Изобретение относится к машиностроению и может быть использовано в электромеханических приводах, в частности в приводах различных машин (например, в мотоциклах, автомобилях), для перемещения груза при балансировке узлов машин и механизмов.
Известно, если тяжелый предмет, как маховик, который крепится к валу, в силу колебания крутящего момента или колебания частоты вращения коленчатого вала появляется неуравновешиваемый дисбаланс массы, распределенный случайным образом, который появляется в ходе эксплуатации устройства, например, из-за износа устройств.
В связи с этим существует потребность маховика, в котором момент инерции меняется независимо от скорости вращения, необходима коррекция положения центра массы груза относительно оси вращения.
В настоящее время большинство приводов машин (в том числе и автомобилей) оснащаются маховиками с постоянным моментом инерции (Передерий В.П. Устройство автомобиля. Изд-во «Форум». 2011, 288 с.).
Их недостатком является то, что изменение момента инерции маховика не может регулироваться путем увеличения или уменьшения расстояния между центрами масс и осью вращения маховика, что приводит к повышенному расходу топлива. Такой маховик с постоянным моментом инерции не позволяет поддерживать частоту вращения в заданном диапазоне без дополнительной подачи топлива, а также конструкция сложна в целом, и регулирование положения центра массы относительно оси осуществляется в весьма небольших пределах.
Известно техническое решение, получившее надежное теоретическое обоснование (Артоболевский И.И. Теория механизмов машин. - М.: Наука., 1988, с. 80) и широкую практику промышленного внедрения, - маховик. Неразъемный, жестко связанный с начальным звеном механизма (часто являясь частью этого звена при изготовлении с ними заодно или выполняя его роль), маховик фактически является аккумулятором и кинетической энергии, накапливая ее во время ускоренного движения начального звена (например, в режиме холостого хода механизма), и отдавая при замедлении (например, в режиме рабочего хода, при росте полезного сопротивления, преодоление которого является основной функцией механизма).
Однако недостатком данной конструкции является то, что заниженная в расчете величина момента инерции способствует росту неравномерности движения начального звена и увеличению инерционных нагрузок, что снижает его надежность. Кроме того, при завышении в расчете величины момента инерции маховика требуется увеличение пускового момента электродвигателя, сообщающего движение начальному звену, что усложняет решение задачи оптимального энергообеспечения. Таким образом, все это в целом приводит к ограничению скорости вращения маховика, а следовательно, к его энергоемкости.
Известен маховик переменного момента инерции, содержащий поворотные рычаги с грузами, планетарный механизм, электрическую муфту и систему управления (патент US 2007/0179012 от 02.08.2007, Kimura). Удельная энергоемкость такого маховика несколько выше, что позволяет использовать его в приводах автомобилей, однако его функции ограничиваются обеспечением устойчивой работы двигателя на разных режимах. Для накопления энергии при рекуперативном торможении с последующим ее использованием при разгоне автомобиля энергоемкости такого маховика недостаточно. Кроме того, в его конструкции отсутствуют грузы, которые могли бы занимать различные положения относительно друг друга, способные учитывать влияние износа, вызванного длительной эксплуатацией механизма, и накапливать потенциальную энергию; устройство сложно в плане технологии изготовления, имеет большие габариты и недостаточно надежно.
Известен маховик с регулируемым моментом инерции, взятый за прототип, составляющий неразъемное соединение с выполняющим периодически неравномерное движение начальным звеном механизма, с возможностью уменьшения степени отрицательного влияния этой неравномерности движения начальным звеном механизма, с возможностью уменьшения степени отрицательного влияния этой неравномерности на технические характеристики механизма, массивный обод является связующим звеном для полумуфт, размещенных на валах электродвигателя, и начального звена механизма, образуя с ним кинематическую цепь, содержащую спицы и массивные ползуны; при этом ползуны, выполненные с возможностью перемещения в радиальных пазах обода, образуют с ним поступательные кинематические пары, а спицы образуют вращательные кинематические пары в соединениях с полумуфтами и ползунами (патент RU №2498127, кл. F16F 15/31, F16D 3/12 от 11.03.2012).
Удельная энергоемкость такого маховика несколько выше, что позволяет использовать его в приводах автомобилей, однако его функции ограничиваются обеспечением устойчивой работой двигателя на разных режимах. Для накопления энергии при рекуперативном торможении с последующим ее использованием при разгоне автомобиля энергоемкости такого маховика недостаточно. Кроме того, применение ползунов (грузов) создает усложнение конструкции механизма, сложную технологию изготовления и недостаточную надежность. Они размещены на ограниченном участке от оси вращения вала в весьма небольших пределах, в результате чего в процессе длительной работы массивные ползуны теряют частично свою сбалансированность из-за неуравновешенных дисбалансов массы, возникающих в ходе эксплуатации механизма (например, его износа).
Технической задачей предлагаемого изобретения является создание устройства для регулирования изменения момента инерции маховика, способного в каждом балансировочном плавающем грузе обеспечить возможность регулирования положения центра массы плавающего груза в плоскости, перпендикулярной оси маховика, без изменения его массы и его габаритных размеров, следовательно, расширение пределов регулирования положения центра массы каждого груза.
Техническим результатом является использование для изменения момента инерции в процессе работы механизма плавающих грузов при помощи электромеханических приводов (пар), позволяющих с высокой точностью осуществлять изменение расстояния от оси вращения центра до центра масс плавающих грузов каждого по пазам направляющих с профильным сечением во время эксплуатации механизма, что исключает неравномерность движения плавающих грузов, чем обеспечивается плавность работы устройства. Появляются варианты создания требуемых корректировок дисбаланса, возникающего в ходе эксплуатации устройства, который может возникать как статический для механизмов малых габаритов, так и динамический - для механизмов больших габаритов.
Техническая задача решается предлагаемым устройством для регулирования изменения момента инерции маховика, составляющим неразрывное соединение с начальным звеном механизма с возможностью уменьшения степени отрицательного влияния неравномерности движения начального звена на технические характеристики механизма, обод, который является связующим звеном для полумуфт, размещенных на валах электродвигателя и начального звена механизма, образуя с ним кинематическую связь; ползуны с возможностью перемещения в радиальных пазах обода образуют с ним поступательные кинематические пары, обод снабжен направляющими с профильным сечением, расположенными диаметрально противоположно относительно вала, а ползуны выполнены в виде плавающих грузов, перемещающихся перпендикулярно оси вращения, с начальным звеном механизма с возможностью их перемещения по направляющим и размещенных между полумуфтами, при этом для перемещения плавающих грузов используют электромеханические приводы, состоящие из шагового электродвигателя и роликовинтовой пары.
Кроме того, плавающие грузы установлены на корпусе обода в равномерно расположенных между собой направляющих с профильным сечением, не менее трех звеньев, с закрепленными на них с плавающими грузами.
В результате проведенного поиска по источникам научно-технической и патентной информации не было обнаружено устройство для регулирования изменения момента инерции маховика с заявленной совокупностью существенных признаков, обеспечивающих такой же технический результат.
Таким образом, можно сделать вывод о том, что предлагаемое изобретение обладает новизной, промышленно применимо и имеет изобретательский уровень, так как именно заявленная совокупность существенных признаков обеспечит достижение поставленной перед изобретателем задачи.
На чертеже представлен в общем виде один из вариантов конструкции, отвечающей предложенному техническому решению.
На валу 1 электродвигателя и начального звена механизма укреплены полумуфты 2. На корпусе обода 3 радиально расположены направляющие 4, 5, 6 и 7 с профильным сечением, на которых смонтированы плавающие грузы 8, 9, 10 и 11. Плавающие грузы могут легко перемещаться вдоль направляющих с помощью известных электромеханических приводов, состоящих из шагового электродвигателя и роликовинтовой пары (на чертеже не показано для упрощения). Корпус обода 3 может иметь равномерно распределенные по окружности направляющие 4, 5, 6 и 7 не менее трех звеньев соответственно с плавающими грузами 8, 9, 10 и 11 (на чертеже показана схема с четырьмя звеньями), с регулируемыми приводами, с возможностью перемещения их в осевом направлении к центру вала с корректировкой каждого плавающего груза при дисбалансе, возникающем в процессе эксплуатации механизма, в результате износа деталей устройства. Положение плавающих грузов определяется фиксатором управления электромеханического привода, состоящего из шагового электродвигателя и роликовинтовой пары (не показано для упрощения чертежа). Таким образом, электромеханический линейный исполнительный механизм предназначен для исполнения команды управления с плавающими грузами.
Устройство для регулирования изменения момента инерции маховика работает следующим образом.
При работе устройство регулируемого изменения момента инерции маховика позволяет создать легко управляемые накопители энергии. Сюда можно отнести не только сам маховик, но, например, самобалансирующее колесо или другое техническое устройство. Отсутствие больших трений в плавающих грузах обеспечивается надежно за счет использования их в работе с возможностью перемещения на различные расстояния независимо друг от друга путем применения электромеханических приводов (не показано). С помощью известных электромеханических приводов изменяют положение центра массы каждого плавающего груза как отдельно, так и совместно по отношению к центру вращения вала, по направляющим с продольным пазом и с профильным сечением. Груз смещается к центру или, наоборот, от него к окружности обода. Таким образом, соответственно смещается центр массы маховика с его осью вращения. После окончания регулировки фиксируют положение каждого плавающего груза, фиксирующегося электромеханическим приводом, состоящего из шагового двигателя и роликовинтовой пары. В результате этого возможно сбалансировать (неуравновешиваемый) дисбаланс массы, распределенный случайным образом, который возникает в результате длительной эксплуатации механизма, например, из-за его износа. При этом создавать как дисбаланс, так и необходимую вибрацию для других устройств.
Следует особо отметить в работе предложенного изобретения то, что функциональные возможности предложенного устройства позволяют иметь: статический дисбаланс, когда на корпусе маховика через равные расстояния по окружности закреплены направляющие с минимальным количеством звеньев, не менее трех - в виде плавающих грузов (например, мотоциклы), а также - динамический дисбаланс, когда на корпусе обода через равные расстояния по окружности закреплены направляющие по три в двух разнесенных полюсах соответственно, с плавающими грузами максим с шестью звеньями по три в двух разнесенных плоскостях. Таким образом, имеем многозвеньевую систему с плавающими грузами. Эти варианты расширяют функциональные возможности предложенного устройства.
Роликовинтовая пара, т.е. роликовинтовой привод (РВП), обладает большим передаточным числом и высокой точностью позиционирования. РВП является одним из самых мощных и грузоподъемных линейных механических приводов. Известно, что роликовинтовая пара состоит из винта и гайки, внутри которой по окружности расположены ролики, параллельные винту. Нагрузка передается от гайки к винту через все ролики одновременно. Большая площадь контакта резьбы винта, роликов и внутренней поверхности гайки способствуют увеличению грузоподъемности и долговечности всей системы. Их преимущества - это устойчивость к ударным нагрузкам и сохранение работоспособности при отсутствии смазки. Отсюда применение их в каждом отдельном из предложенных плавающих грузов (балансировочном) дает возможность регулирования по всей длине направляющих с учетом центра массы груза, перпендикулярно оси вала достигается увеличение пределов регулирования положения центра массы груза, что обеспечивает высокое качество балансировки за счет дисбаланса массы и его габаритных размеров, а это позволяет повысить производительность и точность машин.

Таким образом, применение предложенного устройства регулируемого изменения момента инерции позволит контролируемо изменять момент инерции маховика или другого вращающегося технического устройства.
Имеется возможность накапливания энергии не только при увеличении угловой скорости маховика, но даже при замедленном вращении. В связи с этим необходимо контролируемо увеличивать расстояние от центра масс грузов до оси вращения маховика при замедленном движении, например, автомобиля.
Другая особенность для надежной работы плавающих грузов - это использование роликовинтовой передачи (пары), которая позволяет сделать их самостопорящимися, что позволяет избежать негативного явления центробежной силы на управляемое перемещение грузов.
Накопленную энергию можно использовать для привода генератора автомобиля, отключая его привод от двигателя. После расходования накопленной энергии частота вращения маховика уменьшается до величины, которая позволит переместить плавающие грузы в исходное положение, на минимальное расстояние до оси вращения маховика для следующего цикла работы.
Сведение плавающих грузов при большой частоте вращения маховика не представляется целесообразным, так как на противодействие центробежной силе придется затратить большое количество энергии.
Направляющие с плавающими грузами обеспечивают возможность осуществлять их перемещение независимо друг от друга достаточно просто, что позволяет осуществить балансировку маховика непосредственно во время его вращения, что отсутствует в известном устройстве, которое громоздко и сложно в управлении.
При работе привода вращения маховика достаточно в его опорах установить датчики (не показано), измеряющие нагрузку, передаваемую осью вращения маховика на опоры. Таким образом, зная положение маховика и величину сил, действующих на опоры, можно изменить расстояние каждого плавающего груза от оси вращения таким образом, чтобы маховик оказался сбалансированным, то есть провести статическую балансировку.
Важным фактором предложенного изобретения является возможность балансировать вращающийся маховик независимо от того, был он сбалансирован ранее или нет, а следовательно, расширить диапазон применения маховика. В конструкции нет сложных подвижных и качающихся сопряжений элементов, что повышает надежность и долговечность. Таким образом, расширяются пределы регулирования положения плавающих грузов в направляющих относительно оси вращения маховика, а это, в свою очередь, позволяет с высокой точностью осуществлять изменение расстояние от оси вращения до центра масс грузов во время вращения маховика, обеспечивает требуемую скорость отработки положения исполнительного органа электромеханическим приводом без больших энергетических затрат.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОВИК С РЕГУЛИРУЕМЫМ МОМЕНТОМ ИНЕРЦИИ | 2012 |
|
RU2498127C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2012 |
|
RU2499934C2 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2013 |
|
RU2552403C2 |
| ВЕДУЩАЯ ЗВЕЗДОЧКА ТРАНСПОРТНОГО СРЕДСТВА С МУСКУЛЬНЫМ ПРИВОДОМ | 2016 |
|
RU2627221C1 |
| ШЕСТИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2603878C2 |
| ДЕСЯТИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2604900C2 |
| ВОСЬМИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2603045C2 |
| АМФИБИЙНОЕ СУДНО НА СЖАТОМ ПНЕВМОПОТОКЕ | 2016 |
|
RU2644496C1 |
| ВИНТОВОЙ ПРЕСС С МУФТОВЫМ ПРИВОДОМ | 2005 |
|
RU2312768C2 |
| ПРИВОД МАШИНЫ | 1996 |
|
RU2115845C1 |
Изобретение относится к области машиностроения. Устройство содержит обод, связывающий полумуфты. Полумуфты размещены на валах электродвигателя и начального звена механизма. Обод содержит направляющие с профильным сечением, расположенные диаметрально противоположно относительно вала. Ползуны выполнены в виде плавающих грузов, перемещаемых перпендикулярно оси вращения. Электромеханические приводы перемещают плавающие грузы. Электромеханические приводы содержат шаговый электродвигатель и роликовинтовую пару. Достигается расширение арсенала технических средств. 1 з.п. ф-лы, 1 ил., 1 табл.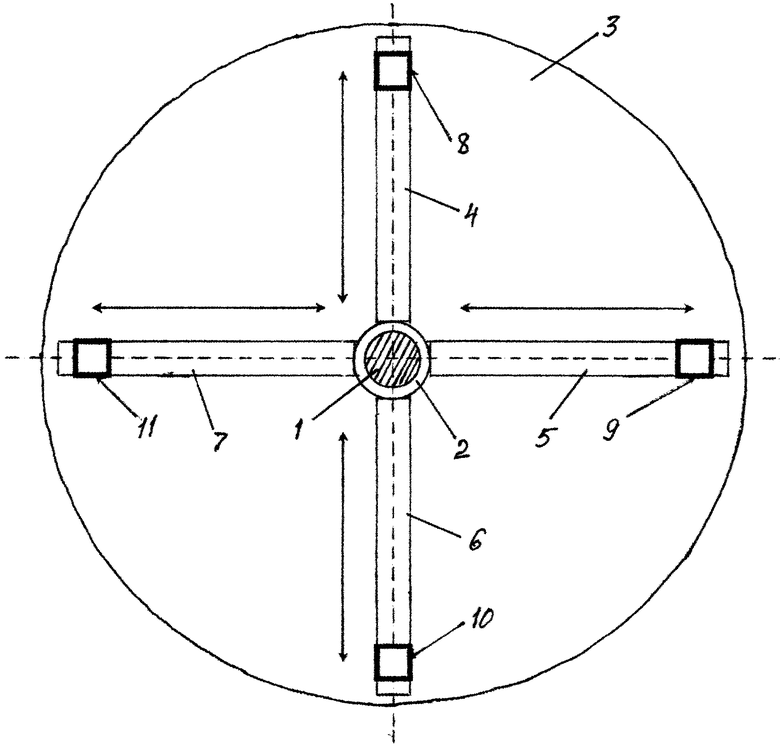
1. Устройство для регулирования изменения момента инерции маховика, составляющее неразрывное соединение с начальным звеном механизма с возможностью уменьшения степени отрицательного влияния неравномерности движения начальным звеном на технические характеристики механизма, содержащее обод, который является связующим звеном для полумуфт, размещенных на валах электродвигателя и начального звена механизма, образуя с ним кинематическую связь; ползуны с возможностью перемещения в радиальных пазах обода образуют с ним поступательные кинематические пары, отличающееся тем, что обод снабжен направляющими с профильным сечением, расположенными диаметрально противоположно относительно вала, а ползуны выполнены в виде плавающих грузов, перемещаемых перпендикулярно оси вращения, с начальным звеном механизма с возможностью их перемещения по направляющим и размещенных между полумуфтами, при этом для перемещения плавающих грузов используют электромеханические приводы, состоящие из шагового электродвигателя и роликовинтовой пары.
2. Устройство по п. 1, отличающееся тем, что плавающие грузы установлены на корпусе обода в равномерно расположенных между собой направляющих с профильным сечением, не менее трех звеньев, с закрепленными на них плавающими грузами.
| МАХОВИК С РЕГУЛИРУЕМЫМ МОМЕНТОМ ИНЕРЦИИ | 2012 |
|
RU2498127C1 |
| US 5099430 A, 24.03.1992 | |||
| US 5269197 A, 14.12.1993. | |||

