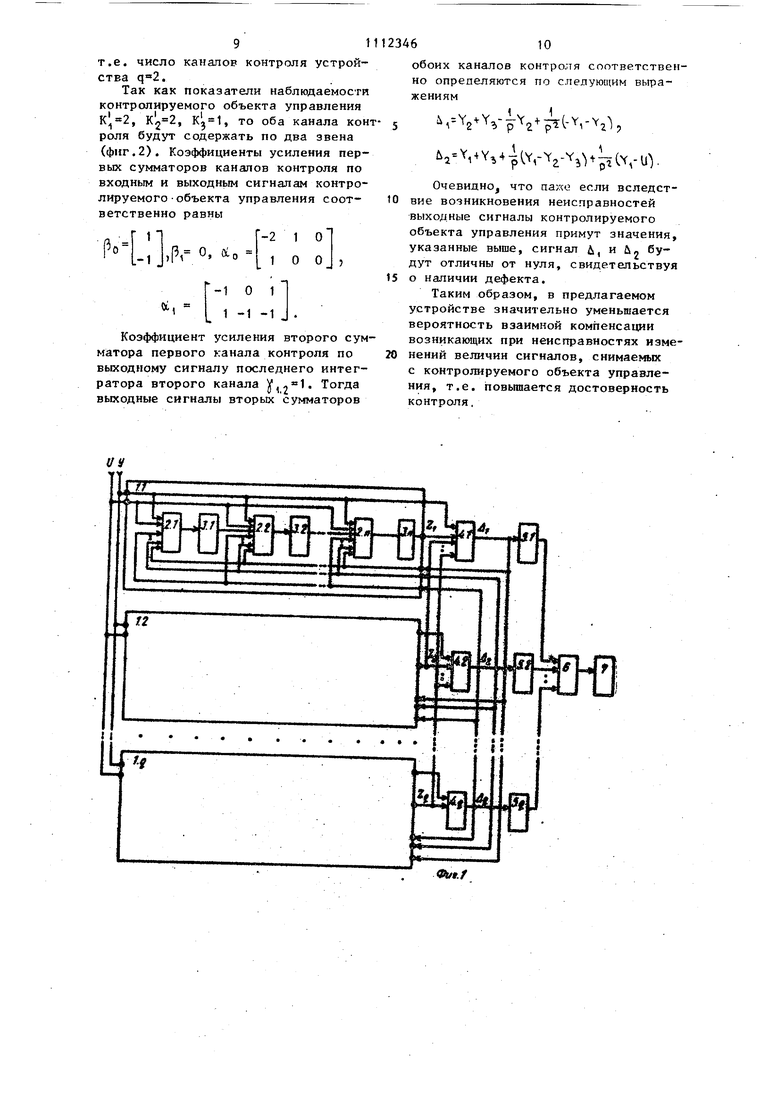
1 Изобретение относится к коитрсЭиТь но-измерительной технике, а именно к устройствам для контроля систем управления, и может быть использова но при функциональном контроле технических объектов. Известно устройство для функционального контроля систем управления содержащее эталонную модель, подключенную параллельно системе управ ления, причем математическое описан модели соответствует математическом описанию объекта контроля, блок сравнения, ограничитель, интегратор логический пороговый блок lj . Недостатками устройства являются сложность эталонной модели, порядок которой равен порядку проверяемой системы управления, а также невысокая достоверность контроля. Наиболее близким по технической сущности к изобретению является уст ройство идентификации линейного объекта управления, содержащее блок индикации и канап идентификации, состоязий из п звеньев, каждое из которых содержит первый сумматор и соединенный с его выходом интегратор, и второго сумматора, подключенного вторым входом к выходу инте ратора последнего звена, первые входы второго сумматора соединены с первыми входами первых сумматоров ;и с выходами блоков контролируемого линейного объекта управления, входами соединенного со вторыми входами первых сумматоров и третьим входом второго сумматора, третьи входы первых ..сумматоров каждого звена, кроме первого, соединены с выходом интегратора предыдущего звена, блок индикации подключен к выходу второ.го сумматора. Число звеньев п в канале идентификации равно максимальному порядку.m линейных блоков объекта 2J , . В случае исправности объекта управления и равенства коэффициенто сумматоров устройства параметрам объекта выходной сигнал устройства U равен нулю. При возникновении неисправности в i-м блоке объекта управления выходной сигнал этого рлока равен У /у Y- + ду;, где uY;; - изменение выходного сигнала i-ro блока -У, вследствие неисправности. 6 Тогда на выходе устройства пояиится сигнал рассогласования, равный .,,.,, оператор интегрирования. , J ° коэффициенты усиления устройства по выходному сигналу i-ro звена. Это приводит к тому, что загорится световое табло блока индикации, сигнализирующее о появлении неисправности . Однако может позникнуть ситуация, когда неисправность возникнет не в одном блоке, а в нескольких, причем таким образом, что изменения выходных сигналов этих блоков взаимно компенсируются в сумматорах устройства и выходной сигнал Д последнего останется неизменсным, т.е. равным нулю. В этом случае вознитсшие неисправности не будут выявлены, что снижает достоверность контроля с помощью указанного устройства. Целью изобретения является повышение достоверности результатов контроля . Поставленная цель достигается тем, что в Устройство для функционального контроля линейного объекта управления, содержащее блок индикации, канал контроля, состоящий из П звеньев, каждое из которых содержит первый сумматор и соединенный с его выходом интегратор, и второго сумматора, подключенного вторым входом к выходу интегратора последнего звена, первые входы второго сумматора соединены с первыми входами первых сумматоров и с выходами контролируемого линейного объекта управления, входами соединенного со вторыми входами первых сумматоров, третьи входы первых сумматоров каждого звена, кроме первого, соединены с выходом интегратора предыдущего звена, введены (С,-1) каналов контроля, идентичных по структуре первому каналу контроля, q пороговых элементов и элемент ИЛИ, выходом подключенный к входу блока индикации, а входами связанный с выходами Q пороговых элементов, вход каждого из которых соединен с выходом второго сумматора данного канала контроля, а также с одним из третьих входов первого сумматора первого звена и с одним из четвертых входов первого сумматора остальных звеньев всех каналов контроля, а третьи входы второго сумматора каждого канала контроля, кроме последнего, соединены соответственно с выходами интеграторов последних звеньев всех последующих каналов контроля. На фиг. 1 приведена структурная схема предлагаемого устройства для функционального контроля линейного объекта управления с произвольным числом выходов; на фиг. 2 - структур ная схема предлагаемого устройства для функционального контроля линейного объекта управления, состоящего из трех блоков, пример. Устройство для функционального Контроля линейных объектов управления содержит каналы контроля 1.1-lQ каждый из которых состоит из п звеньев, включающих первый сумматор 2 и соединенный с его выходом интегратор 3, и второго сумматора 4, подклю ченного вторым входом к выходу интег ратора 3 последнего звена. При этом число звеньев п в каждом из каналов контроля равно показателям наблюдаемости контролируемого линейного объекта управления в порядке их возрастания. Кроме того, устройство содержит пороговые элементы 5.1-5.с элемент 1ШИ 6 и блок 7 индикации. В каждом канале первые входы первых сумматоров 2.1-2. псоединены с первыми входами второго сумматора 4 и с выходами контролируемого объекта управления, входами соединенного со вторыми входами первых сумматоров 2.1-2.П, третьи входы второго суммаТора 4 каждого канала контроля, кроме последнего, соединены с выходами интеграторов 3 последних звенье всех последующих каналов контроля, выход второго сумматора 4 соединен с одним из третьих входов первого сумматора 2.1 первого звена и с одним из четвертых входов первого сумматора остальных звеньев всех ка налов контроля и через соответствую щий пороговый элемент 5 подключен к входу элемента ИЛИ 6. Выход послед него соединен с входом блока 7 инди кации. Число звеньев п , число каналов контроля а и коэффициенты усиления первых 2 и вторых 4 сумматоров может быть определено следующим образом. Пусть контролируемый объект упрапления задан своим описанием в пространстве состояний XCt)rAX(t)+BV(V VW CX(t-), где V - m вектор входа; V-S вектор выхода X - п вектор состояния, А, В, С - известные матрицы. Знание матриц А, В, С позволяет определять такие характеристики объ- екта управления, как устойчивость, управляемость, наблюдаемость, а также находить численные значения показателей наблюдаемости К,,...,К, характеризующих размерность векторов состояния подсистем, на которые может быть декомпозирован объект управления . Чтобы найти показатели наблюдаемости, записывают матрицу наблющаемости)(...)Т. Затем анализируют линейную зависимость столбцов матрицы D. Если столбец (С, А) является линейной комбинацией предшествующих столбцов, а столбец (С, А ) таким свойством не обладает, то говорят, что число К 1 является первым показателем наблюлаемости. Аналогично вполняют анализ столбцов (С2А) ,.. (СсЛМ . Таким образом, анализируя матрицу D, устанавливают совокупность целых чисел . Записывая их в порядке возрастания, получают последовательность Число q определяет число каналов контроля в предлагаемом устройстве и выбирается, исходя из требуемой достоверности контроля, а число Kg.,,... .К - число звеньев п в кажяом из каналов, Коэффициенты усиления первых сумматоров 2.1-2,п по выходньм сигналам объекта управления Y,...,Yg обозначаются , i 1, q, j О, п-1 и определяются в соответствии с выражением . ,,n-t.w , где Т - i-ая строка матрицы Т, которая равна где EQ - единичная матрица размерности q q. Числа ;fgp , 1 1 ,q-1 j P 27 характеризуют значения коэффициентов усиления вторых сумматоров 4.1-4.q по выходным сигналам п-ых интеграторов 3 каядого канала контроляi М - матрица размерности q S, задаваемая в соответствии с требуемой досГоверностью контроля. В частности, матрица М может быть задана аналогично проверочной матрице кода Хэмминга, Коэффициенты усиления первых сумматоров 2.1-2.П по входным сигналам объекта управления U,...,П обозначаются |3; и определяются соотношениямиPv.-i--PU-2--t.,-.,, (2) ,o--(,.,..,QL-/)B Устройство работает следующим об разом. Предположим сначала, что неиспра ности в контролируемом объекте управления отсутствуют. В каждом i-OM (,q) канале кон роля устройства входные и выходные сигналы контролируемого объекта управления, усиленные соответственн в о Р (коэффициенты ft и et,определяются согласно выражениям (2) и (1), складываются первым сумматором 2.1 и поступают на вход интегратора 3.1. Сигнал, получаемый в результате интегрирования, склады вается первым сумматором 2.2 с усиленными в i иос;, раз соответственно входными и выходными сигналами контролируемого линейного объекта управления и подается на вход интегратора 3.2, и так далее до тех пор, пока на выходе последнего инте ратора канала З.п не появится сигна ZJ, величина которого определяется I в соответствии с выражением 2.-1(,Д,р.,и.,„ (.р;,„и). Сигнал Z, поступает на вход i-Fo второго сумматора 4, где складывается с выходными сигналами проверяемого объекта управления ,...,9, усиленными соответственно в mi,i,.,,m раз (коэффициенты т, ,q; j l7s представляют собой элементы матрицы М, задаваемой исходя из требуемой достоверности контроля), и выходными сигналами последних интеграторов 3 всех последунмцих каналов контроля, т.е. сигналами-Zp, ,q, усиленными в Jg. раз соответственно (коэффициенты jfр. находятся согласно выражению (1)). Выходным сигналом i-ro второхо сумматора 4 является сигнал bj, которь1й равен нулю при правильной работе контролируемого линейного объекта управления .т.е. ,,,. что может быть легко доказано. Сигналы i, определяемые в соответствии с выражением (4), обладают чрезмерной чувствительностью к малым отклонениям и низкочастотному дрейфу параметров и сигналов. Для устранения этого недостатка необходимо охватить каналы контроля устройства дополнительными обратными связями, в результате чего на третьи входы первого сумматора первого звена и на четвертые входы первого сумматора остальных звеньев всех каналов будут поступать выходные сигналы Д; всех вторых сумматоров 4. Коэффициенты усиления первых сумматоров 2.1-2.П по сигналам А|, ,q для простоты.можно принять равными 1. Так как при правильной работе контролируемого объекта управления сигналы Д 0, то их поступление на первые сумматоры 2.1-2.П не вызьгаает никаких изменений в работе устройства. Сигналы Д, Я поступают на входы пороговых элементов 5.1-5.q осуществляющих сравнение сигналов с нулевым уровнем. В связи с тем, что при правильной работе контролируемого линейного объекта управления входные сигналы пороговых элементов 5.1-5.q равны , то и их выходные сигналы равны нулю. Поэтому выходной сигнал элемента ИЛИ 6, на вход которого поступают выходные сигналы всех пороговых элементов 5.1-5.q также равен нулю. Вследствие этого будет светиться табло блока 7 индикации, указывающее на исправность контролируемого линейного объекта управления. Рассмотрим теперь работу устройства для функционального койтроля при появлении неисправности в объекте управления. Предположим, что возникшая неисправность привела к тому, что оди из выходных сигналов объекта управл кия, например Y , стал равен Y Y iY , где &Y) - величина приращения сигнала YJ, за счет возникшей неисправности. Вследствие этого можно записать, что вектор выходных сигналов объекта управления „ Y + UY где tkY bY, , 0,..., Тогда вектор выходных сигналов вторых сумматоров 4.1-4.q, сформированиых в результате прохождения входных выходных Y,, Y2,...,Yg сигналов контролируемого линейного объекта управления через кянялы контопля 1.1-1.q устройства пля функционального контроля равен ).,vV(,.,u).,...,. foUc,NU).(oi.,Y /PfiHlV,...(otoY+f3oUl |4. .-. « Первая из составпяющих вектора выходных сигналов Л, равна нулю. Поэтому .E...,ibV.,...,faL,-J-,hy Вследствие того, что матрица М задается таким образом, что в каждом ее столбце имется хотя бы один ненулевой элемент, среди совокупно ти выходных сигнатов i.1-u.q вторы сумматоров 4.1-4.q хотя бы один сигнал будет отличен от нуля. Это приводит к тому, что уровень выход ного сигнала соответствующаго из пороговых элементов 5.1-5.q будет равен уровню логической единицы, вследствие чего на выходе элемента ИЛИ 6 появляется сигнал, отличный от нуля. Этот сигнал, поступая на блок индикации 7, включает световое табло последнего, свидетельствующее о появлении неисправности в контролируемом объекте управления. Если неисправности возникнут не в в одном, а в нескольких блоках контролируемого линейного объекта управления, то благодаря особому виду матрицы контрольных условий М (которую, как отмечалось, можно выбрать аналогично проверочной матрице кода Хэмминга), они не будут скомпенсированы, т.е. в-отличие от известного устройства, неисправности такого вида будут выявлены с помощью предлагаемого устройства. Пример. Пусть контролируемый объект состоит из трех линейных блоков с передаточными функциями вида V, .(Pl4 соединенных произвольным образом. Тогда выходной сигнал Л известного устройства описывается выражением 2) biU,(,H K-VjVo, ,3 - соответственно входные и выходные сигналы блоков контролируемого объекта управления. Предположим, что вследствие неисправностей выходные сигналы блоков Y принимают значения V Y+1 2, 2 Очевидно, что при возникновении неисправностей во.всех трех блоках выходной сигнал устройства остается равным нулю, т.е. -появление дефектов в контролируемом объекте управления не будет обнаружено. Перейдем теперь к предлагаемому устройству для функционального контроля. Выберем матрицу контрольны : условий М, равную Г О 1 1 L 1 о 1
911
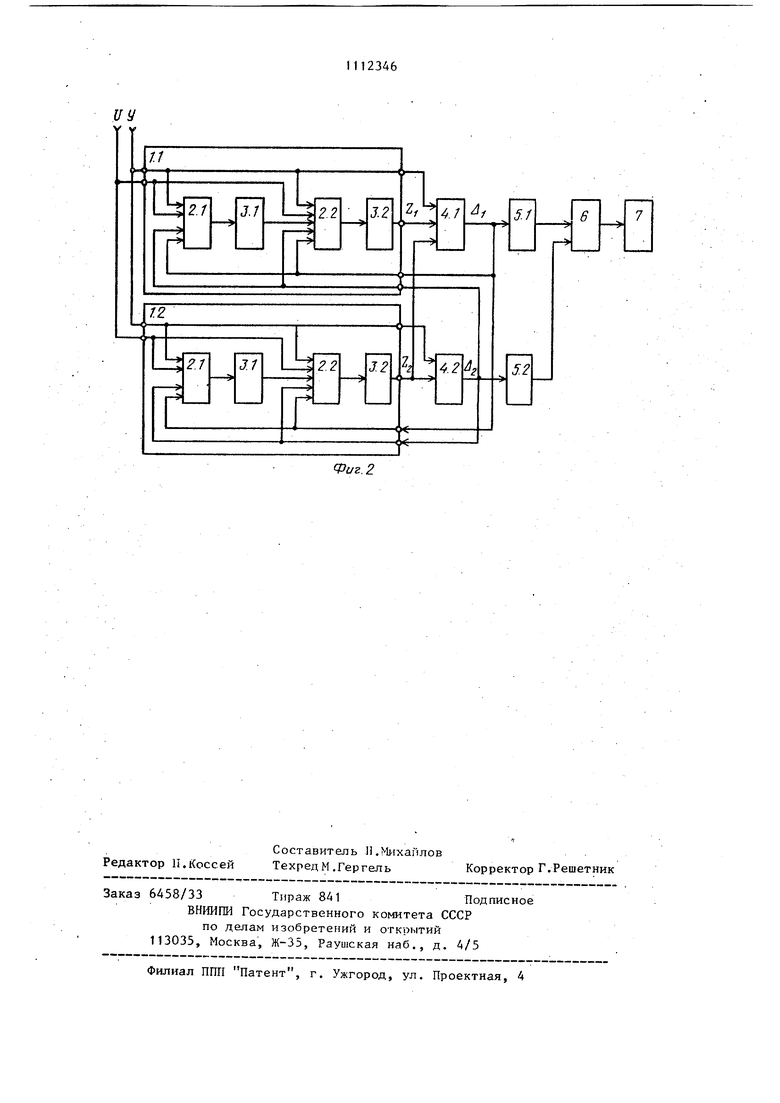
т.е. число каналов контроля устройства q2.
Так как показатели наблюдаемости
контролируемого объекта управления , , , то оба канала контроля будут содержать по два звена (фиг.2). Коэффициенты усиления первых сумматоров каналов контроля по входным и выходным сигналам контролируемого -объекта управления соответственно равны
Коэффициент усиления второго сумматора первого канала контроля по выходному сигналу последнего интегратора второго канала У,, Тогда выходные сигналы вторых сумматоров
10
обоих каналов контроля соответственно опрепеляются по следующим выражениям
--VV F t-YrV,.,
,-J(,Y,
Очевидно, что паяо если вследствне возникновения неисправностей выходные сигналы контролируемого объекта управления примут значения, указанные выше, сигнал Л, и bj У дут отличны от нуля, свидетельствуя о наличии дефекта.
Таким образом, в предлагаемом устройстве значительно уменьшается вероятность взаимной компенсации возникающих при неисправностях изменений величин сигналов, снимаемых с контролируемого объекта управления, т.е. повьппается достоверность контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ДИАГНОСТИРОВАНИЯ ЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ | 1993 |
|
RU2099766C1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Устройство для функционального контроля систем управления | 1983 |
|
SU1145323A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Устройство для функционального контроля систем управления | 1977 |
|
SU732820A1 |
| УСТРОЙСТВО ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ | 1997 |
|
RU2141722C1 |
| Устройство для контроля инерционных звеньев | 1982 |
|
SU1119032A1 |
| Устройство для контроля исправности объекта | 1981 |
|
SU987581A1 |
| УСТРОЙСТВО ИМИТОЗАЩИТЫ ГРУППЫ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2015 |
|
RU2595991C1 |
УСТРОЙСТВО ДЛЯ ФУНКЦИОНАЛЬНОГО КОНТРОЛЯ ЛИНЕЙНОГО ОБЪЕКТА УПРАВЛЕННЯ, содержащее блок индикации, канал контроля, состоящий из п звеньев, каждое из которых содержит первый сумматор и соединенный с его выходом интегратор, и второго сумматора, подключенного вторым входом к выходу интегратора последнего звена, первые входы второго сумматора соединены с первыми входами первых сумматоров и с выходами контролируемого линейного объекта управления, входами соединенного со вторыми входами первых сумматоров, трет-ьи входы первых сумматоров каждого звена, кроме первого, соединены с выходом интегратора предыдущего звена, отличающееся тем, что, с целью повышения достоверности результатов контроля, в устройство введены Cq-1) каналов контроля, идентичных по структуре первому каналу контроля, q пороговых элементов и элемент ИЛИ выходом подключенный к входу блока индикации, а входами связанный с выходами q пороговых элементов, вход каждого из которых соединен с выходом второго сумматора данного канала контроля, а также с одним из третьих входов первого сумматора первого звена и с одним из четвертых входов первого сумматора остальных звеньев всех каналов контроля, а третьи входы второго сумматора каждого канала контроля, кроме последнего, соединены соответственно с выходами интеграторов последних звеньев всех следующих каналов контроля. 
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для функционального контроля систем управления | 1972 |
|
SU439790A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU349002A1 | |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
