(54) ЦЕНТРОБЕЖНЫЙ РЕГУЛЯТОР СКОРОСТИ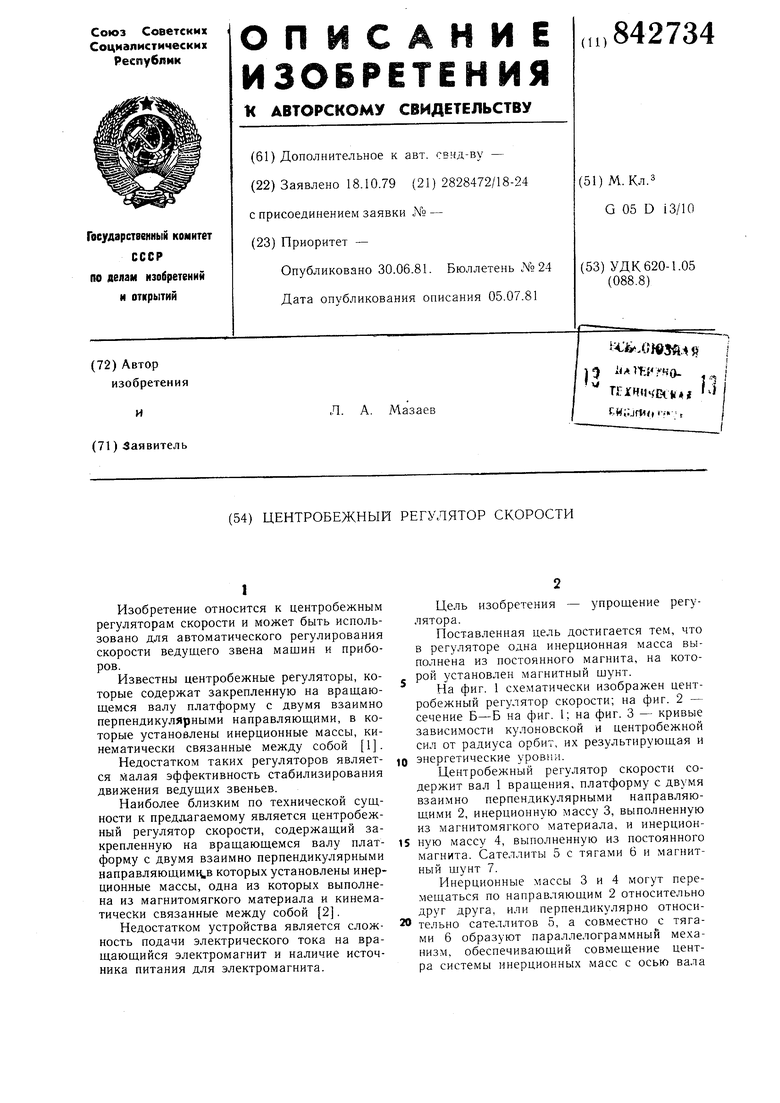
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный регулятор скорости | 1978 |
|
SU763861A1 |
| Центробежный регулятор скорости | 1979 |
|
SU962878A1 |
| Центробежный регулятор скорости | 1982 |
|
SU1016775A1 |
| Центробежный регулятор скорости вала | 1984 |
|
SU1170436A1 |
| Центробежный регулятор скорости вращения | 1985 |
|
SU1273890A1 |
| Учебное пособие по механике | 1982 |
|
SU1067524A1 |
| Учебный прибор по физике | 1981 |
|
SU1001155A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КОСМИЧЕСКИЙ ДВИГАТЕЛЬ | 2021 |
|
RU2767573C1 |
| Центробежный регулятор скорости | 1983 |
|
SU1095145A1 |
| ЭЛЕКТРИЧЕСКИЙ ПАРУС ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2451629C2 |
I
Изобретение относится к центробежным регуляторам скорости и может быть использовано для автоматического регулирования скорости ведущего звена машин и приборов.
Известны центробежные регуляторы, которые содержат закрепленную на вращающемся валу платформу с двумя взаимно перпендикулярными направляющими, в которые установлены инерционные массы, кинематически связанные между собой 1.
Недостатком таких регуляторов является малая эффективность стабилизирования движения ведущих звеньев.
Наиболее близким по технической сущности к предлагаемому является центробежный регулятор скорости, содержащий закрепленную на вращающемся валу платформу с двумя взаимно перпендикулярными направляющим1 в которых установлены инерционные массы, одна из которых выполнена из магнитомягкого материала и кинематически связанные между собой 2.
Недостатком устройства является сложность подачи электрического тока на вращающийся электромагнит и наличие источника питания для электромагнита.
Цель изобретения - упрощение регулятора.
Поставленная цель достигается тем, что в регуляторе одна инерционная масса выполнена из постоянного магнита,, на которой установлен магнитный щунт.
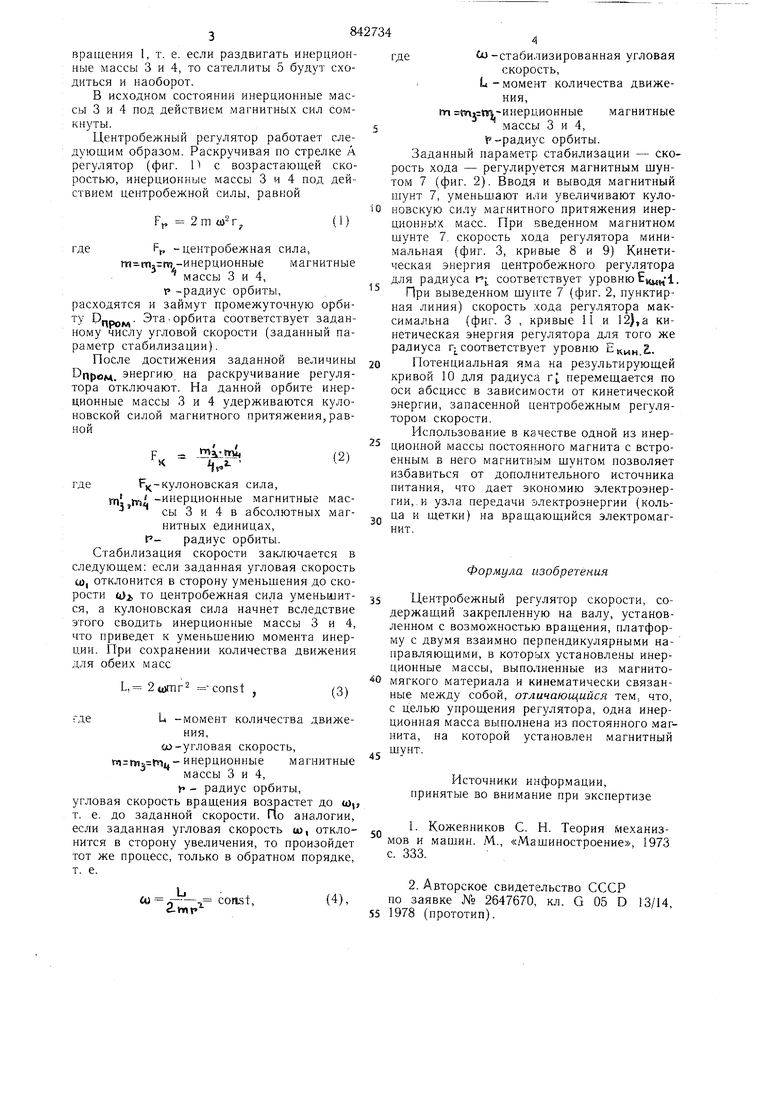
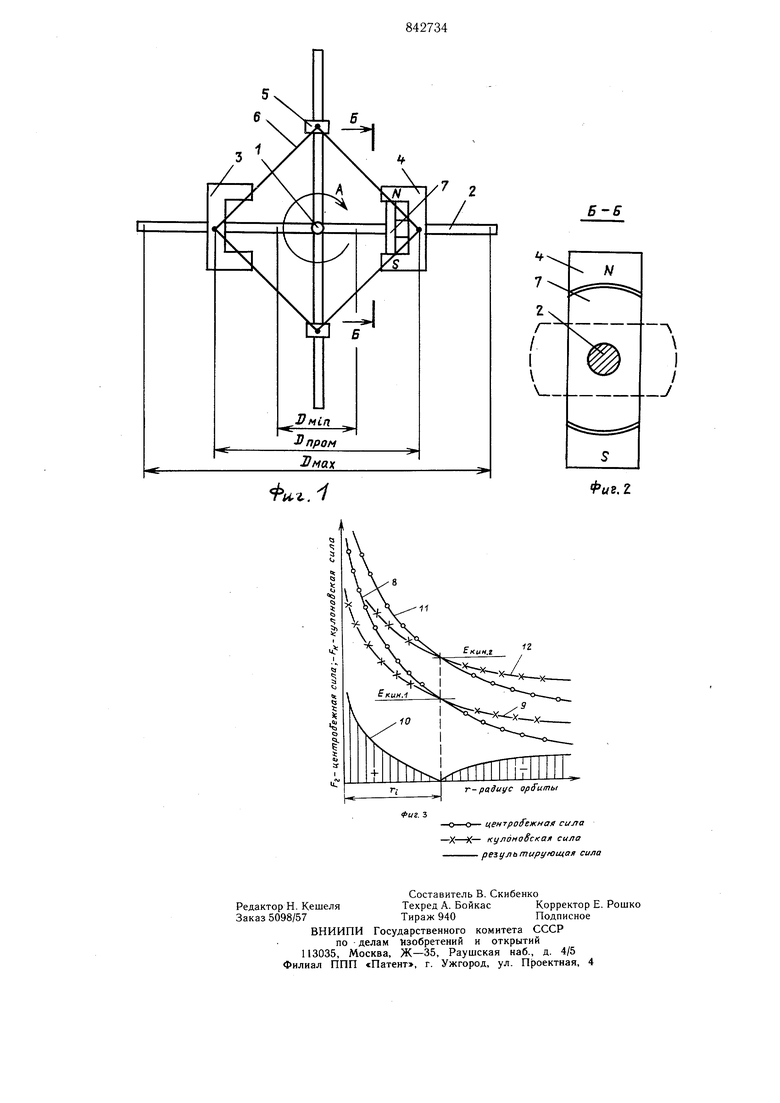
На фиг. 1 схематически изображен центробежный регулятор скорости; на фиг. 2 - сечение Б-Б на фиг. 1; на фиг. 3 - кривые зависимости кулоновской и центробежной сил от радиуса орбит, их результирующая и энергетические уровни.
Центробежный регулятор скорости содержит вал 1 вращения, платформу с двумя взаимно перпендикулярными направляющими 2, инерционную массу 3, выполненную из магнитомягкого материала, и инерционную массу 4, выполненную из постоянного магнита. Сателлиты 5 с тягами 6 и магнитный щунт 7.
Инерционные массы 3 и 4 могут перемещаться по направляющим 2 относительно друг друга, или перпендикулярно относительно сателлитов 5, а совместно с тягами 6 образуют параллелограммный механизм, обеспечивающий совмещение центра системы инерционных масс с осью вала вращения 1, т. е. если раздвигать инерционные массы 3 и 4,- то сателлиты 5 будут сходиться и наоборот. В исходном состоянии инерционные массы 3 и 4 под действием магнитных сил сомкнуты. Центробежный регулятор работает следующим образом. Раскручивая по стрелке А регулятор (фиг. П с возрастающей скоростью, инерционные массы 3 и 4 под действием центробежной силы, равной FP 2т FP -центробежная сила, ,го-инерционные магнитные массы 3 и 4, р-радиус орбиты, расходятся и займут промежуточную орбиту (|- Эта,-орбита соответствует заданному числу угловой скорости (заданный параметр стабилизации). После достижения заданной величины DnpoM. энергию, на раскручивание регуля-; тора отключают. На данной орбите инерционные массы 3 и 4 удерживаются кулоновской силой магнитного притяжения, равнойf J illTU Н Р,(-кулоновская сила. т mi -инерционные магнитные массы 3 и 4 в абсолютных магнитных единицах, Р- радиус орбиты. Стабилизация скорости заключается в Следующем: если заданная угловая скорость Ш| отклонится в сторону уменьшения до скорости a)i то центробежная сила уменьшится, а кулоновская сила начнет вследствие этого сводить инерционные массы 3 и 4, что приведет, к уменьшению момента инерции. При сохранении количества движения для обеих масс L, -const , гдеL -момент количества движеа -угловая скорость, .-инерционные магнитные массы 3 и 4, г - радиус орбиты, угловая скорость вращения возрастет до ш т. е. до заданной скорости. По аналогии, если заданная угловая скорость Ш| отклонится в сторону увеличения, то произойдет тот же процесс, только в обратном порядке, т. е. СО Xv const, гдеСо-стабилизированная угловая скорость, U - момент количества движения, т т1 пг1-инерционные магнитные массы 3 и 4, f-радиус орбиты. Заданный параметр стабилизации - скорост{ хода - регулируется магнитным щунтом 7 (фиг. 2). Вводя и выводя магнитный шунт 7, уменьщают или увеличивают кулоновскую силу магнитного притяжения инерционных масс. При введённом магнитном шунте 7. скорость хода регулятора минимальная (фиг. 3, кривые 8 и 9) Кинетическая энергия центробежного регулятора для радиуса гч соответствует уровню Ещ,„1. При выведенном щунте 7 (фиг. 2, пунктирная линия) скорость хода регулятора максимальна (фиг. 3 , кривые 11 и 12),а кинетическая энергия регулятора для того же радиуса г соответствует уровню Екин.2.. Потенциальная яма на результирующей кривой 10 для радиуса rj. перемещается по оси абсцисс в зависимости от кинетической энергии, запасенной центробежным регулятором скорости. Использование в качестве-одной из инерционной массы постоянного магнита с встроенным в него магнитным щунтом позволяет избавиться от дополнительного источника питания, что дает экономию электроэнергии,, и узла передачи электроэнергии (кольца и щетки) на вращающийся электромагФормула изобретения Центробежный регулятор скорости, содержащий закрепленную на валу, установленном с возможностью вращения, платформу с двумя взаимно перпендикулярными направляющими, в которых установлены инерционные массы, выполненные из магнитомягкого материала и кинематически связанные между собой, отличающийся тем, что, с ц;елью упрощения регулятора, одна инерционная масса выполнена из постоянного магнита, на которой установлен магнитный щунт. Источники информации, принятые во внимание при экспертизе 1.Кожевников С. Н. Теория механизмов и машин. М., «Машиностроение, 1973 с. 333. , 2.Авторское свидетельство СССР по заявке № 2647670, кл. G 05 D 13/14, 1978 (прототип).
