(54) ЭЛЕКТРОПРИВОД С ПОДЧИНЕННЫМ РЕГУЛИРОВАНИЕМ
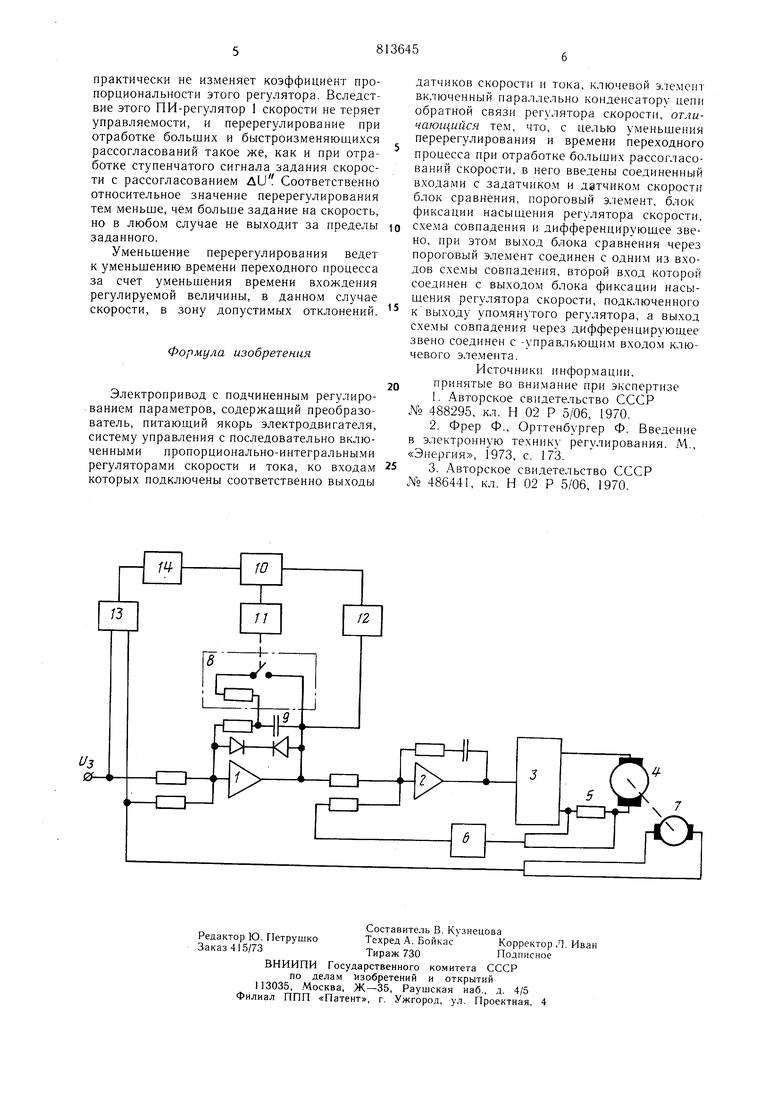
ПАРАМЕТРОВ СИ при нозраетании пульсации скорости выujc допустимого значепия. Такой электропривод эффектпвеп в режиме стаби.шзгшии скорости ,ения. При отработке сигиала управлеипя такой электропривод ведет себя как однократно иптегрирующая система, если срабатывает реле, или как обыкповепП:1я двукратпо интегрирующая, если в нем предусмотрена блокировка срабатывания реле от изменения скорости вследствие управляюн1его сигиала. В нервом случае будет занижена динамика при отработке малых рассогласований и будет наблюдаться скоростная оижбка, т. е. преимущество электропривода, построенного по двукратно интегрируюп ей системе подчиненного регулирования параметров, заключаюп ееся в более высокой динамической точности, будет сведено на нет. Во втором случае ирп больших сигналах рассогласования будет наблюдаться нотеря управляемости ПИ-регулятора скорости при выходе его из насыщепия 3. Недостатком этого электропривода является больпюе перерегулирование и время переходного процесса при отработке больших и быстроизменяюии1хся рассогласований. Цель изобретения - уменьшение перерегулирования и времени переходного нроцесса ири отработке больших раесогласова 1ий скорости. Для достижения цели в электроприводе с нодчипепиым регу.:гированием параметров, включающим преобразователь, ггитаюш,ий якорь электродвигателя, систему управления с гюследовате;1ьио включенными пропорционально-интегральными регуляторами скорости и тока, датчики скорости и тока, ключевой э; емепт, включенный пара;1;1ельно кондепсатору цени обратной связи регулятора скорости, выход схемы совпадения соединен с управляюшим входом к,почевого э.лемеита через дифс)ерепцирующее звеио, причем выход ПИ-регулятора скорости соединен с первым входом схемы совпадения через блок фиксации насын1епия ПИ-регулятора скорости, а второй вход схе.мы совпадения через пороговый эле.мепт и блок сравнения соединен с задатчиком и датчиком скорости. На чертеже изображена блок-схема электропривода с подчиненным регулированием пара.метров. Электропривод содержит ПИ-регулятор 1 скорости, выход которого соединен с первым входом ПИ-регулятора 2 тока, преобразователь 3, нитаюший якорь электродвигателя 4, примел вход преобразователя 3 соединен с выходом ПИ-регулятора 2 тока, шунт 5 выход которого через датчик 6 тока подключен ко второму входу ПИ-регулятора 2 тока, тахогенератор 7, установленный на валу двигателя 4, и соединенный со BToptiiM входом регулятора 1 скорости, ключевой эле мент 8, Ц унтруюшй конденсатор 9, схему 10 совпадения, выход которой подключен через дифференцирующее звено 11 к управляющему входу ключевого эле.мента 8, блок 12 фиксации насыщения ПИ-регулятора скорости, через который выход ПЙ-рег)-лятора 1 скорости соединен с первым входом схемы 10 совпадения, блок 13 сравнения и пороговый элемент 14, выход которого подключен ко второму входу схемы 10 совпадения, а входы блока is сравнения -т- ко входам ПИ-регулятора 1 скорости. При этом блок фиксации насыщения регулятора скорости включает в себя нелинейный элемент с зоной нечувствительности. Электропривод работает следующим образом. Допустим, что ПИ-регулятор 1 скорости иаходится в насыщении. Па вход ПИ-регулятора 2 тока поступает сигнал максимального задания на ток и электропривод отрабатывает рассогласование. С выхода блока 12 на первый вход схемы 10 совпадения приходит потенциал «1, сигнализирующий о том, что ПИ-регулятор 1 скорости находится в насьццении, а с выхода порогового элемента 14 на второй вход схемы 10 совпадения поступает потенциал «О, означающий что рассогласование ДУ Uj - LTT AU Ири этом с выхода схемы 10 совпадения сиимается потенциал «О. На управляющий вход ключевого элемепта 8 с дифференцирующего звена 11 приходит также нулевой нотенциал и ключевой элемент 8 размыкается. Пусть сигнал задания скорости имеет ступеичатую форму и рассогласование ди /Uj - Утг ( является максимально допустимым из условия сохранения управляемости ПИ-регулятора 1 скорости. При равенстве рассогласования ДЬ /из - итг/ ли (0,4 - 0,3) ли с порогового элемента 14 на второй вход cxe.Vibi 10 совпадения подается нотепциал «1. Схе.ia И) совпадения скачком перебрасывается в HOB(je состояние, и па вход дифференцирующего звена 11 поступает сигнал в виде ступеньки. И.мпульс, образующийся на выходе дифференцирующего звена 11, поступает на управляющий вход ключевого элемента 8, при этом конденсатор 9 щунтируется через замкнутый ключевой э.те.мент 8. Длительность импульса, замыкаюц.|его ключевой элемент 8, немного меньше времени, необходимого электроприводу для отработки рассогласования ли до нуля. При этом постоянная времени разряда конденсатора 9 такова, что конденсатор за время, равное длительности и.мпульса, успевает разрядиться практически полностью. Для ограничения тока разряда конденеатора последовательно с ком.мутирующими контакта.ми в ключевом элементе 8 включен резистор, сопротивление которого на несколько порядков меньще сопротивления резистора в цепи обратной связи ПИ-регулятора 1 скорости и который
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1239819A1 |
| Электропривод с подчиненным регулированием параметров | 1985 |
|
SU1307526A2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
| Регулятор | 1975 |
|
SU714349A1 |
| Система подчиненного регулирования | 1981 |
|
SU983955A1 |
| Задатчик интенсивности для быстродействующего электропривода | 1980 |
|
SU900389A1 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| Задатчик интенсивности для быстродействующего электропривода | 1982 |
|
SU1073866A2 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
