Изобретение относится к электротехнике и может быть использовано для управления электроприводами механизмов подач станков, робототехни- ческих комплексов.
Цель изобретения - улучшение динамических характеристик электропривода по управляющему воздействию,
На чертеже приведена функциональная схема электропривода с подчиненным регулированием параметров.
Электропривод с подчиненным регулированием параметров содержит электродвигатель 1, подключенньш к регулируемому преобразователю 2, систему управления с последовательно вклю-: ченными пропорционально-интегральными регуляторами скорости 3 и тока 4 к вxJЭдaм которых подключены соответственно выходы датчиков скорости 5 и тока 6, последовательно включенные блок 7 сравнения, пороговьй элемент 8, при этом входы блока 7 сравнения подключены к выходам датчика 5 скорости и задатчика 9 скорости, последний подключен также к входу дифференцирующего звена 10, выходом соединенного с входом усилителя 1 1 с переменным коэффициентом усиления, выход которого подключен к входу регулятора 4, а управляющий вход - к выходу порогового элемента 8.
Кроме того, электропривод содержи второе дифференцирующее звено J2, второй пороговый элемент 13 и последовательно соединенные третье дифференцирующее звено 14 и второй усилитель 15 с переменным коэффициентом усиления, выход которого соединен с входом регулятора тока 4, вход третьего дифференцирующего звена 14 подключен к выходу первого дифференцирующего звена 10, выход блока 7 сравнения через второе дифференцирующее звено 12 и второй-пороговый элемент 13 соединен с управляющим входом второго усилителя 15.
Электропривод работает с подчиненным регулированием параметров следующим образом.
Последовательно соединенные регулятор 3 скорости, регулятор 4 Тока регулируемый преобразователь 2, двигатель 1 и датчики скорости 5 и то- ка 6 образуют двухконтурную систему с подчиненным регулированием параметров .
0
5
В электропривод включен контур регулирования по производным от задающего сигнала, включающий в себя блок 7 сравнения, пороговый элемент 8, первое дифференцирующее звено 10, усилитель II с переменным коэффициентом усиления, третье дифференцирующее звено 14, второй усилитель 15 с переменным коэффициентом усиления, второе дифференцирующее звено 12, второй пороговьш элемент 13.
При поступлении на вход регулятора 3 скорости сигнала - задания от задатчика 9 скорости, электропривод
5 отрабатьгоает рассогласование между этим сигналом и сигналом, поступающим с датчика 5 скорости. Па вход регулятора 4 -тока поступают сигналы с выхода регулятора 3 скорости-,, с датчика 6 тока и сигналы, пропорциональные производным от задающего сигнала, которые поступают через |Дифференцирующее звено 10 и усилитель 11 с переменным коэффициентом усиления, через третье дифференцирующее звено 14- и усилитель 15 с переменным коэффициентом усиления, Величина коэффициента усиления усилителя 11 и соответственно величина первой производной от задающего сигнала регулируется в функции ошибки регулирования в электроприводе, которая формируется блоком 7 сравнения и пороговым элементом 8. Величина
5 коэффициента усиления усилителя 15 и соответственно величина второй производной от задающего сигнала регулируется в функции производной от ошибки регулирования в электроприводе, которая формируется вторым дифференцирующим звеном 12 и пороговым элементом 13.
В режиме, когда переходная характеристика по скорости вращения совпадает с заданной переходной характеристикой, ошибка регулирования и ее производная малы по величине. При этом сигнал на выходе блока 7 сравнения не превышает зону нечувствительности порогового элемента 8, и сигнал на выходе второго дифференцирующего звена 12 также не превьшгает зону нечувствительности второго порогового элемента 13. В этом случае на управляющие входы усилителей с переменным коэффициентом усиления 11, 15 сигналы не поступают, последние имеют мальм коэффициент усиления.
0
0
5
0
5
Сигналы, пропорциональные первой и второй производной от задающего сигнала, на вход регулятора тока 4 не поступают. При этом электропривод отрабатьшает рассогласование по скорости с заданием на ток, поступающим только с выхода регулятора 3 скорости.
При несоответствии заданной переходной характеристики по скорости и действительной скорости вращения появляется большая ошибка регулирования на выходе блока 7 сравнения-и этот сигнал превьшает зону нечувствительности порогового элемента 8, выходной сигнал которого увеличивает коэффициент усиления усилителя 11. При этом возрастает и величина сигнала первой производной от задающего сигнала, получаемого первым дифферен цирующим звеном 10, и увеличенный сигнал поступает на вход регулятора 4 тока. При ошибке регулирования, получемой на выходе блока 7 сравнения, равной постоянр1ой величине или медленно изменяющейся во времени сигнал на выходе второго дифференцирующего звена 12 не превышает зону нечувствительности порогового элемента 13, на выходе которого сигнал равен нулю. При этом коэффициент усиления усилителя 15 равен нулю.и сигнал пропорциональный второй производной от задающего сигнала, получаемой на выходе третьего дифференцирующего звена 14, также равен нулю. Таким образом, при ошибке регулирования равной постоянной величине или медленно изменяющейся во времени в системе электропривода действует только первая производная от выходного сигнала задатчика 9 скорости, форсируя динамические процессы в электроприводе.
При ошибке регулирования, изме- няющейся быстро во времени, на выходе второго дифференцирующего звена 12 появляется сигнал большой по величине, который превьпиает зону нечувствительности порогового элемента 13. При этом сигнал на выходе порогового элемента 13 увеличивает коэффици
ВНИИПИ Заказ 1638/52
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
O
5
0 0 0
ент передачи усилителя 15. Дважды продифференцированный сигнал от задатчика 9 скорости через дифференцирующие звенья 10, 14 и усиленный усилителем 15 поступает на вход регулятора 4 тока вместе с сигналом первой производной с выхода усилителя 11. В этом случае в электроприводе вводятся две производные от задающего сигнала и обеспечивается большая (полная) инвариантность по управляющему воздействию, происходит форси- ровка динамических процессов в электроприводе и улучшаются динамические показатели, а именно расширяется полоса пропускания частота и уменьшается время переходных процессов в электроприводе.
i
Таким образом, данный электропривод с подчиненным регулированием параметров позволяет существенно улучшить динамические характеристики по управляющему воздействию за счет введения первой и второй производной от задающего сигнала на вход регулятора тока при учете ошибки регулирования по скорости в электроприводе и ее производной.
Формула изобретения
Электропривод с подчиненным регулированием параметров по авт. св. 5 № 1239819, отличающийся тем, что, с целью улучшения динамических характеристик по управляющему воздействию в него дополнительно введены второе дифференцирующее звено., второй пороговый элемент и последовательно соединенные третье дифференцирующее звено и второй усилитель с переменным коэффициентом усиления, выход которого соединен с входом регулятора тока, вход третьего дифференцируюп1;его звена подключен к выходу первого дифференцирующего звена, выход блока сравнения через второе дифференцирующее звено и второй пороговьй элемент соединен с -управляющим входом второго усилителя с пе- ременньм коэффициентом усиления.
Тираж 661
Подписное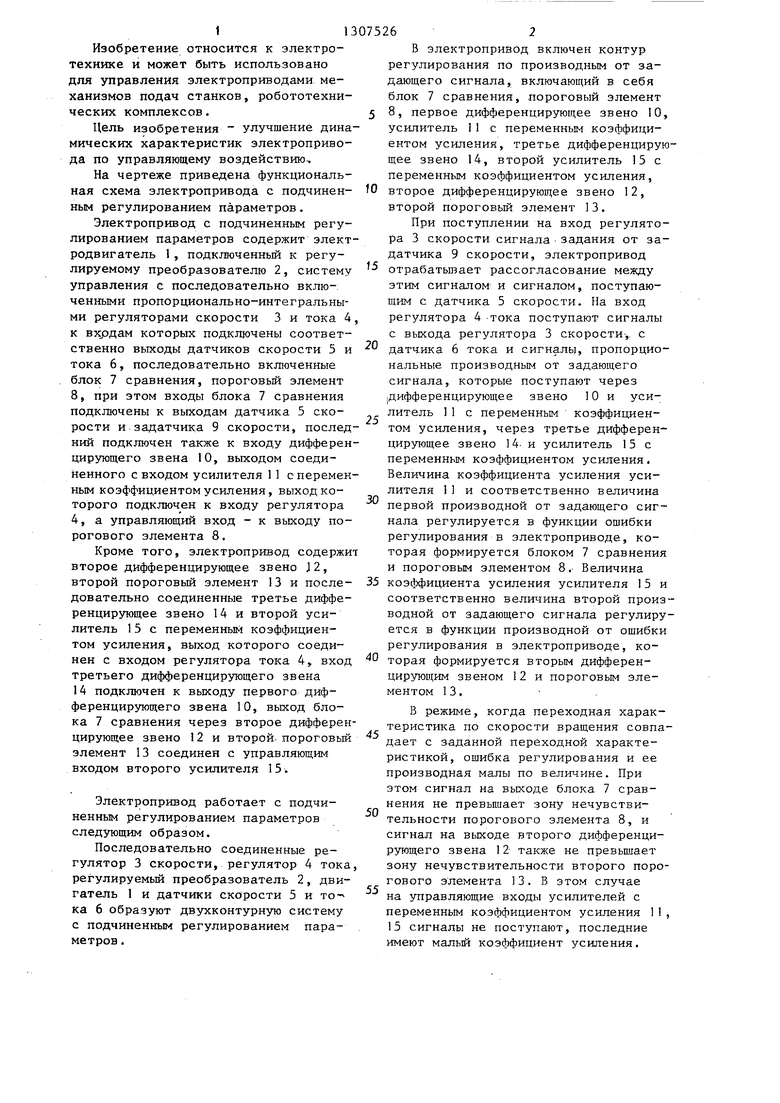
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1239819A1 |
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| Самонастраивающаяся система регулирования скорости | 1984 |
|
SU1180844A2 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1001405A1 |
| Устройство для управления электроприводом постоянного тока | 1980 |
|
SU900392A1 |
| Задатчик интенсивности для быстродействующего электропривода | 1980 |
|
SU900389A1 |
| Задатчик интенсивности для быстродействующего электропривода | 1982 |
|
SU1073866A2 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU783938A1 |
Изобретение относится к -электротехнике и может быть использовано для управления электродвигателями механизмов подач станков и робото- технических комплексов, является дополнительным изобретением к авт. св. № 1239819. Улучшение динамических характеристик по управляющему воздействию обеспечивается за счет введения последовательно соединенСЕН- 01 ных третьего дифференцирующего звена 14 и второго усилителя 15 с переменным коэффициентом усиления, выход которого соединен с входом регулятора тока 4. Вход третьего дифференцирующего звена 14 подключен к выходу первого дифференцирующего звена 10, выход блока сравнения 7 через второе дифференцирующее звено 12 и второй пороговый элемент 13 соединен с управляющим входом второго усилителя 15. В данном электроприводе осуществляется введение на вход регулятора тока 4 сигналов, пропорциональных первой и второй производных от задающего сигнала причем первая производная вводится, когда ошибка по скорости вращения превысит пороговое значение, и регулируется в функции этой ошибки, а вторая производная от задающего сигнала вводится, когда производная от ошибки по скорости вращения превысит пороговое значение и регулируется в функции производной от ошибки по скорости. 1 ил. с (О (Л со о -vj ГЧ)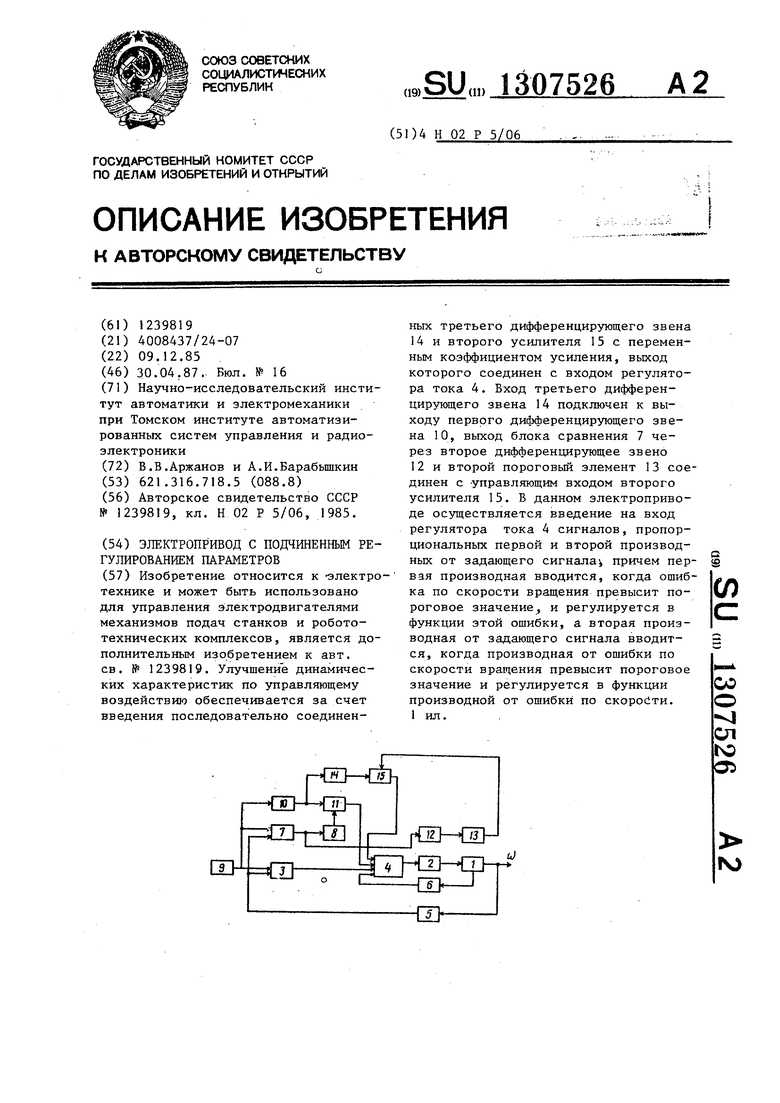
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1239819A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
