УСТРОЙСТВО для ФУНКЦИОНАЛЬНОГО КОНТРОЛЯ
(541 СИСТЕМ УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для функционального контроля систем управления | 1975 |
|
SU634240A2 |
| Устройство для функционального контроля систем управления | 1983 |
|
SU1145323A1 |
| Система управления процессом культивирования микроорганизмов | 1989 |
|
SU1655992A2 |
| Система адаптивного управления | 1980 |
|
SU932461A1 |
| Адаптивная система для идентификации объекта управления | 1980 |
|
SU875337A1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| Пропорционально-интегрально-дифференциальный регулятор для объектов с запаздыванием | 1988 |
|
SU1596304A1 |
| Система управления процессом культивирования микроорганизмов | 1988 |
|
SU1555698A2 |
| Адантивное устройство для идентификации объекта управления | 1987 |
|
SU1478190A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |

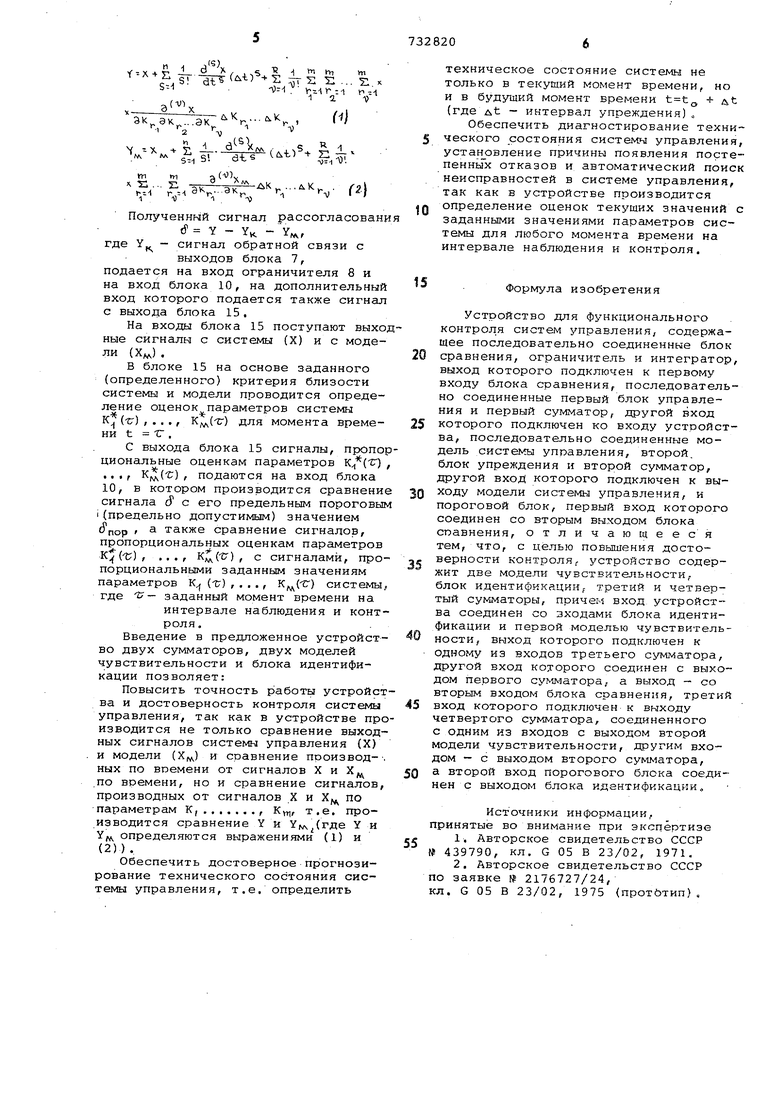
Изобретение относится к области контрольно-измерительной техники и может быть применено для функционал ного и диагностического контроля технических объектов. Известно устройство для диагност ческого контроля, содержащее последовательно соединенные блок сравнения, ограничитель и интегратор, позволяющее проводить диагностический контроль несложных по структуре объектов 1. Однако функциональные возможности такого устройства ограничены. Наиболее близким техническим реш нием к изобретению является устройст во, содержащее последовательно соединенные блок сравнения, ограничитель и интегратор, выход которого подключен к первому входу блока сравнения, последовательно соединен ные первый блок управления и первый сумматор, другой вход которого подключен ко входу устройства, последовательно соединенные модель системы управления, второй блок упреждения и второй сумматор, другой вход которого подключен к выходу модели системы управления, и пороговый блок, первый вход которого соединен со вторым выходом блока сравнения 2J. Недостатками устройства являются невысокая точность работы и невозможность прогнозирования технического состояния контролируемой системы. Целью изобретения является повышение достоверности контроля. Эта цель достигается тем, что предложенное устройство содержит две модели чувствительности, блок идентификации, третий и четвертый сумматоры. Вход устройства соединен со входами блока идентификации и первой моделью чувствительности, выход которой подключен к одному из входов третьего сумматора, другой вхо.ц которого соединен с выходом первого сумматора, а выход - со вторым входом блока сравнения, третий вход которого подключен к выходу четвертого сумматора, соединенного одним из входов с выходом второй модели чувствительности, другим входом - с выходсм второго сумматора. Второй блок порогового блока соединен.с выходом блока и идентификации. . Структурная схема устройства представлена на чертеже.
Устройство содержит модель 1 контролируемой системы управления (об-ьекта) 2, первый 3 и второй 4 блоки упреждения. Первый 5 и второй 6 сумматоры, блок сравнения 7, ограничитель 8, интегратор 9, пороговый блок 10, первую 11 и вторую 12 модели чувствительности, третий 13 и четвертый 14 су 1лмэторы и блок идентификации 15,
УсТгоойство работает следующим образом.Параллельно системе 2 устанавливается модель 1, математическое описание которой соответствует математическому описанию системы управления. Допустим, что физические процессы в системе 2 описываются в общем виде нелинейным дифференциальным уравнением
dx .
(t,x,V(t),...,-k(t1,v,X
t - время; X - выходная координата системы; f - нелинейная функция;
V - входной сигнал; - f - возмущения; K(-t),..,,К(-t)- внутренние параметры системы управления, являющиеся функциями времени.
ческие процессы в эталонной системы управления описываютщем виде системой дифференциуравнений
В сумматоре 5 производится сложе-, ние сигналов X и Z.. С выхода этого сумматора сигнал, пропорциональный величине + Z., поступает на вход сумматора 13.
f В модели 11 производится формирование производных от выходного сигнала системы управления по внутренним параметрам этой системы, т.е. формирование функций чувствительности. Q С выхода модели 11 сигнал, пропорциональный величине
(
R
m tin
гП Б
С
- Л
ДК...дК
V
V- V-v
По -0
СИ г.
где д). - отклонение внутреннего
d
параметра системы k.
r-f от расчетного значения,
0 поступает на вxJDД сумматора 13.
В этом сумматоре производится сложение сигналов Z л . с выхода сумматора 13 сигнал, пропорциональный величине W, . поступает 5 на вход блока 7.
Выходной сигнал модели поступает на входы блока 4, сумматора 6, блока 15 и модели 12.
В блоке 4 производится формирование производных по времени от выходного сигнала модели. С-выхода блока 4 сигнал,.пропорциональный величине - -- Nvf4.So.---. где ,..., К - расчетные значен параметров, Входной сигнал V является общим для систем13 и модели. Этот сигнал берется непосредственно из контура .системы управления, составной часть .которой является диагностируемый об-ьект. Выходной сигнал X системы 1 пост пает на вход блока 3, на первые вхо ды суммато1эа 5 и блока 15 и на вход модели 11.. В блоке 3 производится формирова ние производных по времени от выход ного сигнала системы управления, С блока 3 сигнал, пропорциональный величине n 1 лй)ч, т ч v /Ai ЧЬ -g,sT-at-5- . где At..- интервал упреждения (предсказания) , поступает на второй вход сумма.тора поступает на вход сумматора б, в .котором производится сложение сигналов Х и Z, а с выхода сумматор а 6 сигнал, пропорциональный величине W, Zg, поступает на вход сумматора 14, В модели 12, производится формирование производных от выходного сигнала модели 2 по внутренним параметрам модели. С выхода модели 12 сигнал, пропорционапьный величине Э 1 л S rn- TJ S ... S д.; ij-i; i;- uvK .ЛК .4 - - г.-И1г 1 rcl 9K ЭК .9K где Yj изменение внутренних параметров модели 2 поступает на вход сумматора 14, в котором производится сложение.сигналов Ui и Z/v С выхода сумматора 14 сигнал, пропорциональный величине )У2 поступает на вход блока 7, производящем сравнение сигналов Y и У,, - V-Kj.t- S JL. 1 1 I ,ЗУ S S ... 51,: s-i . -vr-i П--1 ,... e R -1 Д. д-Ч -ЬГч- n ox -)s.i TJ. -ЛК ...лК., л - Полученный сигнал рассогласовани tf Y - Y , где Y - сигнал обратной связи с выходов блока 7, подается на вход ограничителя 8 и на вход блока 10, на дополнительный вход которого подается также сигнал с выхода блока 15. На входы блока 15 поступают выхо ные сигналы с системы (X) и с модели (Хм) . В блоке 15 на основе заданного (определенного) критерия близости системы и модели проводится определение оценок параметров системы К (-сг) , . . ., К;(т) для момента времени t т . С выхода блока 15 сигналы, пропо циональные оценкам параметров К(Т) ..,, К|(-гг) , подаются на вход блока 10, в котором производится сравнени сигнала S с его предельным пороговы i(предельно допустимым) значением г также сравнение сигналов, пропорциональных оценкам параметров К(V) г ..., К() , с сигналами, про порциональными заданным значениям параметров К (-V) , . . . , К(С) системы где заданный момент времени на интервале наблюдения и конт роля. Введение в предложенное устройст во двух сумматоров, двух моделей чувствительности и блока идентификации позволяет: Повысить точность работы устройс ва и достоверность контроля системы управления, так как в устройстве пр изводится не только сравнение выход ных сигналов системы управления (X) и модели (Х) и сравнение производных по впемени от сигналов X и Х по времени, но и сравнение сигналов производных от сигналов X и Х по параметрам К,, , т .е. производится сравнение Y и Угл(где Y и Y, определяются выражениями (1) и (2)). Обеспечить достоверное прогнозирование технического состояния системы управления, т.е, определить техническое состояние системы не только в текущий момент времени, но и в будущий момент времени At (где At - интервал упреждения). Обеспечить диагностирование техни ческого состояния системы управления, устан овление причины появления постепенных отказов и автоматический поиск неисправностей в системе управления, так как в устройстве производится определение оценок текущих значений с заданными значениями параметров системы для любого момента времени на интервале наблюдения и контроля. Формула изобретения Устройство для функционального КОНТРО.ЛЯ систем управления, содержащее последовательно соединенные блок сравнения, ограничитель и интегратор, выход которого подключен к первому входу блока сравнения, последовательно соединенные первый блок управления и первый сумматор, другой вход которого подключен ко входу устройства, последовательно соединенные модель системы управления, второй, блок упреждения и второй сумматор, другой вход которого подключен к выходу модели системы управления, и пороговой блок, первый вход которого соединен со вторым выходом блока сравнения, отличающееся тем, что, с целью повышения достоверности контроляf устройство содержит две моде.пи чувствительности, блок идентификацииf третий и четвертый сумматоры, причем вход устройства соединен со входами блока идентификации и первой моделью чувствительности, выход которого подключен к одному из входов третьего сумматора, другой вход которого соединен с выходом первого сумматора, а выход со вторым входом блока сравнения, третий вход которого подключен к выходу четвертого сумматора, соединенного с одним из входов с выходом второй модели чувствительности, другим входом - с выходом второго сумматора, а второй вход порогового блока соединен с выходом блока идентификации, Источники информации, ринятые во внимание при экспертизе 1. Авторское свидетельство СССР 439790, кл. G 05 В 23/02, 1971. 2. Авторское свидетельство СССР о заявке № 2176727/24, л. G 05 В 23/02, 1975 (протЬтип).
