Изобретение относится к исгпгтани и диагностике двигателей внутреннег сгорания. Известны способы определения пол хения поршня двигателя внутреннего сгорания, заключающиеся а том, что подают с одной стороны цилиндра дви гателя измерительный сигнал от излу -(ателя, принимают сигнал с другой :;тороны цилиндра при помощи щзеобра гювателя, детектируют сигнал, усили пают его, выделяют при помощи анали атора фронт и спад зарегистрирован Ього сигнала, по которым определяют гюложение поршня Clj. Недостатками данного способа являются его сложность, а также повы1иенная опасность, связанная с работой радиоактивных изотопов. Целью изойрЭтени я является упрощение и пoвыlIJeниe безопасности , Указанная цель достигается тем, что согласно способу в качестве измерительного сигнала от излучателя подают поток ультразвуковой энергии принятый сигнал преобразуют в высокочастотный модулированный сигнал, а перед детектированием фильтруют сигнал при помощи высокочастотного филь ра несущей частоты. На фиг. 1 показана схема устройст ва для его реализации; на фиг, 2 форма кривой принятого высокочастотного сигнала при движении поршня от нижней мертвой точки (НМТ) до верхней мертвой точки (ВМТ) и обратно; на фиг, 26 - форма кривой продетекти рованного принятого сигнала (низкочастотной составляющей) ; на фиг. 2 В определение ВМТ по середине интервал 11Е)Одетектированного принятого сигнала. Устройство содержит излучатель 1;, ПЕ: еобразователь 2, установленный у поршня 3 на стенке цилиндра 4, Устройство измерения положения поршня работает следующим образом.. Колебания, генерируемые генерато ром ультразвуковой частоты и посылаемые излучателем 1, распространяются узким пучком через цилиндр 4, где поршень 3 совершает периодические поступательные движения от НМТ д ВМТ, и попадают в преобразователь 2, где- преобразуются в высокочастотный модулированный электрический сигнал, который затем поступает на вход полосового высокочастотного фильтра не сущей частоты, имеющего полосу кания ffift-tAF, где fнес частота не сущей, а Гд, - частота модуляции, Частота несущей может быть в пределах 100 кГц - 10 11Гц. Выделенный сиг нап детектируется, усиливается усиди тепем низкой частоты и подаетсв в анализатор, с выхода которого сигнал поступает на индикатор, который выда ет информацию о положении порщня и состоянии цилинд|:)опоршневой группы дзи гателя , Таким образом, предлагаемый способ поэволпет на работающем двигателе гфоизводить определение истинного положения поршня в определенный момент времени и диагностировать состояние цилиндропоршневой группы (степень износа колец,, поршня, цилиндра,- пригорание колег; и т.д.) в отличие от известного, согласно которому не осуществляется ;аиагностика состояния цклиндропориневой группы вообще и определяетси положение поршня сложными средствами, Ультразвуковые колебания в однородной среде распространяются направленпо и без существенных затуханий, а на границе раздела двух сред отражаются, преломляются, затухают в зависимости от тлотности граничадшх веществ. Причем направленность ультразвуковых колебаний зависит от соотношения диаметра излучателя (d) и длины волны (л) , чем больше сЗ/ , тем уже диаграм)-а .-{апраБдег ности . Если условия расзтространения у11ьтразвука, меняются во аременк (например, коэффициент отражения) то имеет место модуляция ультразвукового сигнеита в соответствии с изменением условий распространения, Позто-му поступательное движение поршня 33 цилиндре от ВМТ к НКТ приводит 1C ко-дуляции ультрг)звуковых колебаний, проходя цих через него. Когда поршень ;-1ахоД11тся ниже уровня расположения датчиков (иэлучат У1Я и преобразоваТвля) , приемник ультразвуковых колеба)ий фиксирует определенный первоначальный уровень, В MoivieHT прохожде ия верхней кромки порщня уровня установки ультразвуковых датчиков наблюziaeiCH скачек уроЕня сигнала, а за;гем по мере продвижения поршня уро- вень принимаемого ск1нала изменяется (увеличивается), фиксируя прохождение колец поршня (фиг, 2G), Уровень и форма принимаемого сигнала лают информацию не только о лоложенир-; поршня в определенной точке и в определенный момент времени например определение положения ВМТ путем формирования середины интервала прохождения 1зерхней кромки поршня относительно уровня установки датчиков (фиг, 25)f но и о степени прижима поршня, колец и гильзы цилиндра, что характеризует степень износа и состояние этих поверхностей и позволяет да.аать оценку и осуществлять диагкосгкку цилиндропоршневой группы. При пригорании колец и слабом прижиме поршня к стенкам цилиИЛ ра наблюдаются уменьшение пикоа и изменение фОрг-лы кривой по сравнению с эталонным сигналом,.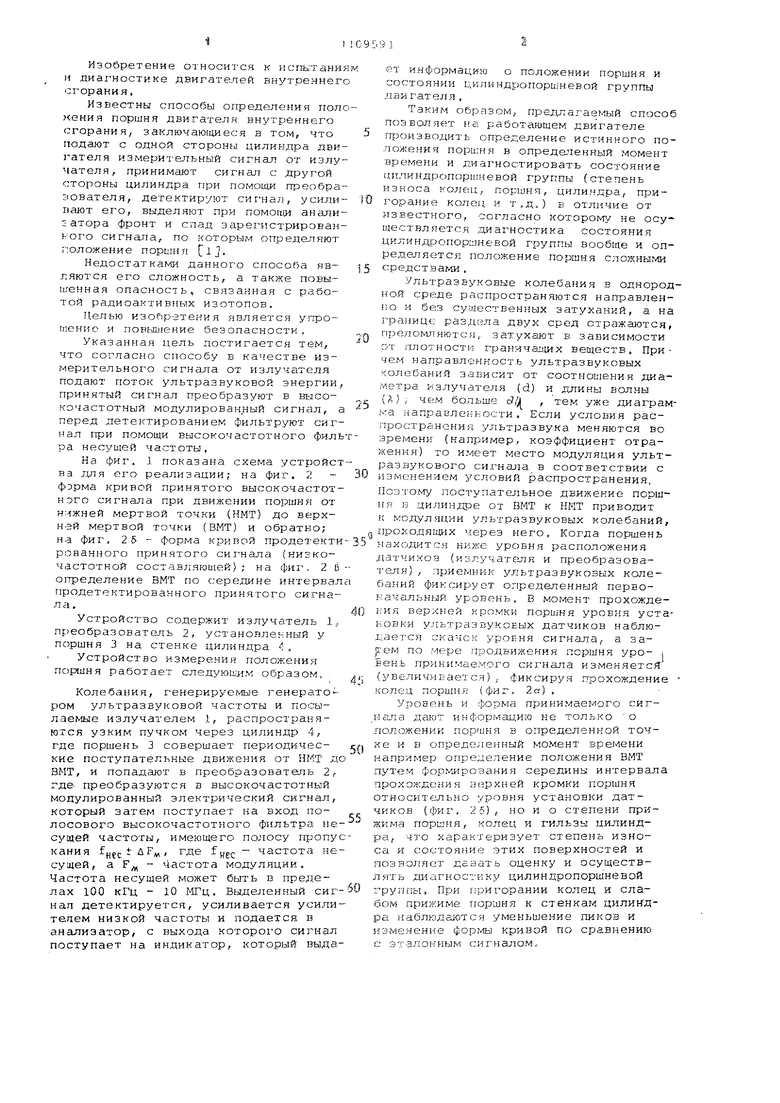
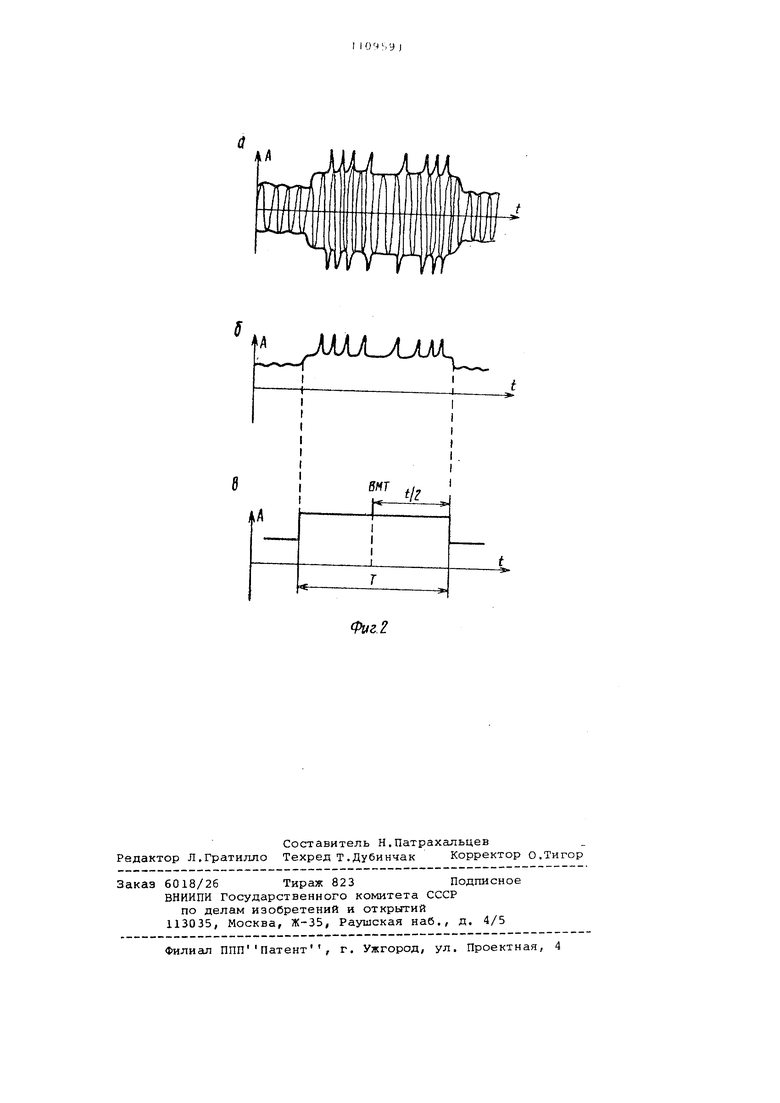
СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОРШНЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, заключающийся в том, что полают с одной стороны цилиндра двигателя измерительный сигнал от излучателя, принимают сигнал с другой стороны цилиндра при помощи преобразователя, детектируют сигнал, усиливают его, выделяют при помощи анализатора фронт к спад зарегистрированного сигнала, по которым определяют положение поршня, отличающи йс я тем, что, с целью упрощения и повышения безопасности, в качестве измерительного сигнала от излучателя подают поток ультразвуковой энергии, принятый сигнаш преобразуют в высокочастотный модулированный сигнал, а перед детектированием фильтруют сигнал при помощи высокочастотного фильтра несущей частоты. г -г f-r;о С71 
I J UAA-AIAI
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
