Изобретение относится к автоматическим импульсным регуляторам, в ко- торь1х выходной сигнал является прерывной функцией отклонения входного сигнала от заданной величины, и может быть применено в различных системах автоматического управления, в т„ч. с малой инерционностью объект управления, при использовании в качестве исполнительных устройств исполнительных механизмов с постоянной скоростью перемещения, например п установках для приготовления смеси жидкостей заданной температуры путем изменения концентрации компонентов смеси из двух жидкостей с различной
температурой. I
Цель изобретения - повышение надежности, точности и быстродействия регулятора, а также расширение его области применения.
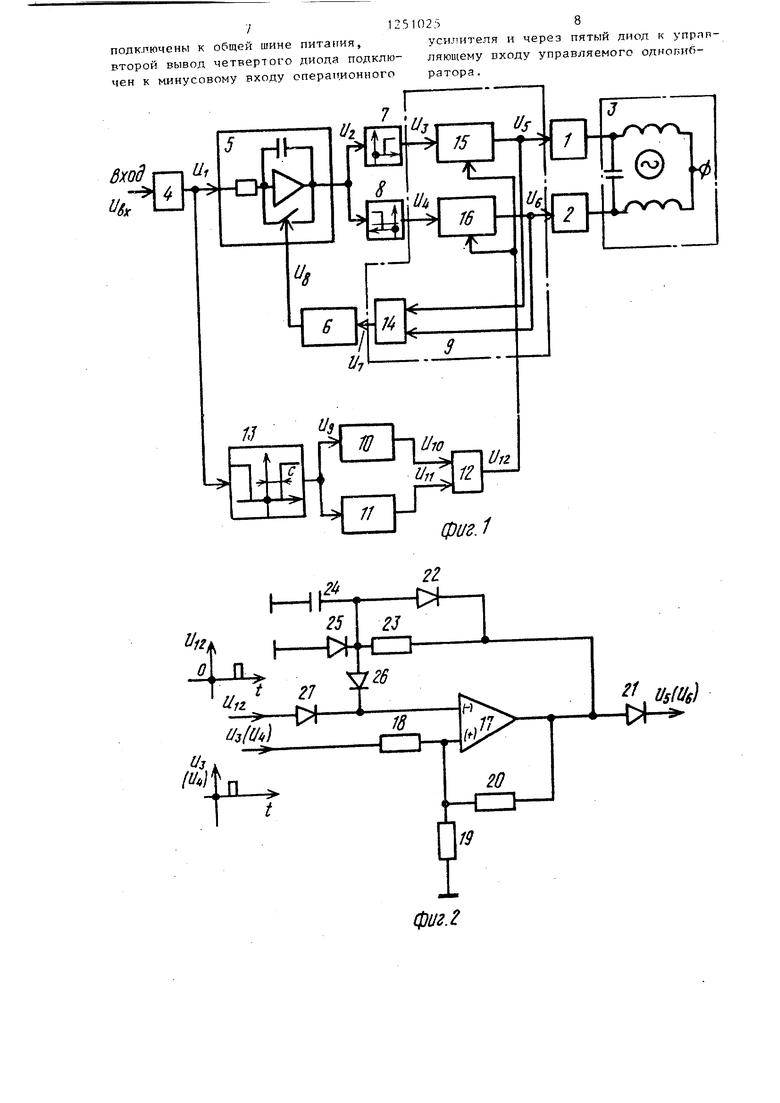
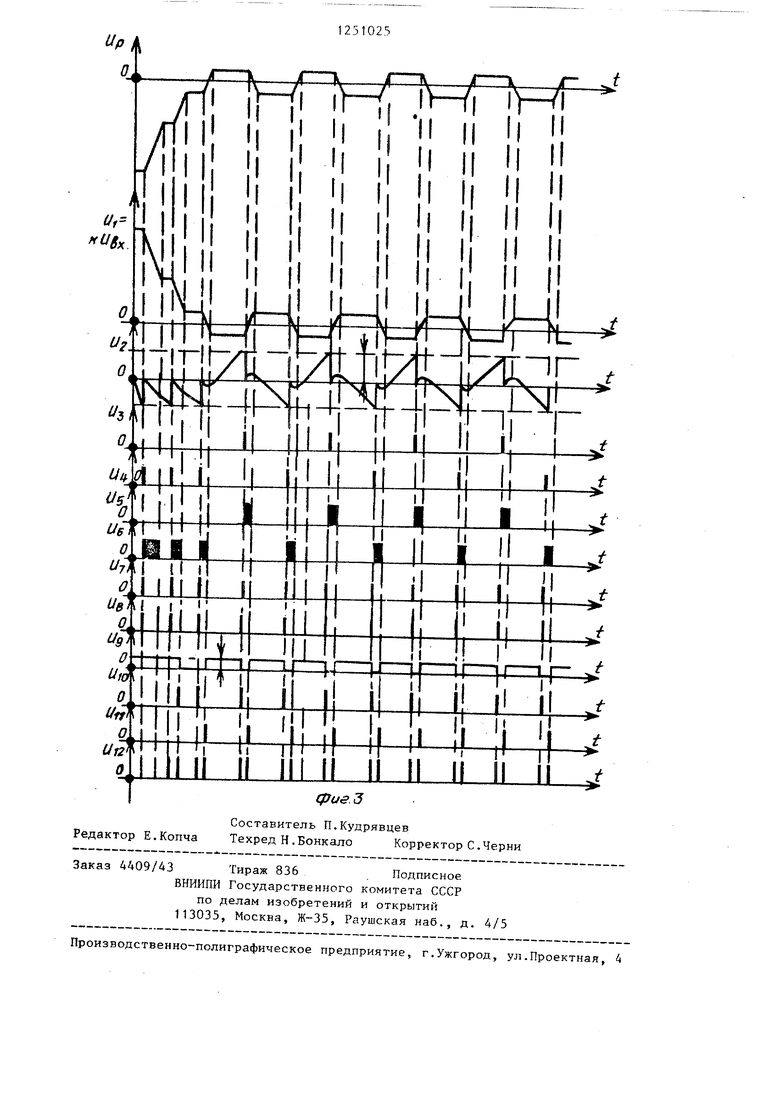
На фиг.1 изображена функциональная схема регулятора; на фиг.2 - принципиальная схема управляемого одновибратора; на фиг.З - эпюры напряжений элементов регулятора при отработке управляющего воздействия.
Регулятор содержит первый 1 и второй 2 усилители мощности, исполнительный механизм 3, предварительный усилитель 4, интегатор 5, первый одновибратор 6, первый 7 я второй 8 релейные блоки, щиротно-импульсный модулятор 9, второй 10 и третий 11 одновибраторы, элемент ИЛИ 12 и тре- тий релейный блок 13.
Широтгю-импульсный модулятор 9 содержит второй элемент ИЛИ М, первый 15 и второй 16 управляемые одно- вибраторы,
Управляемый одновибратор состоит из операционного усилителя 17, первого 18, второго 19 и третьего 20 резисторов, первого 21 и второго 22 диодов, четвертого резистора 23, конденсатора 24, третьего 25, четвертого 26 и пятого 27 диодов.
Регулятор работает следующим образом.
На вход предварительного усилителя 4 поступает сиг}1ал U , равный разности между заданным и действительным значениями регулируемого параметра, С выхода предварительного усилителя 4 усиленный сигнал U, поступает на вход интегратора 5, а также на вход третьего релейнот о блока 13. При достижении сигналом U на
5г
выходе интегратора 5 величины, превышающей зону нечувствительности одного из релейных блоков 7 или 8, происходит срабатывание последнего.
В случае, если, например, заданное значение больше, чем текущее значение регуляруемот о параметра, предварительный усилитель 4 неинверти- рует входной сигнал, а интегратор 5
осуществляет в процессе работы инвертирование входного сит нала, происходит срабатываение блока-8. Релейные блоки 7 и 8 обладают двух- поз.иционными характеристиками и могут быть реализованы по схемам общезвестных компараторов. При срабатывании релейного блока 8 на его выходе возникает кусочно-постоянный сигнал Uij , поступающий на второй
сигнальный вход шпротно-импульсного модулятора 9. При этом происходит запуск управляемого одновибратора 16 тиротно-импульсного модулятора 9. Запуск управляемого одновибратора
16 (фиг.2) осуществляется следующим образом. I
В исходном состоянии, т.е. при
отсутствии сигналов U. и входах одновибратора, операционный усилитель 17 находится в состоянии, при котором на его выходе напряжение равно отрицательному значению питающего напряжения. При поступлении сигнала и, на сигнальный вход управляемого
одновибратора последний поступает через резистор 18 на плюсовой вход одновибратора. Величина входного сигнала и параметры делителя на резисторах 18 и 19 выбираются таким образом,
чтобы значение напряжения положительной полярности на плюсовом входе операционного усилителя от сигнала U превышало значение напряжения отрицательной полярности на том же входе
от выходного напряжения усилителя, величина которого определяется напряжением питания и параметрами делителя на резисторах 20 и 19. Благодаря наличию положительной обратной связи,
образованной резистором 20, усилитель 17 переключается в состояние, при котором на его }зыходе напряжение становится равным положительному значению напряжения питания. Данное напряжение проходит через диод 21 на выход одновибратора. Одновременно начинает заряжаться конденсатор 24, причем скорость возрастания положительного
312510
напряжения на его первой обкладке определяется постоянной времени цепи последовательно соединенных резистора 23 и конденсатора 2А. При возникновении сигнала Ug на выходе управляемого s од.новибратора последний поступает на второй выход широтно-импульсного модулятора 9 и на один из входов элемента ИЛИ 14. С выхода последнего сигнал и поступает на информацион- О ный выход широтно-импульсного модулятора 9 и соответственно на вход одно- вибратора 6. Происходит запуск одно- вибратора 6 по переднему фронту входного сигнала Uj. Длительность импуль-15 са Uj на выходе одновибратора 6 устанавливается минимально возможной, но достаточной для полного обнуления интегратора 5, поскольку при поступлении сигнала Ug на управляющий вход 20 интегратора 5 происходит обнуление последнего. Соответственно становится равным кулю сигнал U на выходе интегратора 5, и происходит отключение релейного блока 8. Сигнал U на 25 сигнальном входе управляемого одно- вибратора 16 также становится равным нулю. При достижении напряжением на первой обкладке, конденсатора 24 величины, превьшгающей значение напряения на плюсовом входе операционного усилителя 17, происходит обратное переключение операционного усилителя 17, и напряжение на его выходе становится вновь отрицательным. Благо- 35 даря диодам 22 и 25 происходит разряд конденсатора 24. напряжение на минусовом входе операционногр усилителя становится равным нулю, а напряжение на выходе операционного 0 усилителя остается отрицательным благодаря наличию обратной связи. Управляющий импульс Ug поступает через усилитель 2 мощности на исполнительный механизм 3, обеспечивая 45 его перемещение в сторону уменьшения сигнала р 1ссогласования. При отсут- твии сигнала U на управляющем входе одовибратора 16 длительность управляющих мпульсов постоянная и определяется,та- О ИМ образом.постоянной времени цепи поседовательно соединенных элементов 23 и 24. Таким образом, до тех пор, пока сигнал рассогласования не уменьшится до определенной величины, на вы- 55 оде регулятора формируется после- . овательность импульсов постоянной лительности, частота которых пропорциональна величине сиг нала рассогласования. При приближении сигнала рассогласования к нулевому значению структурой регулятора обеспечивается коррекция длительности импульса управления и обеспечение автоколебательного режима с заданными характеристиками. Это осуществляется при работе релейного блока 13, одновибраторов 10 и 11 и элемента ИЛИ 12. Релейный блок 13 обладает трехпозиционной характеристикой, приведенной на фиг.1. Данная характеристика может быть осуществлена при паралллельном включении двух релейных блоков с характеристиками блоков 7 и 8 и подключении их выходов к выходу блока через сумматор или элемент ИЛИ. В случае, если в системе целесообразен симметричный автоколебательный режим, то величина зоны нечувствительности релейного блока 13 устанавливается равной или меньшей реакции объекта управления и исполнительного устройства на уменьшенный вдвое управляющий импульс регулятора.
В момент времени, когда сигнал рассогласования достигает значения зоны нечувствительности релейного блока вне зависимости от знака производной сигнала рассогласования, срабатывает один из одновибраторов 10 или 11. При уменьшении сигнала рассогласования до значения зоны нечувствительности релейного блока 13 по заднему фронту кусочно-постоянного сигнала на его выходе U, срабатывает одновибратор 10, а при увеличении сигнала рассогласования до значения, большего зоны нечувствительности, - одновибратор 11 по переднему фронту сигнала U . При срабатывании любого из одновибраторов 10 или 11 сигналы Ujo или U// поступают на входы элемента ИЛИ 12. При появлении сигнала U,2 на вых.о.де элемента . ИЛИ 12 данный сигнал поступает на управлякяций вход широтно-импульсного модулятора 9 и соответственно на управляющие входы управляемых однозиб- раторов 15 и 16. При поступлении сигнала и,2 на управляющий вход управляемых одновибраторов 15 и 16 сигнал и,г (фиг.2) поступает через диод 27 на минусовой вход операционного усилителя 17. При этом происходит сброс одновибратора в исходное положение вне
зависимости от величины заряиа на конденсаторе 24 и обнуление последнего. При безынерционных и малоинерционных объектах управления возникно- вение корректирующего импульса U,, происходит в момент действия управ- импульсов Uj. или Ug. при указанных параметрах зоны нечувствительности релейного блока 13, Таким обра- зом, система принудительно приводится к симметричному автоколебательному режиму, причем в отличие .от регулятора-прототипа длительность управляющего импульса в установившемся режк- ме может быть установлена весьма малой, теоретически до значения, близкого к нулевому. Это позволяет существенно повысить точность управления в установившемся режиме. Посколь ку установление заданного режима обеспечивается автоматически при входе в автоколебательный режим, а не после его установления, изобретение позволяет повысить быстродействие систем регулирования. Установкой заданной несимметричности зоны нечувствительности релейного блока 13 в системе регулирования при использовании предлагаемого регулятора может быть, обеспечен процесс с заданной несимметричностью выходного режима и соответственно с заданной частотой автоколебаний.
Изобретение может быть использовано и для регулирования объектов, обладающих инерционностью. В этом случае параметры зоны нечувствительности релейного блока 13 устанавливаются экспериментально с тем расчетом, чтобы возникновение корректирующего импульса U,j происходило в заданный момент действия управляющего импульса Uj или Ug.
Формула изобретения
1. Импульсный регулятор, содержа- /щий первый и второй усилители мощности, подключенные выходами к первому и второму входам исполнительного механизма соответственно, последовательно соединенные предварительный усилитель и интегратор, подключен- ньй управляющим входом к выходу пер- вого одновибратора, а выходом - к входам первого и второго релейных блоков, широтно-импульсный модуля
тор, первый и второй сигнальные входы которого подключены соответственно к выходам первого и второго ре- л ейных блоков, первый и второй выходы подключ- ны соответственно ко входам первого и второго усилителей мощности, а информационный выход - к входу первого одновибратора, второй и третий одновибраторы, злемент ИЛИ и третий релейный блок, отличающийся тем, что, с целью повышения надежности, точности и быстродействия регулятора, а также расширения его области применения, выход предварительного усилителя соединен через третий релейный блок с входами второго и третьего одно- вибраторов,, выходы которых подключены соответственно к первому и второму входам элемента ИЛИ, а выход элемента ИЛИ подключен к управляющему входу широтно-импульсного модулятора .
2,Регулятор по п.1, о т л и ч а- ю щ и и с я тем, что широтно-импульсный модулятор содержит второй злемент ИЛИ, первый и второй управляемые одновибраторы, сигнальные входы которых соединены соответственно с сигнальными входами широтно- импульсного модулятора, выходы соединены соответственно с первым и вторым выходами широтно-импульсного модулятора и с первым и вторым входами второго элемента ИЛИ, а управляющие входы - с управляющим входом широтно-импульсного модулятора, выход второго злемента ИЛИ подключен
к информационному выходу широтно- импульсного модулятора,
3.Регуля.тор по пп. 1 и 2, о т - личающийся тем, что управляемый одновибратор содержит операционный усилитель, плюсовой вход которого соединен через первый резистор с сигнальным входом одновибратора, через второй резистор - с общей шиной питания и через третий резистор - с выходом операционного усршителя, выход которого подключен через первый диод к выходу одновиб- .ратора и через параллельно включенные второй диод и четвертый резистор к первой обкладке конденсатора и к первым выводам третьего и четвертого диодов, вторая обкладка конденсатора и второй вывод третьего диода
7.12510258
подключены к общей шине питания, усилителя и через пятый диод к упрпп- второй вывод четвертого диода подклю- ляющему входу управляемого одковиб- чен к минусовому входу операттионного ратора.
фиг.г
сриеЗ
Редактор Е.Копча
Составитель П.Кудрявцев
Техред Н .Бонкало Корректор С.Черни
Заказ 4А09/43 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, k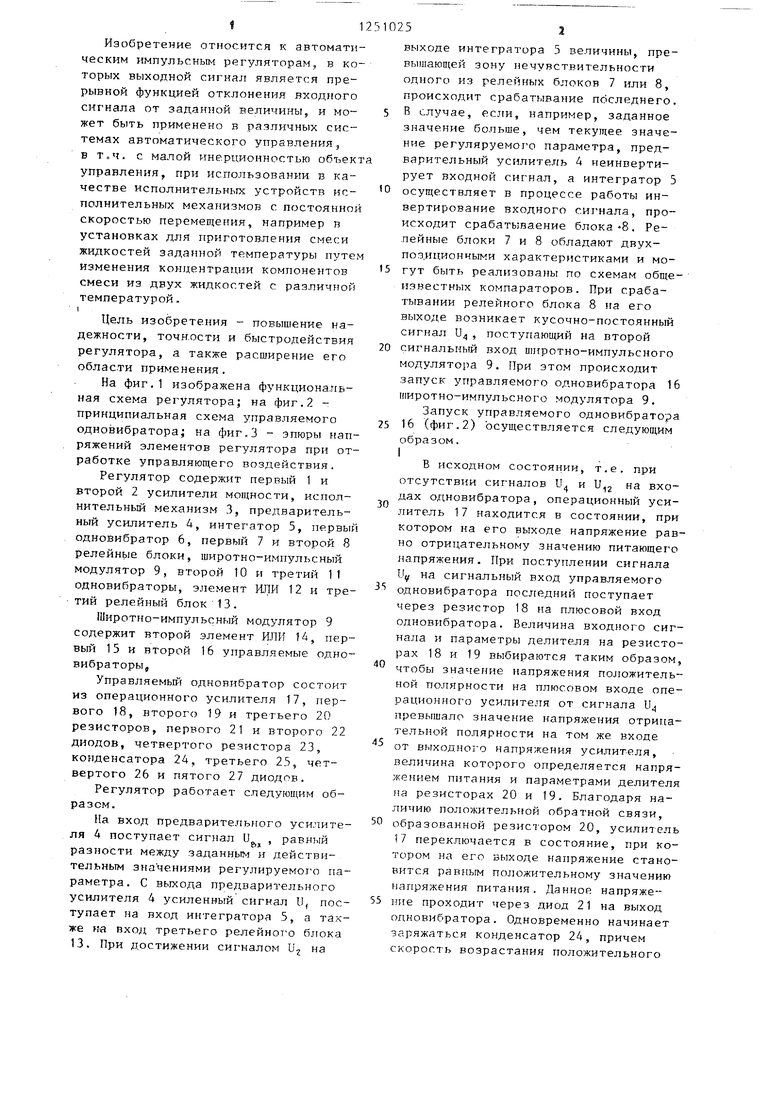
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Частотно-импульсный регулятор | 1984 |
|
SU1238028A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| Частотно-импульсный регулятор | 1987 |
|
SU1444709A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1278806A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
Изобретение относится к системам автоматического управления при использовании в качестве исполнительных устройств исполнительных механизмов с постоянной скоростью перемещения. Цель изобретения - повышение точности, надежности и быстродействия регулятора. Регулятор содержит первый и второй усилители мощности, подключенные выходами к первому и второму входам исполнительного механизма, последовательно соединенные предвари-, тельный ус шитель и интегратор, соединенный управляющим входом с выходом первого одновибратора, а выходом- с входами гтервого и второго релейных блоков, широтно-импульсный модулятор, первый и второй сигнальные входы которого подключены соответственно к выходам первого и второго релейных блоков, а первый и второй выходы соединены соответственно с входами первого и второго усилителей мощности. Информационный выход модулятора соединен с входом первого одновибратора ig Регулятор принудительно приводит управляемую систему к симметричному автоколебательному режиму, что существенно повьпиает точность управления и быстродействие в установившем- г ся режиме. 2 з.п.ф-лы, 3 ил. КО
| Кунцевич В.К., Чехоной Ю.Н, Нелинейные системы управления с частотно- и широтно-импульсной модуля1Д1ей | |||
| Киев: Техника, 1970, с.42-45., Авторское свидетельство СССР № 1117583, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
