напряжения на инверсном входе, происходит изменение знака напря жения на выходе операционного усилителя 4. Начинается заряд конденсато ра 6 в другую сторону. Это приводит уменьшению величины Q и уменьшению напряжения Ц , что обусловливает уменьшение напряжения питания операционного усилителя 4. Так как заряд конденсатора в данном регуляторе опи сывается зависимостью, близкой к экспоненциальной, то увеличение напряжения Uj на выходе операционного усилителя за счет увеличения напряжения питания приводит к более значи тельному увеличению времени заряда конденсатора, чем уменьшение времени заряда при уменьшении напряжения питания. Поэтому время движения объекта управления 3 в сторону увеличения Q больше времени движения в другую сторону при близких скоростях движения, что приводит через определенное число циклов к выходу к экстремуму независимо от того, на каком участке экстремальной характеристики нахо дился объект регулирования в момент начала регулирования. После достижения экстремума происходят рыскания вблизи него. Для уменьшения потерь на рыскание следует выбирать длитель ность импульсов много меньше постоян ной времени исполнительного механизма 2. Система экстремального регулирова ния с автогенератором, вьтолненным по второму варианту, работает следую щим образом. Релейные элементы 8 соединены с химотронным блоком 7 по принципу положительной обратной связи и реализуют самоорганизующук)ся систему. В момент подачи напряжения на входы питания релейных элементов 8 (фиг.2) часть из них срабатывает и на электродах химотронного блока появляется случайное.значение потенциала либо , либо -U . (Зависимость тока электрода J от времени t при подаче на электрод потенциала U имеет вид показанный на фиг.З). С течением времени абсолютная величина тока электрода уменьшается. При достижении значения ;j на входе одного из релейных элементов происходит изменение знака входного тока и этот релейный элемент срабатывает. Это вызывает срабатывание и других релейных элементов. Вновь начинается процесс, показанный на фиг.З. В системе - химотронный блок - релейные элементы возникает генерация. Форма импульсов близка к прямоугольной. Импульсы воздействуют на исполнительный механизм 2, а с его выхода сигнал поступает на-объект управления 3 (фиг.2). При этом изменяется напряжение питания релейных элементов, а следовательно, и их выходной сигнал и . . Как видно из фиг.З, время i между срабатываниями релейных элементов за висит от и . Большему U соответствует большее значение t . Поэтому при увеличении напряжения питания релей-. нйго элемента момент очередного срабатывания релейных элементов отодвигается, а при уменьшении - приближается к моменту предыдущего срабатывания . Таким образом время движения объекта управления к увеличению показателя качества становится больше времени движения в сторону уменьшения показателя качества. Кроме того, скорость движения к увеличению показателя качества несколько больше скорости движения в обратную сторону, что обусловлено изменением величины U . Таким образом, из любой части xaf рактеристики происходит движение к вершине экстремального холма. Применение предложенной экстремальной системы и ее вариантов позволит значительно повысить качество регулирования, снизить требования к элементной базе регулятора по сравнению с прототипом.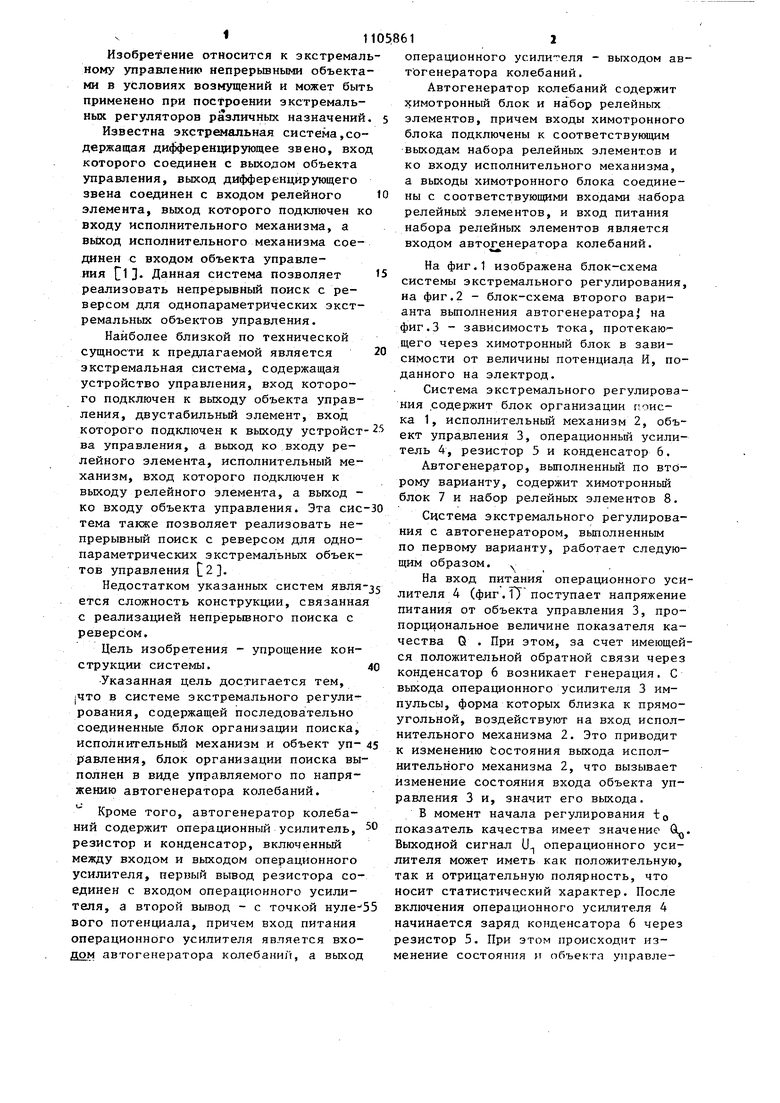

| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1984 |
|
SU1242912A2 |
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
| Управляющее устройство | 1983 |
|
SU1145321A1 |
| Импульсный регулятор | 1984 |
|
SU1251025A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1137442A1 |
| Регулятор | 1987 |
|
SU1425599A1 |
| СИСТЕМА ЗАЖИГАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2276282C2 |
| Устройство для регулирования влажности газов | 1973 |
|
SU469960A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ С ВЫРАВНИВАНИЕМ НАГРУЗОК ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ГЕНЕРАТОРОВ | 2007 |
|
RU2345461C1 |
1. СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ, содержащая последовательно соединенные блок организации поиска, исполнительный механизм и объект управления, отличающаяся тем, что, с целью упрощения конструкции системы, блок организации поиска выполнен в виде управляемого по напряжению автогенератора колебаний. 2. Система поп.1, отличающаяся тем, что автогенератор колебаний содержит операционный усилитель, резистор и конденсатор, включенный между входом и выходом операционного усилителя, первый вывод резистора соединен с входом операционного усилителя, а второй вывод с точкой нулевого потенциала, причем вход питания операционного усилителя является входом автогенератора колебаний, а выход операционного усилителя - выхог дом автогенератора колебаний. 3. Система поп.1, отличающаяся тем, что автогенератор колебаний содеряшт химотронный блок и набор релейных элементов, причемг входы химотронного блока подключены к соответствующим выходам набора релейных элементов и ко входу исполнительного механизма, а выходы химотронного блока соединены с соответствуi Ю1ЦИМИ входами набора репейных элементов и вход питания набора релейных элементов является входом автогенератора колебаний. о ел 00 Од
| Т | |||
| Растрйгин Л.А | |||
| Системы экстремального управления | |||
| М., Наука, 1974, с | |||
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
