ИзобреТ)ение относится к техническим средствам систем автоматического регухшрования и может быть использовано для регулирования и уп равления различными динамическими объектами и технологическими процес сами. Известен пропорционально-дифференциальный регулятор, выполненный в виде релейного элемента, охва ченного через сумматор цепью инерционной отрицательной обратной связи. На второй вход сумматора подается сигнал ошибки управления, а выход релейного элемента связан через выходн то схему с релейными исполнительными органами объекта упра ления П . Недостатком этого регулятора являются высокие энергозатраты в установившемся режиме. Наиболее близким техническим решением к пред;1агаемому является регулятор, содержащий последовательно соединенные схему выделения абсолютного значения сигнала, релейный элемент, охваченный цепью инерционной отрицательной обратной связи, формирователь выходных сигналов управления исполнительными органами и коммутатор, управляющий вход которого соединен через знаковый дискриминатор с выходом регулятора. Релейные исполнительные органы, используемые в этом регуляторе, имеют определенную временную задерж ку на включение, зависящую (иногда значительной степени) от температуры окружающей среды, напряжения питания и т.д. В частности это обусловлено изменением тока через обмот ку исполнительного органа при изменении внешних условий. При проектир вании релейных регуляторов длительность-минимального импульса управления исполнительными органами выби рается исходя из необходимого качества управления в установившемся рё жиме, но не м,енее длительности, необходимой для надежного включения исполнительных органов. При учете всех условий эксплуатации ока зывается, что длительность импульса, гарантирующего срабатывание реального исполнительного органа в 1,5-2 раза может превьшать требуемое для срабатывания время. Это приводит к увеличению энергозатрат на управление и к увеличению ус новившихся скоростей в циклах поддержания в заданных пределах регулируемого параметра (процесса) |2) . Недостатком этого регулятора являются повьшенные энергозатраты на управление, обусловленные невоз можностью изменения длительности минимального выходного импульса с учетом технологического разброса параметров входных цепей (обмоток) релейных исполнительных органов и условий работы системы. Цель изобретения - уменьшение энергозатрат на управление в установившемся режиме работы регулятора за счет изменения длительности минимального управляющего импульса на выходе формирователя выходных сигналов управления исполнительньПШ органами. Поставленная цель достигается тем, что в релейно-импульсный регулятор, содержащий последовательно соединенные блок вьщеления модуля, сумматор, релейный элемент, формирователь выходных .сигналов управления исполнительными;органами и коммутатор , второй вход которого через знаковый дискриминатор соединен с входом блока вьщеления модуля, а также инерционное звено, вход которого соединен с выходом релейного элемента, а выход - с вторым входом сумматора,дополнительно введен усилитель с ограничением выходного сигнала, вход которого соединен с выходом инерционного звена, а выход с вторьпч входом формирователя .выход11ых сигналов управления исполнительными органами.На фиг,1 представлена блок-схема релейно-импульсного регулятора; на фиг.2 - вариант вьшолнения схемы управляемого формирователя выходных сигналов управления исполнительными органами; на фиг,3 - варианты фазовых портретов систем управления при использовании предлагаемого регулятора и регулятора-прототипа Релейно-импульсньш регулятор состбит из последовательно соединенных блока I выделения модуля, сумматора 2, релейного элемента 3, охваченного через сумматор 2 цепью инерционной (апериодической отрицательной обратной связи - инерционньм звеном 4, формирователя 5 выходных сигналов управления исполнительными органами, знакового дискриминатора 6 и коммутатора 7. Управляющий (второй) вход коммутатора 7 соединен через дискриминатор 6 с входом регулятора.
Выход апериодического звена 4 соединен через усилитель 8 с ограничением выходного сигнала с вторым входом формирователя 5. Выходом регу лятора являются выходы коммутатора 7
Формирователь 5 содержит интегросумматор, выполненный на операционном усилителе 9, конденсаторе 10, токозадающих резисторах И и 12 и ограничивающем резисторе 13. Цепи заряда конденсатора 10 выполнены на ключах 14 и 15 и на резисторе 16. В качестве ограничителей напряжения используются диоды 17 и 18. Пороговый элемент, формирующий выходные импульсы, вьйюлнен на транзисторе 19 и резисторах 20 и 21.
Формирователь в составе регулятора работает следующим образом,
При включении релейного элемента 3 сигнал отрицательной полярности с его выхода поступает на запускающий вход формирователя 5 и открывает ключи 14 и 15, замыкающие цепь заряда конденсатора 10 (цепь из элементов 15-10-16-14), который быстро заряжается до напряжения, близкого к величине напряжения питания схемы +Е. При этом выходным напряжением операционного усилителя 9 (или, что одно и тоже, напряжением на конденсаторе 10) открывается транзистор 19 и формируется передний фронт импульса. При выключении релейного элемента 3 ключи 14 и 15 запираются нулевым напряжением по запускающему входу.(ЕСЛИ, исходя из типа выбранных ключ, для их запирания необходи потенциал определенной величины, то он формируется нужным образом, например, первоначальным смещением).. После запирания ключей на выходе интегросумматора начинает формироваться Л1шейно-падающее напряжение, крутизна изменения которого пропорциональна величине суммы токов, протекающих через резисторы 11 и 12. Ток I,, , протекающий через резистор 1I, имеет постоянную величийу и определяет минимальную длительность импульса. Ток. К причем , , зависит от напряжения , и на выходе усилителя с ограничением. Задний фронт импульса формируется при запирании транзистора 19 напряжением интегросумматора. Минимальное выходное напряжение интегросумматора определяется диодом 18 и близко к нулю.
Релейно-импульсный регулятор в установившемся режиме работает следующим образом.
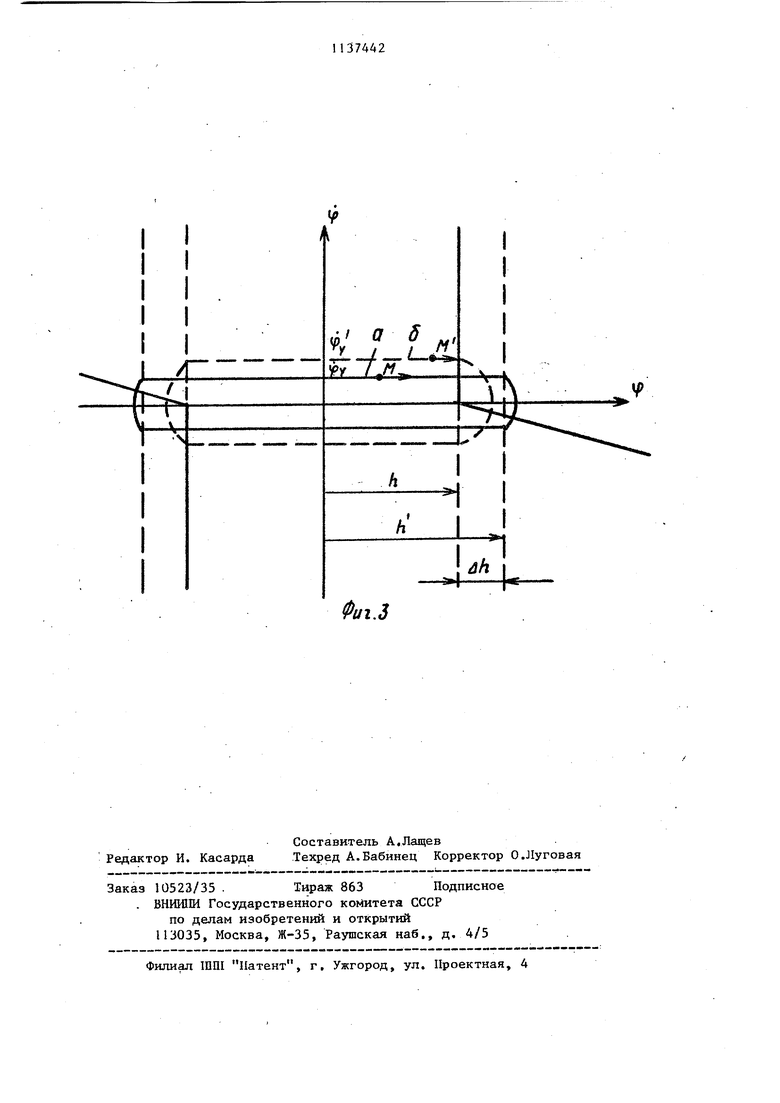
Пусть, например, в установившемс режиме скорость изменения сигнала ошибки управления имеет постоянную величину Cj)u , тогда ошибка управления Cf линейно нарастает. При этом, если сигнал а равен нулю, нарастает также управляющий сигнал S. При достижении сигналом S величины,равной величине порога срабатывания РЭ 3, последний включается и формирет передний фронт импульса на выход формирователя 5 и сигнал апериодической отрицательной обратной связи на выходе звена 4. По истечении времени, близкого к времени действи импульса на выходе формирователя 5 возможны две ситуации; сформированнго импульса достаточно (по длительности) для срабатывания исполнительных органов - в этом случае пид действием развиваемого ими управления изменяется ;сигнал скорости и ошибка управления уменьшается; длительности сформированного импульса недостаточно для включения исполнительных органов - в этом случае скорость Cfy остается без изменений, сигнал ошибки С изменяется в пределах величины гистерезиса релейного элемента 3, а сигнал а на выходе апериодического звена увеличивается (отслеживая сигнал ). Это приводит к тому, что каждый последующий сформированный формирователем 5 импульс, имеет длительность большую по величине, чем предыдущий, что в конечном итоге приводит к срабатыванию исполнительных органов и к изменению знака скорости процесса.
Таким образом,за счет уменьшения средней длительности импульсов, постпающих на исполнительные органы, удается снизить установившуюся скорость процесса. При этом может увеличиться ошибка управления на величину bh , которая зависит от внешних условий эксплуатации и от напряжения питания исполнительных органов. Выбором коэффициента передачи линейного участка усилителя с ограни5II
чением всегда можно добиться, чтобы величина &h, ие превьпяала заданного предела.
На фиг.З представлена фазовая траектория (а ) системы, в которой используется предлагаемый регулятор, и фазовая траектория ( &) системы с ре гулятором-прото типом.
Уровень насыщения усилителя 8 с ограничением выходного сигнала вы 74426
бирается из условий того, что при : максимальном зн.ачении сигнала U длительность импульса, формируемого формирователем 5, должна быть не 5 меньше длительности импульса в прототипе, т.е. той длительности, при которой гарантируется ера батывание исполнительных орга нов при любых начальных усло10 ВИЯХ.


| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1644086A1 |
| Релейно-импульсный регулятор для объекта второго порядка | 1980 |
|
SU943640A1 |
| Релейное управляющее устройство | 1972 |
|
SU443363A1 |
| Способ формирования управляющегоСигНАлА B РЕлЕйНО-иМпульСНыХСиСТЕМАХ упРАВлЕНия | 1976 |
|
SU796785A1 |
| Релейно-импульсный регулятор | 1984 |
|
SU1280567A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1640667A1 |
| Релейный регулятор | 1982 |
|
SU1071995A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1608616A1 |
РЕЛЁЙНО-ИМ11УЛЬСНЫЙ РЕГУЛЯТОР, содержащий последовательно соединенные блок вьщеления модуля,сумматор, релейньй элемент, формирователь выходных сигналов управления исполнительными органами и коммутатор. второй вход которого через знаковый дискриминатор соединен с входом блока вьщеления модуля,«я также инерционное звено, вход которого соединен с выходом релейного элемента, а выход - с вторым входом сумматора, отличающийся тем, что, с целью уменьшения энергозатрат на управление в установившемся работы регулятора, в него дополнительно введен усилитель с ограничением выходного сигнала, вход которого соединен с выходом инерди- онного звена, а выход - с вторым входом формирователя выходных сигналов управления исполнительными органами. (О
Записканзщий
Фиг.З
