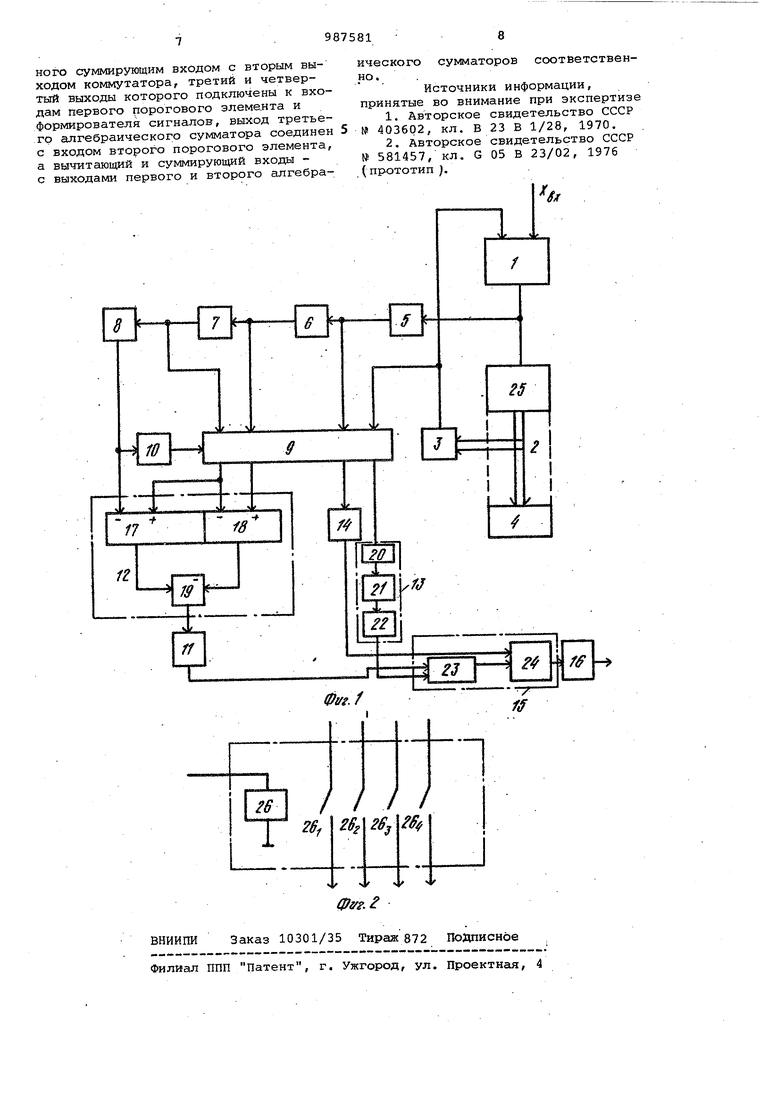
Изобретение относится к автоматике и может быть использовано в системах контроля при проведении периодических проверок систем управления. Известно устройство для определения неисправности регулирующего органа, позволякадее фиксировать неисправность регулирующего органа в аварийных ситуациях, содержащее датчики аварийных ситуаций: датчики углов, срабатывающие при превышении объекто управления допустимых значений углов вокруг центра масс, датчики давления масла, напряжения в гидроприводе и т.д. При наличии хотя бы одной-неисправности срабатывает, исполнительный эfлeмeнт,который принудительно возвращает регулирующий орган в нейтральное исходное положение tl Недостаток данного устройства заключается в его низкой универсальности: для каждого вида органов регулирования необходимы свои датчики ; отказов по, количеству аварийных ситуаций. Кроме того, наличие в уст указанных датчиков не дает однозначного ответа, в результате -. чего возникает неисправность органа управления.. Наиболее близким к предлагаемому по. технической сущности является устройство, содержащее датчик сигнала управления, выход которого через первый формирователь сигнала подключен к первому входу суммирующего усилителя, второй вход которого соединен с датчиком обратной связи, выход суммирующего ус;илителя подключен к входу привода, которых механически соединен с датчиком : обратной связи и органом управления, коммутирующий элемент, к выходу которого подключен индикатор отказа, дифференцирующий элемент,, элемент НЕ, пороговые элементы, второй формирователь сигнала и элемент И,к первому входу которого через последовательно соединенные элементы НЕ, пороговый элемент, второй формирователь сигнала и дифференцирующий элемент подключен второй вход суммируквдегб усилителя, выход которого через второй пороговый элемент соединен с вторым входом элемента И, выход которогкэ подключен к входу коммутирующего элемента t23. Недостаток известного устройства :заключается в низкой достоверности результатов контроля. Данное устройстSo сигнализирует о ниличии неисправности только в том случае, когда при Ненулевом входном сигнале сигнал, снимаемый с датчика обратной связи, отсутствует либо постоянен.Однако су ществует целый ряд факторов, свйдетельствунлцих о неправильном функциоЙировании органа управления, которые не воспринимаются данньм устройством как неисправности. К таким факторам относятся неправильная обработка сиг нала обратной связи, потеря устойчивости привода. Цель изобретения - повышение достоверности результатов контроля. Поставленная цель достигается тем, что в устройство для контроля исправности объекта, содержащее блок сравнения, первый вход которого является входом устройства, вто рой вход соединен с выходом датчика состояния контролируемого объекта, блок сравнения, выходом подключенный к управляющему выходу стройства, три пороговых элемента, формирователь сигнала и индикатор отказа, введены последовательно соединенные блок выделения модуля, интегратор, первый и второй элементы задержки, три алгебраических сумматора, а также коммутатор и блок логики, выходКоторого подключен к входу индикатор , первый вход - к выходу первого порогового элемента, второй вход - к выходу второго порогового элемента, а третий вход - к выходу формирователя сигналов, управляющий вход коммутатора соединен с выходом третьего порогового элемента, а информационные входы - к выходам датчика состояния контролируемого объек та, блока вьщеления- модуля, интегратора и первого элемента задержки, вычитающий вход первого.алгебраического сумматора соединен с входом третьего порогового элемента и с выходом второго элемента задержки, а суммирующий вход - с первым выходом коммутатора и с вычитающим входом второго алгебраического сумматора, соединенного суммируклцим входом с вторым выходом коммутатора, третий и четвертый выходы которого подключены к входам первого порогового элемента и формирователя сигналов, выход третьего алгебраического сумматора соединен с входом второго порогового элемента, а вычитающий и суммирующий входы - с выходами первого и второго алгебраических сум маторов соответственно, .На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - электрическая схема четырехканального коммутатора. Устройство (фиг. 1) содержит бло 1 сравнения, контролируемый объект 2, датчик 3 состояния контролируемого объекта, орган 4 управления, блб1 5 выделения модуля, интегратор 6, первый 7 и второй 8 элементы задержки, коммутатор 9, третий 10 и второй 11 пороговые элементы, вычислительный блок 12, формирователь 13 |сигнала, первый пороговый элемент 14, логический блок i5, индикатор 16 отказа, первый 17, второй 18 и ;:третий 19 алгебраические сумматоры, дифференциатор 20, блок 21 выделения модуля, пороговый элемент 22, элемент И-НЕ 23, элемент и 24 и привод 25 объекта 2. Управляющий вход коммутатора 9 (фиг, 2) подсоединен к обмотке реле 26, снабженного замыкающими контактами . Устройство работает следующим образом.. Входной сигнал контроля (зондирующий сигнал Xg(.t) поступает на пёрйьй вход блока 1, где сравнивается с сигналом Xc,t} датчика 3. Таким образом, на входы привода 25 объекта 2 и блока 5 поступает сигнал €U) Xg(tJ - Xoj-U). Как Правило, сигнал Xa(t) представляет собой ступеньку напряжения, хотя это и не принципиально. Исправный орган 4 двигается до тех пор, пока сигнал ) не станет равным нулю или не достигнет установившегося значения. С выхода блока 5 сигнал l€tt)l поступает на интегратор б, где происходит его преобразование в соответствие с зависимостью S J/g(t)/dt, ба затем этот .сигнал поступает на последовательно соединенные два одинаковых элемента 7 и 8, сигналы на выходе которых соответственно имеют вид S(t Т) я S(t - 2Т), где Т - время задержки сигнала. При появлении сигнала на выходе элемента 8 элемент 10 срабатывает, выходной -сигнал его является достаточным для срабатывания реле 26 коммутатора 9. Контакты реле 26 - 26 замыкаются, образуя четыре канала коммутации. При этом выходНой сигнал S(t - Т) элемента 7 поступает на положительный вход сумматора 17 и одновременно на отрицательный вход сумматора 18 блока 12. Сигнал s(t - 2Т ) с выхода элемента 8 поступает на отрицательный вход сумматора 17, а сигнал S(t) с выхода интегратора б - на положительный вход сумматора 18. Тогда на выходе блока 12 формируется сигнал YU) fs(t-T)-S(,t-2T) S(t-T;j,(2). Учитывая в выражении (2) соотношение (1. ), имеем t-r t YU j/e(t;dt- j )dt. (3) -t-2r -t-T Полученное выражение (3 ) предста ляет собой разность площадей -под кривой, образованной модулем/e(t)f на предыдущем и последующем интерва лах времени, равных Т. При исправной работе органа 4 модуль / (,t) / уменьшается, следовательно, сигнал Y(.t) должен быть всегда положительным и стремиться к нулю при окончании переходного процесса. При наличии только положительного сигнала Y(t ) срабатывает элемент 11, выходной сигнал которого поступает на элемент И-НЕ 23 При движении органа 4 сигнал ) с выхода датчика 3.поступает на фор мирователь 13, где он дифференцируе ся, проходя через дифференциатор 20 преобразуется блоком 21 и поступает на вход элемента 22, выходной сигна которого поступает на второй вход элемента И-НБ 23. На выходе элемента И-НЕ23 сигнал .отсутствует. Следовательно, он отсутствует и на втором входе элемента И 24. При замыкании контакта реле 26 комглутатора 9 от выходного сигнала/set)/ блока 5 срабатывает элемент 14, который подает сигнал на элемент И 24. Изза отсутствия сигнала на входе элемента И 24 последний несрабатывает и не подключает индикатор 16. Элемент 14 подает сигнал на перв вход элемента И 24 в течение всего времени проверки исправности органа управления до тех пор, пока сигнал /SCt)/ не станет меньше порога срабатывания. Таким образом, начало проверки совпадает с моментом сраба тывания элемента 10, а окончание пр верки - с окончанием переходного процесса. Предположим, что при поступлении входного сигнала XцJ Ct) орган 4 ос тается неподвижным,либо неисправен датчик 3, точка на выходе форми рователя 13 и, следовательно, на входе элемента И-НЕ 23 сигнал не появится, но он появится на выходе элемента И-НЕ 23, а значит, и на втором входе элемента И 24. Это, в свою очередь, приводит к срабатыван элемента И 24, который подключает и дикатор 16. Индикатор 16 включен и при неустойчивой работе привода 25 объекта 2. В этом случае сигнал YCt) отрицателен, так как каждая предьщущая подинтегральная площадь в выражении 13) меньше последующей.При этом ,элемент 11 не срабатывает, что приводит к появлению сигнала на втором входе элемента И 24 и подключению индикатора 16. Индикатор 16 также включен и при отрабатывании .органом 4 входного сигнала с ошибкой, большей чем уровень срабатывания элемента 14. Действительно, в этом случае по окончании переходного процесса сигнал на выходе блока 12 Y(t) равен нулю и, следовательно, не будет сигнала на входе элемента И-НЕ 23, но он будет на втором входе элемента И 24. Таким образом, схема предлагаемого устройства позволяет расширить функциональные возможности устройства и тем самым повысить достоверность результатов контроля исправности. Кроме того, положительным эффектом устройства является и то, что контроль исправности органа управления осуществляется по соответствию качественных характеристик функционирования органа управления их требуемым показателям, в частности, по величине установившейся ошибки. Формула изобретения Устройство для контроля исправности объекта, содержащее блок сравнё-i. ния, первый вход которого является входом устройства, второй вход соединен с выходом датчика состояния контролируемого объекта, блок сравнения, выходом подключенный к управляющему выходу устройства, три пороговых элемента, формирователь сигнала и индикатор отказа, отличающ е е с я тем, что, с целью повышения достоверности результатов конт роля, в него.введены последовательно соединенные блок выделения модуля, интегратор, первый и второй элементы задержки, три алгебраических сумматора, а также коммутатор и блок логики, выход которого подключен к ; входу индикатора отказа, первый вход к выходу первого порогового элемента, второй вход - к выходу второго порогового элемента, а третий вход к выходу формирователя си гналов, управляющий вход коммутатора соединен с выходом третьего порогового элемента,а информационные входя с выходами датчика состояния контролируемого объекта, блока выделения модуля, интегратора и первого элемента задержки, вычитающий вход первого алгебраического сумматора соединен с входом третьегЬ порогового элемента и с выходом второго элемента задержки, а суммирующий вход - с первым выходом коммутатора и с вычитающим входом второго алгебраического сумматора, соединенного суммирующим входом с вторым выходом коммутатора, третий и четвертый выходы которого подключены к входам первого порогового элемента и формирователя сигналов, выход третьего алгебраического сумматора соединен с входом второго порогового элемента, а вычитающий и суммирующий входы с выходами первого и второго алгебраического сумматоров соответственно. .
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 403602, кл. В 23 В 1/28, 1970.
2.Авторское свидетельство СССР № 581457, кл. G 05 В 23/02, 1976 (прототип ).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дифференциальной защиты и узел контроля исправности съемных кассет защиты | 1981 |
|
SU1001279A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЗОНАНСНЫХ ЧАСТОТ ОБЪЕКТА | 1991 |
|
RU2025684C1 |
| Устройство для дифференциально-фазной защиты | 1982 |
|
SU1113866A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ | 1995 |
|
RU2099778C1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАНЫ | 1992 |
|
RU2079889C1 |
| Устройство для регистрации значений контролируемых параметров | 1982 |
|
SU1065689A2 |
| Устройство для решения систем линейных алгебраических уравнений | 1984 |
|
SU1187157A1 |
| Устройство для регулирования расхода жидкости | 1984 |
|
SU1236434A2 |
| Способы симуляции трения покоя и устройства для их реализации (варианты) | 2021 |
|
RU2779278C1 |
| Устройство для регистрации значений контролируемых параметров | 1987 |
|
SU1509594A1 |
0l/g.f
//
