2. Регулятор по п. 1, о т л и чающийся тем, что шлицево-резьбовой вал снабжен ганками, установленными с двух сторон вилки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Учебная экспериментальная установка | 1991 |
|
SU1756931A1 |
| Регулятор скорости вращения | 1976 |
|
SU646317A1 |
| Двухимпульсный регулятор по скорости и ускорению двигателя внутреннего сгорания | 1980 |
|
SU981654A1 |
| МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2472951C2 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| Лабораторная установка для исследования шарнирно-рычажного преимущественно кривошипно-ползунного механизма | 1985 |
|
SU1341670A1 |
| Устройство включения Лепилова,преимущественно для фрикционных узлов сцепления | 1983 |
|
SU1139916A1 |
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ МОМЕНТА ИНЕРЦИИ МАХОВИКА | 2015 |
|
RU2578443C1 |
| Регулятор частоты вращения вала | 1986 |
|
SU1372285A1 |

1,РЕГУЛЯТОР СКОРОСТИ ВРАЩЕНИЯ, содержащий датчик скорости и регулирующий орган, отличающийс я тем, что, с целью повышения точности и экономичности регулятора. датчик скорости выполнен в виде ма.ховика, установленного с возможностью поворота вокруг оси внутри корпуса и связанного с ним через рьиаг, шарнирно закрепленньш в корпусе, на конце которого шарнирно установлена вилка с расположенным внутри нее роликом, установленным на шпицеворезьбовом валу, а регулирующий орган выполнен в виде грузов, связанных между собой пружиной и через червячную передачу - с шпицево-резьбовым валом, ось вращения которого , перпендикулярна осям вращения маховика и корпуса и направлена по диаметру опорного диска, причем ролик установлен с возможностью перемещения по опорному диску вдоль его диаметра.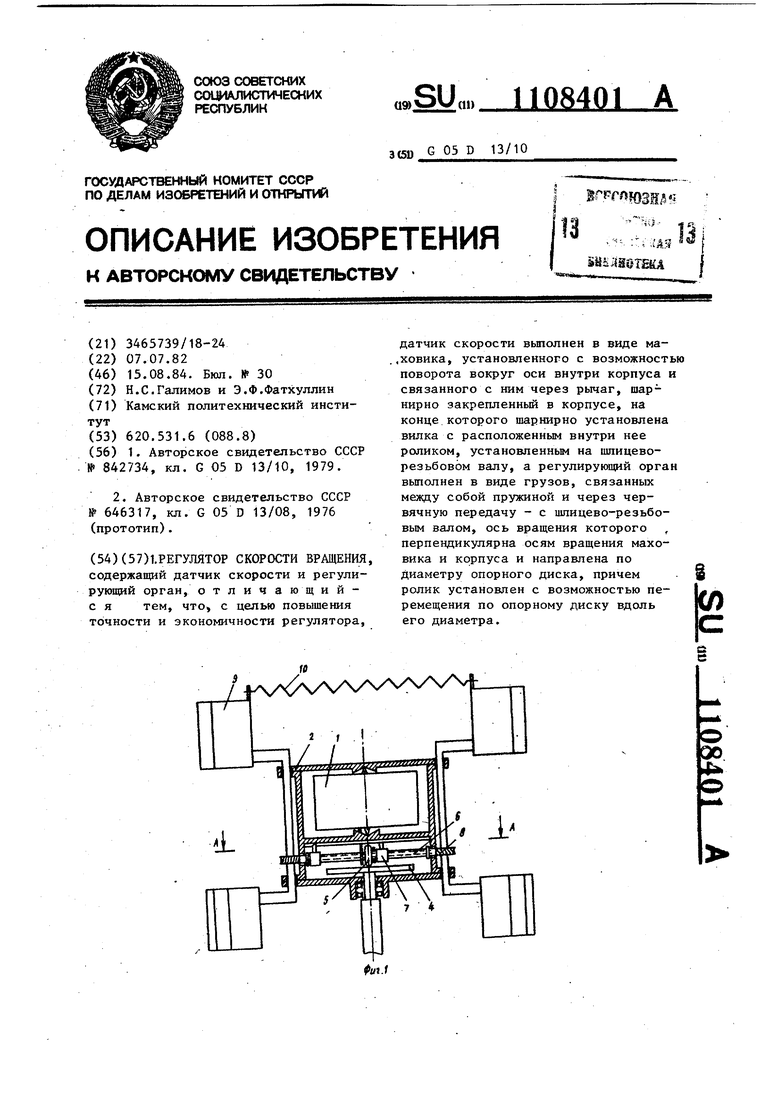
Изобретение относится к области автоматического регулирования, в частности к инерционным регуляторам скорости, и может быть использовано для стабилизации числа оборотов
ведомого вала по принципу прямого регулирования при изменении нагрузк на валу.
Известен регулятор скорости вращния, состоящий из ведущего и ведомого валов и центробежного меха;низма 1.
Этот регулятор поддерживает постоянную угловую скорость ведомого вала за счет подводимой энергии от внешнего источника, энергии, т.е. работает по принципу непрямого регулирования .
Наиболее близким по технической сущности к предлагаемому является р гулятор скорости вращения, содержащий датчик и регулирующий орган, причем датчик скорости состоит из винтовой пары, на стержне винта которой расположены два диска маховика, а регулирующий орган содержит пару конических шестерен, ось одной из которых выполнена в виде винта, на котором расположена гайка, а ось другой конической шестерни связана с фикционным колесом, расположенным между дисками-маховиками С 21.
Недостатками этого регулятора скорости вращения являются малая точность регулирования, неплавность
стабилизации скорости и больщой расход потребляемой энергии от внещнего источника.
Цель изобретения - повьшение точности и экономичности регулятора.
Поставленная цель достигается тем, что в регуляторе скорости вращения, содержащем датчик скорости и регулирующий орган, датчик скорости вьшолнен в виде маховика, установ ленного с возможностью, поворота вокруг сгси внутри корпуса и связанного с ним через рычаг, шарнирно закрепленный в корпусе, на конце которого шарнирно установлена вилка с расположенным внутри нее роликом, установленным на шпицево-резьбовом валу, а регулирующий орган выполнен в виде грузов, связанных между собой пружиной и через червячную передачу с шпицево-резьбовым валом, ось вращения которого перпендикулярна осям .вращения маховика и корпуса и направлена по диаметру диска, причем ролик установлен с возможностью перемещения по опорному диску вдоль его диаметра.
Шлицево-резьбовой вал снабжен гайками, установленными с двух сторо вилки.
На фиг, 1 представлен регулятор скорости вращения, общий вид; на фиг. 2 - сечение А-А на фиг. 1.
Регулятор скорости вращения содержит датчик скорости, выполненный в виде маховика 1, установленного внутри полого корпуса 2 и соединенного с ним через рычаг 3, который передвигает по диаметру невращающегося опорного диска А вилку с роликом 5. Для возврата ролика 5 в центр диска 4 установлены на шли цево-резьбовом валу 6 две гайки 7. Корпус 2 может бьпь приведен во вращение клиноременной передачей. Кроме того, регулятор содержит червячную передачу 8, грузы 9, пружину 10.
Регулятор скорости вращения работает следующим образом.
Исходное положение элементов
регулятора: ролик 5 находится в центре диска 4, маховик 1 неподвижен грузы 9 собраны вблизи оси вращения корпуса 2, что приводит к уменьшению потребляемой энергии при пуске. При включении двигателя (не показан) вращающий момент начинает поворачивать корпус 2, а маховик 1 в силу своей инерционности остается без движения. Рычаг 3 отклоняется на угол Р и перемещает ролик 5 вдоль шпицево-резьбового вала 6 от центра диска 4. Вследствие связи между маховиком и корпусом, допускающей относительный- поворот на некоторый угол «f , по мере поворота корпуса 2 начинается вращение маховика 1. Таким образом, приводной двигатель нагружается постепенно, что приводит к уменьшению пусковогоэтапа. Одновременно с этим выход ролика 5 из центра диска 4 приводит к вращению вала 6, а вращение вала 6 через червячную передачу 8 передается на оси поворота грузов 9 (не показаны). Грузы 9 расходятся от оси вращения маховика 1, увеличивая его момент инерции. В процессе разведения грузов одна из возвратных гаек 7 возвращает ролик 5 в центр диска 4. Ролик 5 прекращает свое вращение, следовательно, движение грузов 9 относительно корпуса 2 прекращается. Скорости маховика 1 корпуса 2 и грузов 9 выравнены, накоплена наибольшая кинематическая энергия. Приводной двигатель может быть выключен . Под действием нагрузки появляется угол (р обратного знака, и ролик с помощью рычага 3 перемещается вдо вала 6 в другую сторону. Вал 6 вращается в другом направлении, и червячные пары 8 собирают грузы 9, уме шая момент инерции системы. При это скорость вращения корпуса 2 поддерж вается на определенном уровне. В пр цессе сбора грузов 9 возвратная га ка 7 возвращает ролик к центру дис ка 4, при этом выравниваются скорое ти движения маховика и корпуса и прекращается вращение вала 6. С воз вращением грузов в центр включается приводной двигатель, и цикл повторяется вновь. Под действием внешнего момента нагрузки MC изменение кинетичес-кого момента системы Н выражается -.j H--° C2maa t a.) j-Cv« a2 R rN-. Q.. Nt m - масса всех грузов; Си - угловая скорость маховиков; R - радиус вращения грузов величийа переменная. Для переменной части момента инерции системы из-за движения грузов при (и, постоянная: , (.-fti,. . t J n n2iJir,u) ft.(g)crft -vnce J Maoti, .(л О, то если принять, что w(s) ЙЛг(к Регулятор скорости вращения позволяет в результате накопления кинетической энергии преодолевать повышенные нагрузки без увеличения мощности двигателя с сохранением данной угловой скорости вращения. Двигатель, приводящий маховики во вращение, можно использовать только для накопления достаточной кинетической энергии и выключить, что уменьшает реактивную нагрузку и расход потребляемой энергии.
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Центробежный регулятор скорости | 1979 |
|
SU842734A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулятор скорости вращения | 1976 |
|
SU646317A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
